
技术摘要:
本发明公开了一种平面变半径圆域划分的正畸弓丝弯制顺序规划方法,它涉及正畸弓丝弯制技术领域,本发明根据患者的个性化正畸弓丝曲线,基于正畸弓丝曲线弯制点信息集、弯制点的机器人弯制信息集,结合机器人弯制正畸弓丝的运动特点,建立一种平面变半径圆域划分的正畸 全部
背景技术:
错颌畸形是危及人体健康的第三大口腔疾病,呈现较高的发病率,现代口腔医学 中,固定矫治是一种常用且有效的正畸治疗手段,而正畸弓丝的弯制是固定矫治技术的关 键,近年来,深受数字化制造技术的影响,传统的口腔制造加工工艺正发生革命性变化,口 腔正畸领域也受益于数字化技术,正畸矫治器中弓丝的加工正在向数字化发展。 在机器人弯制个性化正畸弓丝的过程中,个性化正畸弓丝与机器人弯制手爪间可 能发生干涉,干涉即个性化正畸弓丝与机器人弯制手爪发生碰撞,干涉发生后会大大影响 个性化正畸弓丝的弯制精度,进而影响矫治效果,致使所弯制的个性化正畸弓丝无法应用 于临床治疗;研究发现,在正向弯制个性化正畸弓丝的过程中,正向弯制即由未弯制的正畸 弓丝弯制成复杂的成形弓丝,干涉往往是由于不合理的成形控制点弯制顺序引起的,而合 理的正向弯制成形控制点弯制顺序可以有效地避免干涉的发生,获得合理的正向弯制成形 控制点弯制顺序是实现正畸弓丝数字化弯制的必要前提,但目前正畸弓丝弯制技术领域缺 少规划正向弯制成形控制点弯制顺序的方法,难以实现正畸弓丝数字化弯制。 对于正畸弓丝弯制规划的划分方法的研究,在本发明人已经授权的授权公告号为 CN107647925B的发明专利《一种用于正畸弓丝弯制规划的圆域划分方法》中提出了一种等 半径圆域划分方法,在正畸弓丝曲线上进行区域划分,最终对每个区域进行排序,从而得出 最终弯制点的弯制顺序,虽然这种方法对正畸弓丝弯制规划具有一定应用价值,但由于该 方法仅以一种无依据的均匀化标准对正畸弓丝曲线进行划分,所划分的圆域区间内通常会 存在弯制点密集程度过大或过小的情况,即划分后的区间未充分考虑到正畸弓丝曲线上弯 制点分布信息的个性化特点,从而不能有效避免弯制机器人产生空程无效动作或弯制过程 相互干涉动作,不利于发挥弯制机器人优势的最大化,也不能明显提高弯制效率。
技术实现要素:
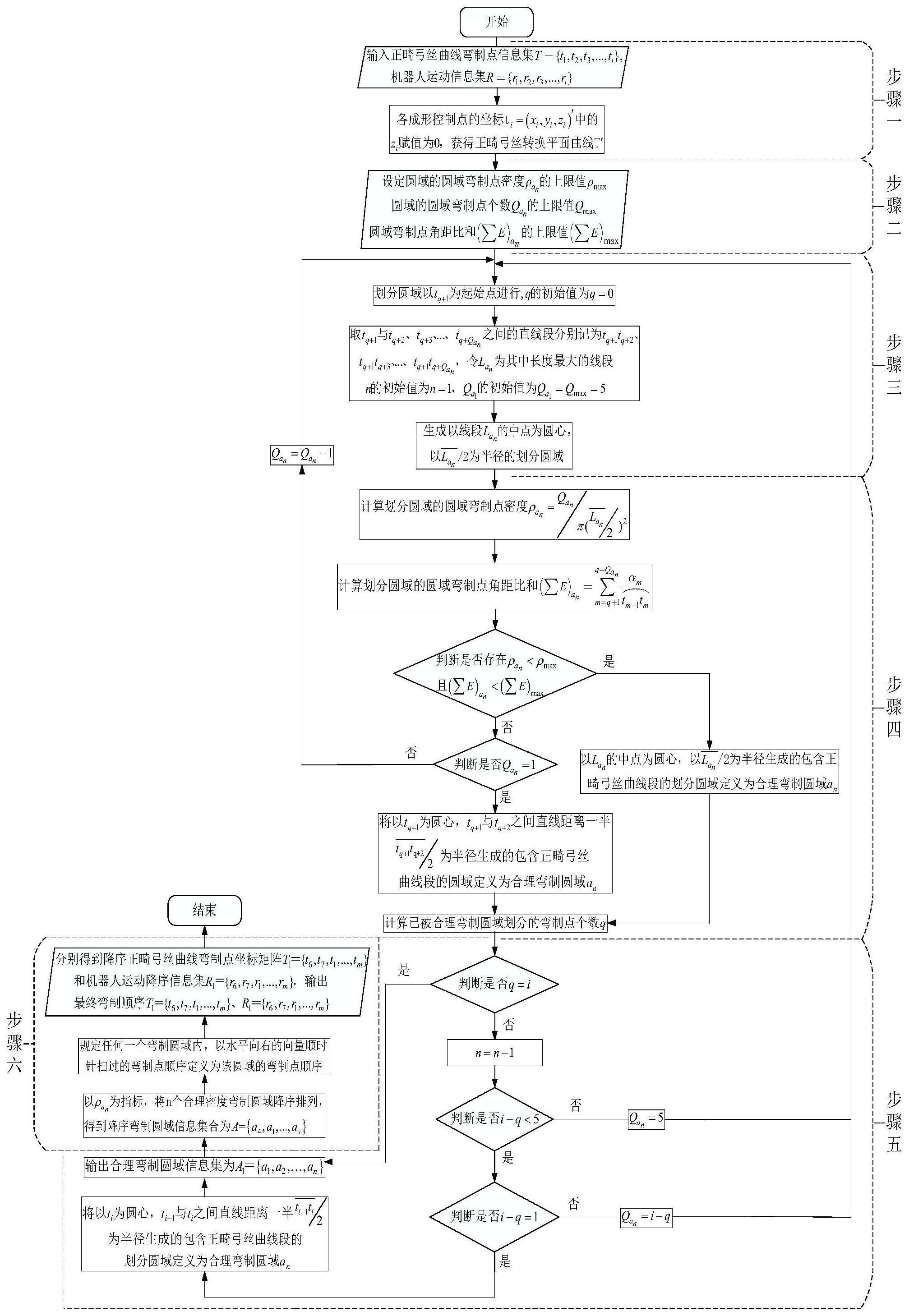
针对上述问题,本发明提出一种平面变半径圆域划分的正畸弓丝弯制顺序规划方 法,解决目前正畸弓丝弯制技术领域缺少获得合理正畸弓丝弯制顺序的方法,在弯制顺序 规划过程中提出合理的划分依据,对所划分区域的弯制点密集程度及弯制复杂程度定量约 束,最终获得符合正畸弓丝曲线上弯制点分布信息个性化特点的弯制顺序,从而发挥弯制 机器人优势的最大化,保证正畸弓丝弯制过程正常运作,提高正畸弓丝弯制规划的效率,避 免了机器人弯制正畸弓丝过程中出现干涉的问题。 上述目的主要通过以下方案实现: 一种平面变半径圆域划分的正畸弓丝弯制顺序规划方法,所述方法的具体实现过 程为: 5 CN 111588505 A 说 明 书 2/9 页 步骤一、变半径圆域划分数据导入及正畸弓丝曲线转换: 根据患者有i个弯制点的正畸弓丝曲线,计算并输入正畸弓丝曲线弯制点信息集 T={t1,t2,t3,...,ti},ti=(xi,yi,zi)′为每个正畸弓丝曲线弯制点的坐标,在每个弯制点 ti上机器人执行不同的弯制运动,每一个正畸弓丝曲线弯制点ti均对应一个弯制点机器人 弯制信息单元ri,输入弯制点的机器人弯制信息集为R={r1,r2,r3,...,ri},ri=(xi,yi,zi, αi)′表示机器人在弯制该点时的弯制点坐标及弯制角度,αi为机器人作用在弯制点ti上的 弯制角度; 将个性化正畸弓丝曲线成形控制点信息集中各弯制点的坐标ti=(xi,yi,zi)′中 的zi赋值为0,即令 zi=0,获得正畸弓丝曲线转换平面正畸弓丝曲线T′; 步骤二、圆域限制参数的设定 定义圆域弯制点个数,用符号 表示,圆域弯制点个数 为半径为 的圆域an内 的弯制点个数;定义圆域弯制点密度,用符号 表示,圆域弯制点密度 是圆域an内 个 弯制点在半径为 的圆域内紧密程度的量化描述,规定 圆域弯制点密度 的单位 为个/mm2, 为正畸弓丝曲线上第n个变半径划分圆域an的半径值;定义弯制点角距比,用符 号E表示,弯制点角距比是对单个弯制点的弯制复杂程度的量化描述,第i个弯制点的弯制 点角距比规定 特别地,由于第一个弯制点t1无需弯制,规定弯制点t1的弯制点角距 比E1=0;定义圆域弯制点角距比和,用符号 表示, 是对划分圆域an所划分的弯 制点整体弯制复杂程度的量化描述, 表示正畸弓丝曲线上第n个变半径划分圆域 an 内的所有弯制点的弯制点角距比之和,当变半径划分圆域a n内的弯制点分别为 时,规定 αm为作用在弯制点tm处的弯制角度, 表示作用在弯制点tm处弯制距离,即弯制点tm-1与tm之间曲线段的长度,m的取值范围 为 q表示正畸弓丝曲线上已完成变半径圆域划分的圆域内的所有弯制点个 数,即 未进行圆域划分时q=0,即q的初始值为q=0,q的取值范围为0≤q 6 CN 111588505 A 说 明 书 3/9 页 ≤i,将圆域弯制点密度 圆域弯制点角距比和 和圆域弯制点个数 统称为圆域限 制参数,分别对圆域限制参数的上限值进行限定,设定 的上限值Qmax,设定 的上限值为 ρmax,设定 的上限值(∑E)max,在整个圆域划分过程中Qmax、ρmax和(∑E)max恒为常数,特 别地Qmax=5,跳转至步骤三; 步骤三、确定划分圆域的半径和圆心: 划分圆域以弯制点tq 1为起始点进行,分别取弯制点tq 1与 之间 的直线段,依次记为线段 将线段 中长 度最大的线段记为 即 分别表示线段 的长度,则在正畸弓丝曲线上即将生成的第n 个划分圆域an的圆心为线段 的中点,半径为线段 长度的一半 此时恰好有两个弯 制点落到圆域边界线上,且新生成的圆域a n刚好能划分步骤三中预先规定的弯制点 规定圆域边界线所截的正畸弓丝曲线段上的所有弯制点被该圆 域所划分,当生成的圆域边界线通过弯制点时,则该弯制点也被圆域所划分,已被划分的弯 制点所在的正畸弓丝曲线段将不会再被其他圆域划分; 的初始值为 n的初 始值为 n=1,即首次划分第1个圆域a1时预先规定圆域划分到的弯制点刚好达到上限值, 此时所能划分到的弯制点分别为t1、t2、t3、t4、t5,且t1为划分圆域a1的起始点; 步骤四、定义合理弯制圆域: 按照 计算以直线段 的中点为圆心,以 为半径的划分圆域an 的圆域弯制点密度 按照 计算以直线段 的中点为圆心,以 为 半 径的 划分圆 域 a n 的 圆 域 弯 制点 角距比 和 判断 是 否 存 在 且 具体为: 如果 成立且 成立,说明以直线段 的中点为圆心,以 为半径的划分圆域的圆域弯制点密度 没有超过所设定的圆域弯制点密度上限值ρmax且圆 域弯制点角距比和 没有超过所设定的圆域弯制点角距比和上限值(∑E)max,则将以 直线段 的中点为圆心,以 为半径的包含正畸弓丝曲线段的划分圆域定义为合理弯 制圆域an,计算正畸弓丝曲线上所有已被合理弯制圆域划分的弯制点个数q,跳转至步骤 五; 7 CN 111588505 A 说 明 书 4/9 页 如果 不成立或 不成立,且存在 说明此时划分圆域的 圆域弯制点个数不少于1个,则继续减少圆域弯制点的个数进行圆域划分,令 计 算正畸弓丝曲线上所有已被合理弯制圆域划分的弯制点个数q,跳转至步骤三; 如果 不成立或 不成立,且存在 说明此时划分圆域 的圆域弯制点个数仅为1个,将以tq 1为圆心,以弯制点tq 1与相邻弯制点tq 2之间直线距离 的一半 为半径生成的包含正畸弓丝曲线段的划分圆域定义为合理弯制圆域an,则 该合理弯制圆域an上仅包含一个弯制点tq 1,计算正畸弓丝曲线上所有已被合理弯制圆域 划分的弯制点个数q,跳转至步骤五; 步骤五、判断是否继续进行圆域划分: 判断正畸弓丝曲线上所有已被合理弯制圆域划分的弯制点个数q是否与弯制点个 数i相等, 具体为: 如果正畸弓丝曲线上所有已被合理弯制圆域划分的弯制点个数q与弯制点个数i 不相等,则继续进行圆域划分,令n=n 1,即表示对下一个圆域进行划分,此时, 若i-q≥5,说明剩余未被划分的弯制点个数不少于5个,则令 即进行 下一个圆域的首次划分时预先规定圆域能划分到的弯制点刚好达到上限值,跳转至步骤 三; 若i-q<5且i-q≠1,说明此时正畸弓丝曲线上剩余未被划分的弯制点少于5个但 超过1个,则令 即进行下一个圆域的首次划分时令圆域能划分到的弯制点个数为 正畸弓丝曲线上剩余未被划分的弯制点个数,跳转至步骤三; 若i-q<5且i-q=1,说明此时正畸弓丝曲线上剩余未被划分的弯制点只有最后1 个弯制点ti,将以ti为圆心,以ti-1与ti之间直线距离的一半 为半径生成的包含正畸弓 丝曲线段的划分圆域定义为合理弯制圆域an,则该合理弯制圆域an上仅包含一个弯制点ti, 跳转至步骤六; 如果正畸弓丝曲线上所有已被合理弯制圆域划分的弯制点个数q与弯制点个数i 相等,说明所有的弯制点均已被合理弯制圆域划分,输出合理弯制圆域信息集合A1={a1, a2,...,an},跳转至步骤六; 步骤六、输出最终弯制顺序 计算每个合理弯制圆域(a1,a2,...,an)的圆域弯制点密度 获得圆域弯制点密 度信息集 比较各合理弯制圆域的圆域弯制点密度,假设得到 则以圆域弯制点密度 为指标将n个圆域降序排列,从而得到降序合理弯 制圆域信息集为A1={a3,a1,...,as},规定在任何一个弯制圆域,以水平向右的向量顺时针 扫过的弯制点顺序定义为该圆域的弯制点顺序,进而得到正畸弓丝曲线成形控制点坐标矩 阵T1={t7,t8,...,tm}和机器人弯制信息集R1={r7,r8,...,rm},其中tm表示第s个合理弯制 圆域中的弯制点,输出最终弯制点弯制顺序T1={t7,t8,...,tm}、R1={r7,r8,...,rm},程序 8 CN 111588505 A 说 明 书 5/9 页 结束。 本发明的有益效果为: 1、本发明针对正畸弓丝弯制规划方法,对圆域限制参数进行定义,提出了圆域弯 制点个数 和圆域弯制点密度 的概念,对弯制点的紧密程度量化描述,提出了圆域弯制 点角距比和 的概念,对划分圆域内弯制点弯制复杂程度进行量化描述,设定 的上 限值,可保证每个划分圆域弯制点个数不大于上限值,设定 的上限值ρmax和 的上限 值(∑E)max,从而可在一条正畸弓丝曲线上形成若干个符合设定要求的合理弯制圆域,避免 了所划分的圆域出现弯制点密度过大、弯制复杂程度过高的现象,从而最大程度避免了机 器人在弯制过程发生干涉的问题,通过对 等圆域限制参数的定义,便于在 正畸弓丝弯制规划中,利用圆域限制参数作为一种规划指标进行划分弯制点,为正畸弓丝 弯制规划提供了理论依据。 2、本发明采用变半径圆域划分的方法,划分区域的圆心和半径是由区域内的弯制 点的分布状况所决定的,区域内弯制点的个数的变化引起了圆域的圆心以及半径的改变, 能够更加充分的反映出区域弯制点的信息,便于系统对划分圆域数据的计算及选取,提高 了本方法的划分效率。 3、本发明采用变半径圆域划分的方法,由于弯制区域的划分是由弯制点信息决定 的,因此再进行新的区域划分时,不会存在弯制点被重复划分的情况,保证对所划分的区域 进行的规划是有意义的,提高了正畸弓丝弯制规划的合理性和精确度。 4、本发明在划分完所有弯制点后,以针对圆域划分定义的圆域弯制点密度 为指 标对n个圆域进行降序排列,得到了降序合理弯制圆域信息集,并规定在任何一个弯制圆 域,以水平向右的向量顺时针扫过的弯制点顺序定义为该圆域的弯制点顺序,保证了每个 弯制点有确定的弯制顺序,从而提高了正畸弓丝弯制规划的可操作性和准确性。 5、同本发明人同日申报的发明专利《一种基于弯制点角距比和的正畸弓丝变半径 圆域划分方法》相比,本专利所提供的方法不要求个性化正畸弓丝曲线的弯制点预先满足 单位弯制点密度的上限约束,另外同本发明人同日申报的发明专利《一种基于弯制点密度 的正畸弓丝变半径圆域划分方法》相比,本专利所提供的方法不要求个性化正畸弓丝曲线 的弯制点预先满足弯制点角距比的上限约束,因此与两种方法相比,本方法在圆域划分的 过程中圆域弯制点密度 和弯制点角距比和 两种限制因素联合作用,综上所述,本 方法不单单适用于具有特殊属性的一类个性化正畸弓丝曲线,而是对于所有能够采用平面 划分方法的正畸弓丝曲线都适用,因此在正畸弓丝弯制规划的平面划分的系列方法中具有 普遍适用性和全面性。 6、同本发明人已经授权的授权公告号为CN107647925B的发明专利《一种用于正畸 弓丝弯制规划的圆域划分方法》相比,在发明专利《一种用于正畸弓丝弯制规划的圆域划分 方法》中所定义的圆域划分半径均相等,存在所划分的圆域区间内弯制点密集程度过大或 过小的情况,即所生成的圆域区间未充分考虑到正畸弓丝曲线上弯制点分布信息的个性化 特点,仅以一种无依据的均匀化标准对正畸弓丝曲线进行划分,而本专利依据所定义的圆 9 CN 111588505 A 说 明 书 6/9 页 域限制参数对所划分区域的弯制点进行弯制复杂程度及密集程度的定量约束,从而导致划 分圆域的半径为符合圆域限制参数的规定而发生变化,最终得到符合正畸弓丝曲线上弯制 点分布信息个性化特点的不同半径的合理弯制圆域,有效避免完成划分后的各圆域内弯制 点的密集程度、弯制复杂程度相差悬殊的情况,一定程度上增强了正畸弓丝弯制规划方法 的合理性。 7、同本发明人已经授权的授权公告号为CN107647925B的发明专利《一种用于正畸 弓丝弯制规划的圆域划分方法》相比,由于完成划分后圆域不存在弯制点密集程度过大或 过小的情况,因此在弯制顺序规划完成后,弯制机器人将不会产生空程无效动作或弯制过 程相互干涉动作,从而可以发挥弯制机器人优势的最大化,保证正畸弓丝弯制过程正常运 作,提高正畸弓丝弯制规划的效率,避免了机器人弯制正畸弓丝过程中出现干涉的问题。 附图说明 为了易于说明,本发明由下述的具体实施及附图作以详细描述。 图1为一种平面变半径圆域划分的正畸弓丝弯制顺序规划方法流程图; 图2为个性化正畸弓丝弯制点分布示意图; 图3为变半径圆域划分个性化正畸弓丝曲线示意图;











