
技术摘要:
本发明公开了一种测量光场分布的方法及装置。利用光阱稳定悬浮微粒,移动光阱使微粒靠近待测光场,利用光电探测器收集微粒在待测光场的三维空间中不同位置的散射光信号,根据散射光强与该位置的光强成正比解算出待测光场的光场分布。测量光场分布的装置,包括激光器、 全部
背景技术:
光束质量是评价激光束好坏的重要参数,直接影响激光器的应用范围和效率。光 束质量测量的关键在于测量光斑能量分布和确定激光束的束宽。常用的光场分布和束腰测 量方法有: (1)套孔法或小孔扫描法:出自国标《激光辐射光束直径测试方法》(GB/T137411992), 将孔径为r的光阑放在光路中,并使之略小于光斑半径ω,通过测量有无光阑时的能量比计 算透射率T: 根据透射率T,光斑半径表示为: 或者利用小孔探测到归一化的光强分布曲线,然后计算出该处的光斑半径。 (2)刀口法:出自国标《固体激光器测试方法》(GJB5441-2005),将刀口放置于激光 器及功率计(或能量计)之间的光轴上,刀口在一个机械平台上沿和光束垂直的x方向移动, 逐渐遮挡住输出光斑,进入功率计(或能量计)的功率(或能量)逐渐减小, 探测器测量出的 透射激光功率为刀口位置的函数。记录功率计(或能量计) 读数为原始功率(或能量)的84% 及16%时的对应几何位置x1及x2, 计算x方向的光束直径dx。 (3)CCD法:出自国标《固体激光器测试方法》(GJB5441-2005),将CCD探头垂直置于 光轴处,选择适当的衰减量,并充分利用CCD动态范围, 测量光束横截面的能量(或功率)强 度分布,然后按照光强分布的二阶矩计算光束直径。 (4)空心探针测量法:出自国标《工业用大功率激光器光束质量测试评定方法》 (GB/T246642009),借助于一个转动的能传输激光束的空心针而起作用。一定速电机带动一 空心探针,探针转动使微孔对光斑进行扫描。空心针一端的侧表面上开有一小孔,在探 针扫 过光束截面的瞬时过程中,由小孔进入的激光束通过内空腔被引导至转轴上,由此处 的探测器进行检测。转动系统在步进电机控制下可垂直于光束方向平动,随着整个探针支 架的平移,就能划出一系列弧线来,同时,高速采样系统对热电探测器输出的信号采样后送 入后续电路进行处理。采样过程在扫描光斑的瞬间完成。从而探测到光束横截面上的光强 3 CN 111551250 A 说 明 书 2/4 页 分布,由此扫描出整个光斑的功率密度分布情况。在测量不同强度和不同尺寸的光束时,可 选择不同微孔孔径的探针,同时调整平动步长,这样,即可满足测量非聚焦光束的要求,也 可以实现对聚焦光斑的测量。 上述各类方法的特点在于,对光场分布测量的空间分辨率受限于测量单元(小孔 或像素元)的尺寸。例如,套孔法、小孔扫描法和空心探针测量法的空间分辨率取决于小孔 的尺寸,一般测量聚焦光斑时,小孔的直径为15~50μm;测量非聚焦光束时,小孔直径为100~ 500μm;当小孔尺寸太小时,光学衍射效应会给测量结果带来较大误差,小孔的加工难度也 进一步增大;CCD法的空间分辨率取决于像素元的尺寸,通常也是微米量级。 因此这些方法的空间分辨率只能达到微米量级,对于高度聚焦光斑的光场分布, 尤其是束腰尺寸小于测量单元的光场,无法直接测量,故很难精确获得光场的三维光强分 布。
技术实现要素:
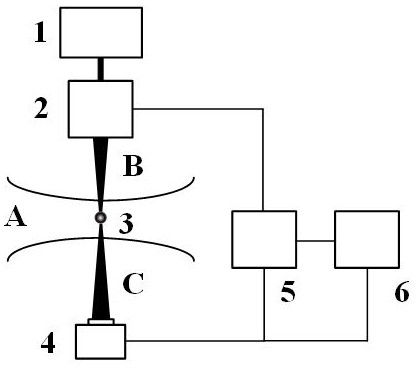
为了克服现有技术的不足,本发明提供一种测量光场分布的方法及装置。 一种测量光场分布的方法,利用光阱稳定悬浮微粒,移动光阱使微粒靠近待测光 场,利用光电探测器收集微粒在待测光场的三维空间中不同位置的散射光信号,根据散射 光强与该位置的光强成正比解算出待测光场的光场分布。 所述的光电探测器收集的信号为微粒对待测光场的散射光信号,不包含微粒对捕 获光场的散射光信号; 为了消除微粒对捕获光场的散射光信号对测量结果的影响,优先从与待测光场不一样 的波段中选取光阱捕获光场的波长;如果光阱捕获光场的波长与待测光场的波长相近时, 所述的待测光场的波长与光阱捕获光的波长一致时,在光电探测器前添加滤光片,滤除微 粒对捕获光的散射光;如果光阱捕获光场的波长与待测光场的波长相同时,使待测光场的 光束传播方向与光阱捕获光的传播方向成一定角度,并从捕获光的垂直方向收集微粒对待 测光场的散射光信号。 所述的光电探测器将微粒对待测光场的散射光的光强转化为与光强直接相关的 物理量,包括光强、光功率和亮度。 所述的微粒对待测光阱进行逐点扫描,对待测光场的测量空间分辨率等于扫描的 间隔长度。 一种采用所述的方法的测量光场分布的装置,包括激光器、捕获光路、微粒、光电 探测器、控制系统和上位机;激光器出射激光,经过捕获光路,出射高度聚焦的捕获光B,形 成光阱,捕获微粒;微粒在待测光场A中的某个位置,散射光C被光电探测器收集;光电探测 器将散射光信号上传到上位机;微粒和光电探测器的相对位置固定,控制系统同步控制微 粒和光电探测器的位置,使微粒对待测光场A进行逐点扫描;上位机根据不同位置处获取的 散射光信号解算出待测光场A的光场分布。 所述的光阱包括单光束光阱或双光束光阱。 所述的光电探测器可采用CCD、CMOS、光强计、光功率计、亮度计。 所述的控制系统的扫描步长决定了所述的装置测量光场的空间分辨率,达到纳米 量级。 4 CN 111551250 A 说 明 书 3/4 页 本发明的有益效果: 可精确获得光场的三维光强分布,将光场测量的空间分辨率提升到纳米量级。 附图说明 图1为本发明装置的一种结构示意图; 如图1所示,激光器1、捕获光路2、微粒3、光电探测器4、控制系统5和上位机6。











