
技术摘要:
本发明属于无人机配件技术领域,公开了一种无人机用起落架减震控制系统及方法,两个斜撑中部通过转轴转动连接;通孔通过销轴与连接板转动连接,连接板一侧固定设置有内杆,内杆外侧套接有外杆,外杆上侧一体化设置有卡环,外杆下侧通过焊接有第一支架,第一支架两端下 全部
背景技术:
目前,无人机是一种以无线电遥控或由自身程序控制为主的不载人无人机。它的 研制成功和运用,揭开了以远距离攻击型智能化武器、信息化武器为主导的“非接触性战 争”的帷幕。与载人无人机相比,它具有体积小、造价低、使用方便等优点,受到人们的青睐。 起落架是无人机的重要组成部分,其主要是在无人机起飞过程中对无人机起支撑作用,在 无人机降落时可起到一定的缓冲作用。现有的无人机起落架虽然能够对无人机的机体形成 支撑并且能够支持无人机完成起飞或者降落着陆。但是现有的无人机起落架结构强度弱, 不耐冲击,无人机在降落着陆的过程中,在机体惯性的作用影响下,起落架承受了较大的冲 击力,容易造成内部零部件的松动,进而影响无人机的正常工作;且现有的起落架宽度固 定,只能适应特定宽度的无人机,适用性较差。 通过上述分析,现有技术存在的问题及缺陷为: (1)现有的无人机起落架结构强度弱,不耐冲击,无人机在降落着陆的过程中,在 机体惯性的作用影响下,起落架承受了较大的冲击力,容易造成内部零部件的松动,进而影 响无人机的正常工作。 (2)现有的起落架宽度固定,只能适应特定宽度的无人机,适用性较差。
技术实现要素:
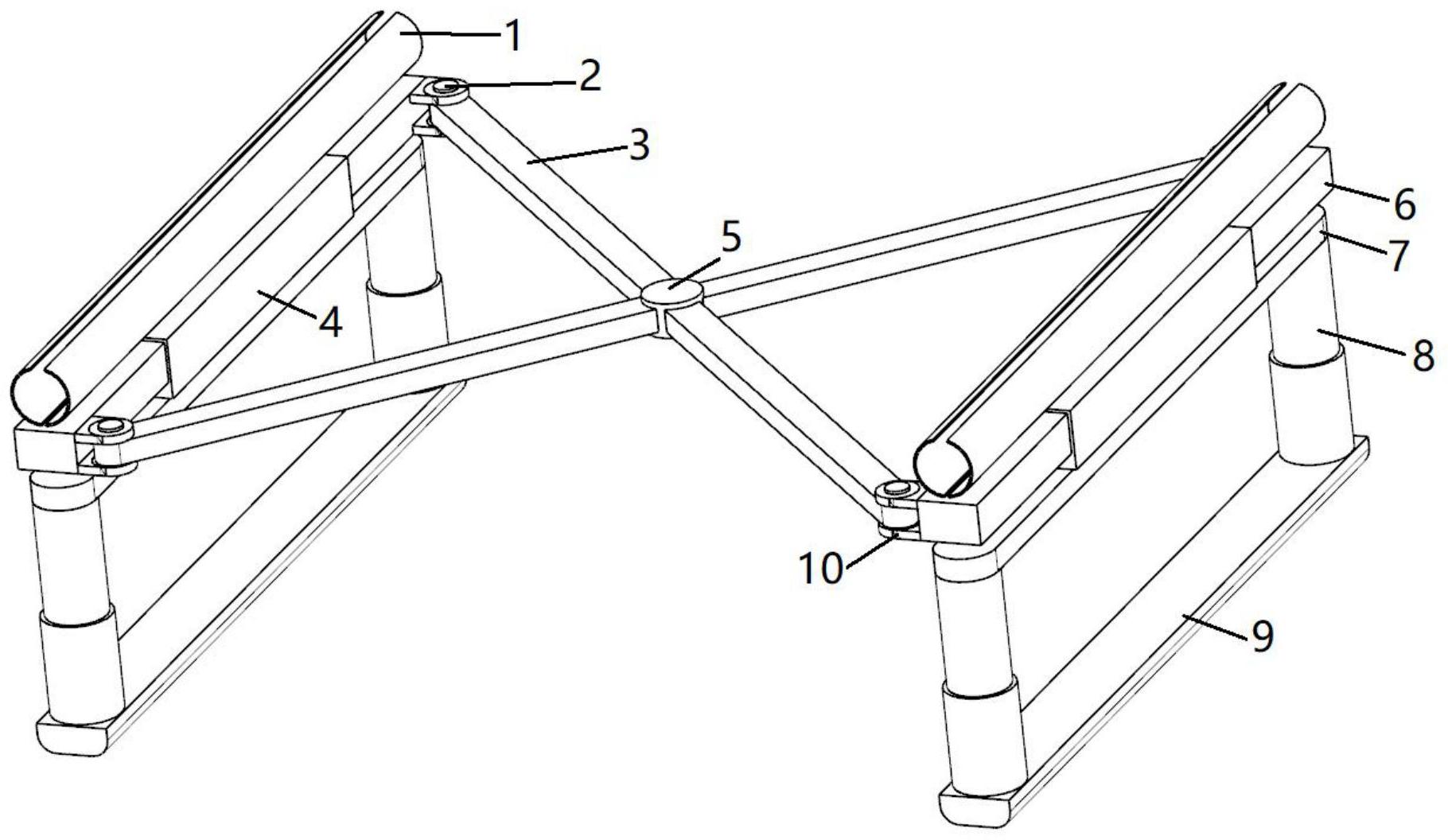
针对现有技术存在的问题,本发明提供了一种无人机用起落架减震控制系统及方 法。 本发明是这样实现的,一种无人机用起落架减震控制方法,所述无人机用起落架 减震控制方法无人机降落时达到六维度传感器和水平感应器的感应下限值;六维度传感器 和水平感应器对无人机的角度变化和水平倾斜角度进行采集;处理器内通过设定有不同角 度和角度倾斜时的减震器运行强度,设置有对应的数值;通过加速度传感器对无人机的加 速度进行收集,为正则启动增强信号,为负则启动减弱信号;减震器通过收到减震器的信 号,增强信号则在对应数值上提高减震器的强度,减弱信号则在对应数值上降低减震器的 强度; 无人机底座的宽度调整量斜撑的角度,使两卡环的宽度与无人机底座的宽度一 致,将无人机的起落架放置于卡环内;无人机降落时,第二支架和伸缩支腿起到双重缓冲减 震的作用; 所述处理器对六维度传感器和水平感应器的采集信号进行非线性变换,并计算其 广义循环自相关函数;提取广义循环自相关函数的特定循环频率截面,并通过搜索特定循 环频率截面的谱峰完成采集信号的有用符号长度估计; 5 CN 111572760 A 说 明 书 2/6 页 所述广义循环自相关函数 定义为: 其中,υ表示循环频率,m表示时延,Nr表示信号长度,”*”表示共轭运算,f[r(n)]为 非线性变换,其表达式为: 其中,r(n)为接收信号; 所述提取广义循环自相关函数的特定循环频率截面,并通过搜索特定循环频率截 面的谱峰完成采集信号的有用符号长度估计:估计有用符号持续时间就是估计使 为最大的m的估计值 为有用符号持续时间, 是有用符号长 度Nu的估计值;m∈[2Kmin,2Kmax],Kmin为可能的最少子载波数,Kmax是可能的最大子载波数, 有用符号持续时间估计为: 所述处理器利用多半径减法聚类和自校正的聚类有效性函数对简化的星座图的 概率密度函数进行处理,识别出采集信号的调制阶数;所述网格法估计星座图的概率密度 函数的方法为:根据接收到的星座点ri的坐标为(riI,riQ),构造方形网格,网格的边界由横 纵坐标绝对值的最大值决定,rI,rQ=±max(riI,riQ);定义网格密度Meshnum为单一方向上 划分的网格数,在确定的区域内划分Meshnum*Meshnum的网格图,每个网格大小为 将网格等效成xOy坐标平面,其中(xp,yp)为每个网格的中心, 函数值为 将离散点连续化后,得到估计出的概率密度函 数 进一步,所述处理器通过获取多径,提取首径到达的采集符号,接收信号的时域初 同步参数估计:利用DVB-T信号中时域符号的循环前缀特性,取NCP个采样值与NFFT之后的NCP 个采样值进行相关操作,获取相关峰值,得到符号开始采样值,为初定时同步值,以及分数 载波频率的初估计;根据分数载波频率的初估计结果,对采样信号进行频率补偿;根据初符 号定时同步估计结果,获取符号开始采样值,进行快速傅立叶变换,得到对应的频率信号; 检测并获取频域信号的离散导频序列:通过接收信号的离散导频信号分别与接收机本地产 生的多种不同的离散导频序列进行相关,检测得到当前符号的离散导频序列;检测接收信 号中OFDM符号的整数倍载波频偏估计并补偿。 6 CN 111572760 A 说 明 书 3/6 页 进一步,所述处理器数字调制信号x(t)的分数低阶模糊函数表示为: 其中,τ为时延偏移,f为多普勒频移,0<a,b<α/2,x*(t)表示x(t)的共轭;当x(t) 为实信号时,x(t)<p>=|x(t)|<p>sgn(x(t));当x(t)为复信号时,[x(t)]<p>=|x(t)|p-1x* (t)。 本发明的另一目的在于提供一种运行所述无人机用起落架减震控制方法的无人 机用起落架减震控制系统,所述无人机用起落架减震控制系统包括:包括减震模块、感应模 块和调控模块; 减震模块包括依次连接的减震器和电磁感应开关;所述感应模块包括六维度传感 器、加速度传感器和水平感应器;所述感应模块连接调控模块;所述调控模块包括信号传输 线和处理器;所述处理器通过一信号传输线连接加速度传感器,通过另一信号传输线连接 电磁感应开关;所述六维度传感器和水平感应器均设置有一个感应下限值和感应上限值; 所述加速度传感器连接有增强信号通道和减弱信号通道,所述减震器包括外箱,外箱内设 置有活塞杆,所述外箱内活塞杆上设置有阻尼器组件和减震垫;所述伸缩支腿的一端设置 有调节器;所述调节器和电磁感应开关连接。 进一步,所述减震模块设置有: 斜撑; 两个斜撑中部通过转轴转动连接,所述斜撑两端开设有通孔;所述通孔通过销轴 与连接板转动连接,所述连接板一侧固定设置有内杆,所述内杆外侧套接有外杆,所述外杆 上侧一体化设置有卡环,所述外杆下侧通过焊接有第一支架,所述第一支架两端下部设置 有伸缩支腿,所述伸缩支腿下部设置有第二支架。 进一步,所述连接板固定于内杆一端内侧,设置有上下两块,所述两块连接板中部 开设有通孔,两块连接板之间通过销轴与斜撑转动连接。 进一步,所述伸缩支腿设置有外筒,外筒内部滑动连接有内筒,所述外筒底部和内 筒上部均设置有固定块,所述固定块之间设置有弹簧。 进一步,所述第二支架为橡胶材质,且底部设置有防滑纹。 进一步,所述卡环为圆筒状,上部开设有开口。 进一步,所述第一支架与第二支架平行设置,所述伸缩支腿垂直于第一支架与第 二支架。 结合上述的所有技术方案,本发明所具备的优点及积极效果为:本发明通过设置 的内杆、外杆和斜撑,能够根据无人机起落架的宽度进行调节,具有更好的适用性;且本发 明通过设置的第二支架和伸缩支腿能够起到双重缓冲减震的作用,防止无人机在降落时受 到较大的冲击。本发明通过连接板实现了与斜撑的转动连接,且通过销轴进行固定,结构稳 定。本发明在伸缩腿内部设置的弹簧能够起到缓冲减震的作用,防止无人机在降落时受到 较大的冲击。本发明的第二支架为橡胶材质,进一步增加了本发明缓冲减震的效果。本发明 通过欧设置卡环,能够与无人机起落架固定连接。 7 CN 111572760 A 说 明 书 4/6 页 附图说明 为了更清楚地说明本申请实施例的技术方案,下面将对本申请实施例中所需要使 用的附图做简单的介绍,显而易见地,下面所描述的附图仅仅是本申请的一些实施例,对于 本领域普通技术人员来讲,在不付出创造性劳动的前提下还可以根据这些附图获得其他的 附图。 图1是本发明实施例提供的无人机用起落架减震控制系统的结构示意图; 图2是本发明实施例提供的无人机用起落架减震控制系统的另一侧结构示意图; 图3是本发明实施例提供的连接板的结构示意图; 图4是本发明实施例提供的伸缩支腿的结构示意图; 图中:1、卡环;2、销轴;3、斜撑;4、外杆;5、转轴;6、内杆;7、第一支架;8、伸缩支腿; 9、第二支架;10、连接板;11、内筒;12、弹簧;13、固定块;14、外筒。











