
技术摘要:
本发明主要提供了一种车辆实时定位方法,主要包括:根据地图信息获取特征真值数据库;所述的地图为全局地图数据,为点云地图获取周围信息得到特征位置信息;根据特征位置信息的属性在特征真值数据库中查找得到定位特征位置;将定位特征位置进行位置姿态解算得到解算位 全部
背景技术:
: 本发明涉及定位技术领域,主要用于无人车的实时定位,适用于包含但不仅限于 卫星定位时好时坏的各种情况。 无人车作为一种新兴的智能化工具,是集多种技术为一体的系统工程的应用案 例,其需要在自身定位、环境感知的基础上,实现行驶路径的规划和车辆运动的控制,所以 能够在多种路况下的定位十分重要。通常定位技术会使用卫星和IMU的组合来实现定位,因 为其位置的确定主要源于卫星,在一些卫星定位较差的场景下,会出现定位的偏移。无人车 的操作要求其感知定位结果尽可能准确,必要时可以冗余,这就要求各种场景下的定位结 果能够可靠。所以本发明在现有定位基础上加入地图和距离传感器件如激光、摄像头,来进 一步增加全局和局部定位信息量,一方面提供冗余,另一方面意欲在卫星定位差的时候使 用类似卫星和IMU结合的方式实现定位。 定位技术中主要涉及的内容包含全球定位系统、高精地图、蜂窝信号、WiFi等全局 定位信息来源,和惯性测量单元、激光雷达、摄像头(单目、双目、深度等)、磁钉磁条、超宽 带、RFID、红外线、蓝牙等局部定位信息来源。 专利:申请号2018113600098,是本领域中最接近本发明的实现方案,该发明主要 揭示了:车辆在感应到基站的情况下,采用卫星定位和捷联惯导组合的定位技术;车辆在未 感应到基站的情况下,采用激光雷达点云和高精度地图匹配的定位技术;在隧道或夜间外 界环境光线稳定的情况下,采用视觉里程算法的定位技术。所述方法克服了现有技术中的 自动驾驶定位方式保证提高自动驾驶定位精度的问题,实现了自动驾驶精确定位。但该发 明方案使用卫星定位作为全局数据,在卫星定位精度较差仅依赖局部信息定位,且局部信 息定位技术采用帧间匹配求位姿,此种定位方法存在累积误差,不适合长时间的无卫星定 位的情况,不然会导致偏差较大。
技术实现要素:
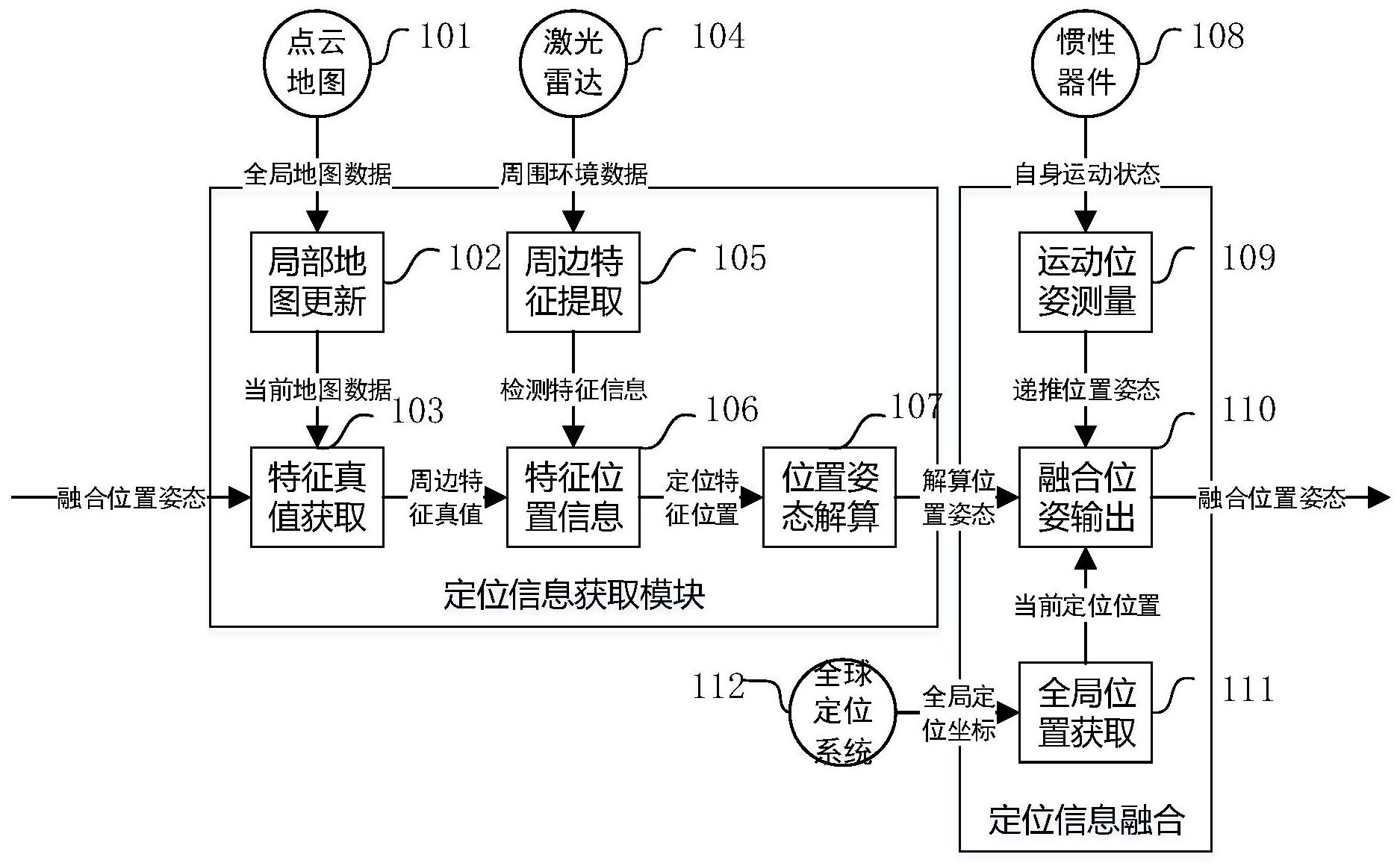
: 为了解决上述技术问题,提出了本申请。本申请的实施例提供了一种位姿信息确 定方法、装置、可移动设备、计算机程序产品和计算机可读存储介质,其可以高效准确地获 得可移动设备的位姿信息。 根据本申请的一个方面,提供了一种位姿信息确定方法,本发明主要提出了一种 车辆实时定位方法,其特征在于:根据地图信息获取特征真值数据库;所述的地图为全局地 图数据,为点云地图;获取周围信息得到特征位置信息;根据特征位置信息的属性在特征真 值数据库中查找得到定位特征位置;将定位特征位置进行位置姿态解算得到解算位姿姿 态;将GPS信息、车辆运动姿态及解算位姿姿态进行数据融合,输出融合位姿姿态。 优选的,本发明中的车辆实时定位方法,根据地图信息获取特征真值数据库,包括 3 CN 111551186 A 说 明 书 2/8 页 由所述的点云地图,其中的特征包括几何特征、者概率特征及语义特征。 优选的,本发明中的车辆实时定位方法,依据周围环境数据,由环境数据提取得到 特征位置信息,将特征位置信息作为检测特征信息。 优选的,周围环境数据,由环境数据提取得到特征位置信息,将特征位置信息作为 检测特征信息。 其中将所述的检测特征信息和点云地图中的特征真值进行特征类型匹配。 优选的,在将检测特征信息和点云地图中的特征真值进行特征类型匹配后,其中 匹配方法包括将检测特征信息转换为全局坐标系下,然后根据特征属性在周边特征真值构 成更多字典中查找值,得到校正的定位特征位置。 优选的,将检测特征信息和点云地图中的特征真值进行特征类型匹配。匹配方法 包括将检测特征信息转换为全局坐标系下,然后根据特征属性在周边特征真值构成更多字 典中查找值,得到校正的定位特征位置。 其中,通过定位特征位置,得到解算位置姿态,所述的解算位置姿态通过定位特征 位置中的静态特征点信息,通过三角定位计算静态特征点信息的当前全局位置及到达激光 雷达的相对位置,从而求解激光雷达的当前全局位置,并通过定位特征位置求得车辆的当 前位置。 优选的,GPS信息为卫星定位系统获取全局位置,并输出当前定位位置给融合位姿 输出模块。 优选的,车辆运动姿态通过车辆的惯性器件获取车辆的运动位姿测量,并计算得 到车辆位姿,并输出车辆位置姿态给融合位姿输出模块。 优选的,车辆实时定位方法,将GPS信息、车辆运动姿态及解算位姿姿态进行数据 融合包括将解算位置姿态作为测量值,利用卡尔曼滤波将GPS信息、车辆运动位置姿态及解 算位置姿态融合输出融合位置姿态。 本发明还涉及一种实现车辆实时定位系统,包括点云地图模块,该地图包含预定 义的所有语义数据,用于通过获取获取周边特征真值;激光雷达模块,用于获取周围环境数 据;惯性器件,用于获取自身运动状态;卫星定位模块,用于获取全局定位坐标;位姿融合模 块,将点云地图模块、激光雷达模块、惯性器件、卫星定位模块获得的数据信息经过处理之 后将数据融合,并输出精确的车辆位姿。 本发明提供了一种车辆,包括实现车辆实时定位系统,所述车辆定位系统用于测 量车辆的位姿,并输出车辆的位姿。 本发明的优点如下: 在没有卫星或者卫星定位精度差的情况下,以卫星作为全局定位信息来源可信度 低;本发明卫星定位精度差的情况下将融合高精地图的信息,获得不随时间变化的静态全 局信息,该信息用于自车位姿的推演,每次得到的最终位置会作为下一次定位处理的输入, 由于位置处于全局坐标系下,可以提高缺少卫星定位情况下的定位精度。 仅用激光和/或视觉进行局部定位,是通过每帧数据得到周围环境的特征,然后相 邻帧特征进行配准求位姿,得到的结果是在自车视角下看到的位姿变化,然后再进行累加, 得到类里程计信息,该方法的问题是长时间使用时累计误差较大;本发明得到自车周围的 静态信息,然后在高精地图进行查找,因为全局信息已知,所以查找速度快,得到了静态全 4 CN 111551186 A 说 明 书 3/8 页 局位置后,根据自车和静态全局位置的几何关系,推演出自车的全局位置信息,这里使用的 静态信息数量较少,有单次测量和搜索误差,不存在累计误差。 附图说明: 图1图示了根据本申请实施例一的车辆实时定位的流程图。 图2图示了根据本申请实施例实时定位方法的系统框图。 图3图示了根据本申请实施例二的车辆实施定位的流程图。 图4图示了根据本申请实施例三的车辆实施定位的流程图。











