
技术摘要:
本发明涉及医疗器械领域,特别涉及一种偏瘫病人水平康复运动辅助工具,包括底座、控制装置、升降装置、平移装置、伸缩装置、转向装置、转动装置、张合装置、距离传感器和两摆体装置,底座上固设控制装置和升降装置的固定端,升降装置的活动端固连平移装置的固定端,平 全部
背景技术:
】 偏瘫是指同一侧上下肢、面肌和舌肌下部的运动障碍,是急性脑血管病的常见症 状。轻度偏瘫病人虽然尚能活动,但走起路来,往往上肢屈曲,下肢伸直。严重者常卧床不 起,丧失生活能力。按照偏瘫的程度,可分为轻瘫、不完全性瘫痪和全瘫。轻瘫:表现为肌力 减弱,肌力在4~5级,一般不影响日常生活,不完全性瘫较轻瘫重,范围较大,肌力2~4级, 全瘫:肌力0~1级,瘫痪肢体完全不能活动。 对于偏瘫患者,需要进行康复训练治疗,坐姿位摆动平衡训练和站姿位摆动平衡 训练是偏瘫康复训练中常用的训练方式;其中坐姿位摆动平衡训练包括坐姿位左右摆动平 衡训练和坐姿位前后摆动平衡训练,坐姿位左右摆动平衡训练的操作方法通常为:让患者 取坐位,头部保持正直,护士右手扶持在患者胸部左侧,左手扶持在患者腹部右侧,患者在 护士扶持下身体向左侧摆动一定距离,护士再将右手扶持在患者腹部左侧,左手扶持在患 者胸部右侧,患者在护士扶持下身体向右侧摆动一定距离,如此反复;坐姿位前后摆动平衡 训练的操作方法通常为:让患者取坐位,头部保持正直,护士右手扶持在患者背部,左手扶 持在患者腹部前侧,患者在护士扶持下身体向后摆动一定距离,护士再将右手扶持在患者 背部,左手扶持在患者胸部前侧,患者在护士扶持下身体向前侧摆动一定距离,如此反复; 站姿位摆动平衡训练与坐姿位摆动平衡训练的区别只在于患者处于站姿位,站姿位摆动平 衡训练其他操作方法及步骤与坐姿位摆动平衡训练相同。 目前对偏瘫患者进行坐姿位摆动平衡训练和站姿位摆动平衡训练时,都需要护士 一对一全程帮助,需要花费护士的大量工作时间,消耗护士的大量精力;现有的一些辅助设 备,比如申请公布号为CN 110946739 A的中国发明一种神经偏瘫康复日常锻炼辅助装置、 申请号为CN201820441548.3的中国实用新型偏瘫病人康复训练装置,在一定程度上也能辅 助患者进行康复训练,但目前还没有能够模拟医护人员的动作,帮助患者进行坐姿位摆动 平衡训练和站姿位摆动平衡训练的装置。 【
技术实现要素:
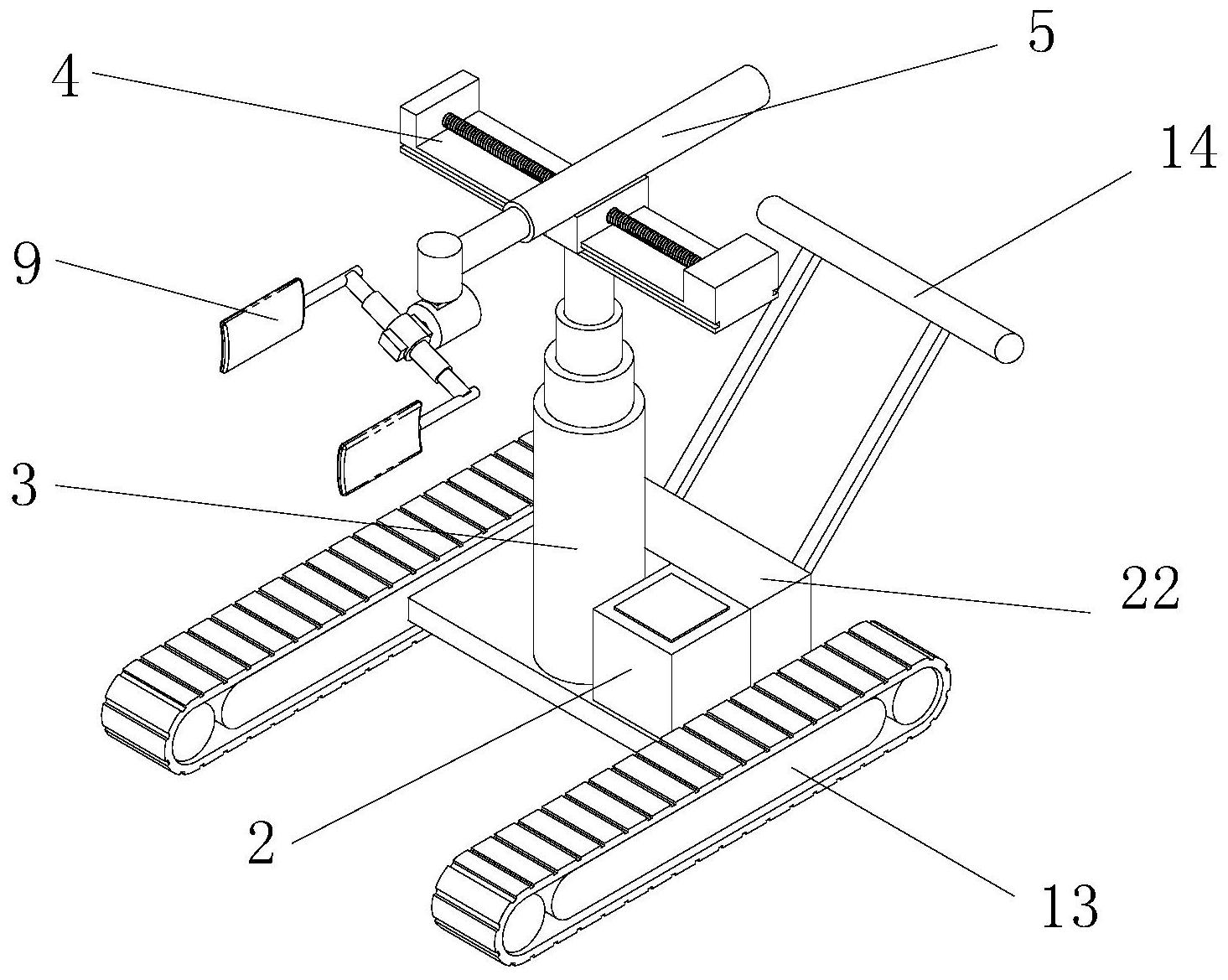
】 为了解决上述问题,本发明的目的在于提供一种偏瘫病人水平康复运动辅助工 具,模拟医护人员的动作,帮助患者进行坐姿位摆动平衡训练和站姿位摆动平衡训练,减轻 医护人员的工作负担。 为达到上述目的,本发明所采用的技术方案是: 一种偏瘫病人水平康复运动辅助工具,其特征在于:包括底座、控制装置、升降装 置、平移装置、伸缩装置、转向装置、转动装置、张合装置、距离传感器和两摆体装置; 底座下端面水平放置、上端面固设控制装置和升降装置的固定端,控制器上端设 置有参数输入操作面板,升降装置活动端的活动方向沿竖直直线方向,升降装置的活动端 5 CN 111544858 A 说 明 书 2/9 页 固连平移装置的固定端,平移装置活动端的活动方向沿水平直线方向,平移装置的活动端 固连伸缩装置的固定端,伸缩装置活动端的活动方向既垂直升降装置活动端的活动方向, 也垂直平移装置活动端的活动方向,伸缩装置的活动端固连转向装置的固定端,转向装置 活动端沿水平圆周方向转动,转向装置的活动端固连转动装置的固定端,转动装置活动端 的沿竖直圆周方向转动,转动装置的活动端固连张合装置的固定端,张合装置包括两活动 端,张合装置的两活动端沿与转动装置活动端转动轴线垂直相交的直线活动,距离传感器 固设在张合装置的固定端,距离传感器的测量端背向转动装置,距离传感器的测量方向与 张合装置的两活动端活动方向垂直,摆体装置包括连接杆和扶板,扶板与连接杆的一端转 动连接,扶板位于其转动轴线下端部分的质量大于扶板位于其转动轴线上端部分的质量, 两摆体装置的连接杆背向各自扶板的一端分别与张合装置的两活动端固连,两摆体装置扶 板的转动轴线均与转动装置活动端的转动轴线平行,两摆体装置扶板的长度方向均与转动 装置活动端的转动轴线平行;控制装置分别与升降装置、平移装置、伸缩装置、转向装置、转 动装置、张合装置、距离传感器控制电路连接。 优选地,升降装置和伸缩装置均为电动推杆;平移装置为电动滑台;转向装置为减 速步进电机;转动装置为伺服电机;张合装置包括两电动推杆,该两电动推杆的固定端相固 连,该固连端为张合装置的固定端;距离传感器为TOF距离传感器;进一步优选地,控制器为 windows系统的计算机或可进行编程的单片机,操作面板为触控面板。 优选地,两扶板相对的一面覆盖有软垫。 优选地,控制装置上安装有喇叭。 优选地,底座包括两支撑杆和支撑板,两支撑杆长度方向水平正对设置,两支撑杆 长度方向平行,支撑板两端分别与两支撑杆垂直固连,且固连处分别位于两支撑杆中部至 端部之间;升降杆的固定端与支撑板的中部固连;伸缩装置活动端的活动方向与支撑杆的 长度方向平行,转向装置、转动装置、张合装置、距离传感器和两摆体装置均位于对应支撑 杆较长的一侧。 优选地,还包若干车轮和刹车装置,若干车轮安装在底板两侧,刹车装置安装在车 轮内;进一步优选地,若干车轮为两履带轮,履带轮的长度方向与伸缩杆活动端的活动方向 平行,刹车装置为电动刹车装置,刹车装置与控制装置控制电路连接;再进一步优选地,还 包蓄电池,蓄电池安装在底座上,蓄电池分别连接控制装置、升降装置、平移装置、伸缩装 置、转向装置、转动装置、张合装置和距离传感器;更进一步优选地,底板背向转向装置一端 设置有推手,推手的长度方向从底板处背向转向装置倾斜向上。 一种偏瘫病人水平康复运动辅助工具的控制方法,包括以下步骤: (1)位置定位:预设对应升降装置活动端升降方向的坐标为Y坐标,对应平移装置 活动端平移方向的坐标为X坐标,对应伸缩装置活动端伸缩方向的坐标为Z坐标,控制装置 采集患者胸部宽度、腰部宽度、胸部厚度、腹部厚度、胸部中点Y坐标坐标值、胸部中点X坐标 坐标值、腹部中点Y坐标坐标值和腹部中点X坐标坐标值的数据,根据胸部中点Y坐标坐标 值、胸部中点X坐标坐标值、腹部中点Y坐标坐标值和腹部中点X坐标坐标值计算出胸腹中点 Y坐标坐标值和胸部中点X坐标坐标值;通过升降装置、平移装置和转向装置带动距离传感 器移至患者胸腹中点位置前方,根据胸部宽度、腰部宽度、胸部厚度、腹部厚度,计算出胸腹 中部左右两侧X坐标坐标值位置坐标,通过伸缩装置、转动装置和张合装置带动两扶板分别 6 CN 111544858 A 说 明 书 3/9 页 处于胸腹中部的左右两侧; (2)右摆一次:控制装置根据胸部宽度、腰部宽度、胸部厚度、腹部厚度、胸部中点Y 坐标坐标值、胸部中点X坐标坐标值、腹部中点Y坐标坐标值和腹部中点X坐标坐标值的数 据,计算出胸部宽度方向两侧的Y坐标坐标值、胸部宽度方向两侧的X坐标坐标值、腰部宽度 方向两侧的Y坐标坐标值和腰部宽度方向两侧的X坐标坐标值;通过转动装置和张合装置带 动两扶板分别贴合患者的胸部右侧和腰部左侧,平移装置带动张合装置8向右移动距离S; (3)左摆一次:通过转动装置和张合装置带动两扶板分别贴合胸部左侧和腰部右 侧,平移装置带动张合装置8向左移动距离2S; (4)右摆一次:通过转动装置和张合装置带动两扶板分别贴合胸部右侧和腰部左 侧,平移装置带动张合装置8向右移动距离2S; (5)左右重复:重复步骤(3)和(4)至设定摆动次数; (6)左右回位:通过转动装置和张合装置带动两扶板分别贴合胸部左侧和腰部右 侧,平移装置带动张合装置8向左移动距离S; (7)转向与定位:升降装置保持静止,通过平移装置、伸缩装置和转向装置带动距 离传感器移至患者左侧或右侧,并使距离传感器测量方向平行X坐标轴方向;控制装置通过 伸缩装置和距离传感器采集患者胸腹中部厚度方向两侧的Z坐标坐标值,并计算出该两侧 位置中点的Z坐标坐标值和Y坐标值,通过伸缩装置带动距离传感器移至该中点位置坐标左 侧方或右侧方,通过平移装置、距离传感器和张合装置带动两扶板分别处于胸腹中部的前 后两侧; (8)前摆一次:控制装置根据胸部宽度、腰部宽度、胸部厚度、腹部厚度、胸部中点Y 坐标坐标值、胸部中点X坐标坐标值、腹部中点Y坐标坐标值、腹部中点X坐标坐标值、胸腹中 部前后方向两侧中点X坐标坐标值和胸腹中部前后方向两侧中点Y坐标坐标值,计算出胸部 厚度方向两侧的X坐标坐标值、胸部厚度方向两侧的Y坐标坐标值、腹部厚度方向两侧的X坐 标坐标值和腹部厚度方向两侧的Y坐标坐标值;通过转动装置和张合装置带动两扶板分别 贴合胸部和背部,伸缩装置带动张合装置向前移动距离M; (9)后摆一次:通过转动装置和张合装置带动两扶板分别贴合背部和腹部,伸缩装 置带动张合装置向后移动距离2M; (10)前摆一次:通过转动装置和张合装置带动两扶板分别贴合胸部和背部,伸缩 装置带动张合装置向前移动距离2M; (11)前后重复:重复步骤步骤(9)和(10)至设定摆动次数; (12)前后回位:通过转动装置和张合装置带动两扶板分别贴合背部和腹部,伸缩 装置带动张合装置向后移动距离M; (13)重复:重复步骤(1)至(12)至设定的训练重复次数; (14)分离:张合装置带动两扶板与患者分离,平移装置的活动端移动至最左端,伸 缩装置缩至最短,平移装置活动端再移动至其行程中部。 综上,由于采用了上述技术方案,本发明的有益效果是: 本发明能够通过在控制装置操作面板上输入的数据以及距离传感器测量到的数 据,计算出患者胸部及腹部前后左右的位置,以控制扶板模拟医护人员的双手准确放置在 患者对应的部位上,通过平移装置、伸缩装置和开合装置的运动配合帮助患者完成坐姿位 7 CN 111544858 A 说 明 书 4/9 页 摆动平衡训练和站姿位摆动平衡训练,减轻医护人员的工作负担;根据患者的病情严重程 度,本发明可以适当调节左右摆动平衡训练次数、左右摆动平衡训练速度、前后摆动平衡训 练次数、前后摆动平衡训练速度和训练重复次数,能够适合多种病情的患者使用;本发明在 帮助患者进行康复训练的过程中,能够通过距离传感器测量的数据,判断患者是否出现了 意外倾倒,如果患者出现意外倾倒,本发明的升降装置、平移装置、伸缩装置、转向装置、转 动装置、张合装置在控制装置控制下暂停运动,并能够通过喇叭进行求助,大大降低了患者 在康复训练过程中意外倾倒后不能被及时发现的可能;在本发明的一些实施例中,还具有 蓄电池,使得本发明能够在一些不方便使用外部电源的情况下也能正常使用,增加车轮和 推手等装置,使本发明还能够很方便地进行转移和放置。 【附图说明】 图1是本发明实施例所提供的一种偏瘫病人水平康复运动辅助工具第一种实施例 的示意图。 图2是图1中A处的局部放大图。 图3是本发明实施例所提供的一种偏瘫病人水平康复运动辅助工具第一种实施例 另一状态的示意图。 图4是本发明实施例所提供的一种偏瘫病人水平康复运动辅助工具第一种实施例 控制关系的示意图。 图5是本发明实施例所提供的一种偏瘫病人水平康复运动辅助工具第二种实施例 的示意图。 图6是本发明实施例所提供的一种偏瘫病人水平康复运动辅助工具第三种实施例 的示意图。 图7是本发明实施例所提供的一种偏瘫病人水平康复运动辅助工具第三种实施例 控制关系的示意图。 其中:1-底座、11-支撑杆、12-支撑板、13-车轮、14-推手、2-控制装置、21-操作面 板、22-蓄电池、3-升降装置、4-平移装置、5-伸缩装置、6-转向装置、7-转动装置、8-张合装 置、81-距离传感器、9-摆体装置、91-连接杆、92-扶板。 【











