
技术摘要:
本发明提供一种用于输电线路的无人机验电方法,其包含:在验电前的准备工作完毕后,远程控制无人机起飞,无人机垂直上升至预设高度并保持悬停状态,其中,预设高度基于待测输电线路的电压等级设置;对无人机进行机头定位操作,在机头定位过程中,无人机的机头左右摆动 全部
背景技术:
运行检修工作是掌握电网设备运行情况、及时发现和处理设备缺陷的重要手段。 《国家电网公司电力安全工作规程(电力线路部分)》明确规定:在停电线路工作地段装接地 线前,应先验电,验明线路确无电压。验电时,应使用相应电压等级、合格的接触式验电器。 对于无法进行直接验电的设备、高压直流输电设备和雨雪天气时的户外设备,可进行间接 验电。即通过设备的机械指示位置、电气指示、带电显示装置、仪表及各种遥测、遥信等信号 的变化来判断。判断时,应有两个及以上指示,且所有指示均已同时发生对应变化,才能确 认该设备已无电。根据实际使用需求,相关单位开发研制了接触式、非接触式验电器,并形 成了标准,详细情况如下: 目前,我国高/超高压输电线路均是使用接触式验电器进行验电,且已有相关标准 (IEC61243-1《带电作业用验电器用于交流1kV及以上电压的电容型验电器》、DL/T 740- 2014《电容型验电器》对接触式验电器的设计、制造、使用导则及试验方法进行了规范。各电 压等级接触式验电器使用的绝缘杆长度分别为:220kV为3m、330kV为5m、500kV为7 .2m, 500kV及以上电压等级若仍使用接触式验电器,线路杆塔高、塔头尺寸大、绝缘子串长以及 运行参数高等特点,另外相-地距离大,要求的绝缘操作杆具有较长的长度,这样一方面操 作杆的重量大,会极大的增加作业人员的劳动强度;另一方面较长的绝缘操作杆容易扰曲, 不便于操作。 因此,本发明提供了一种用于输电线路的无人机验电方法及装置。
技术实现要素:
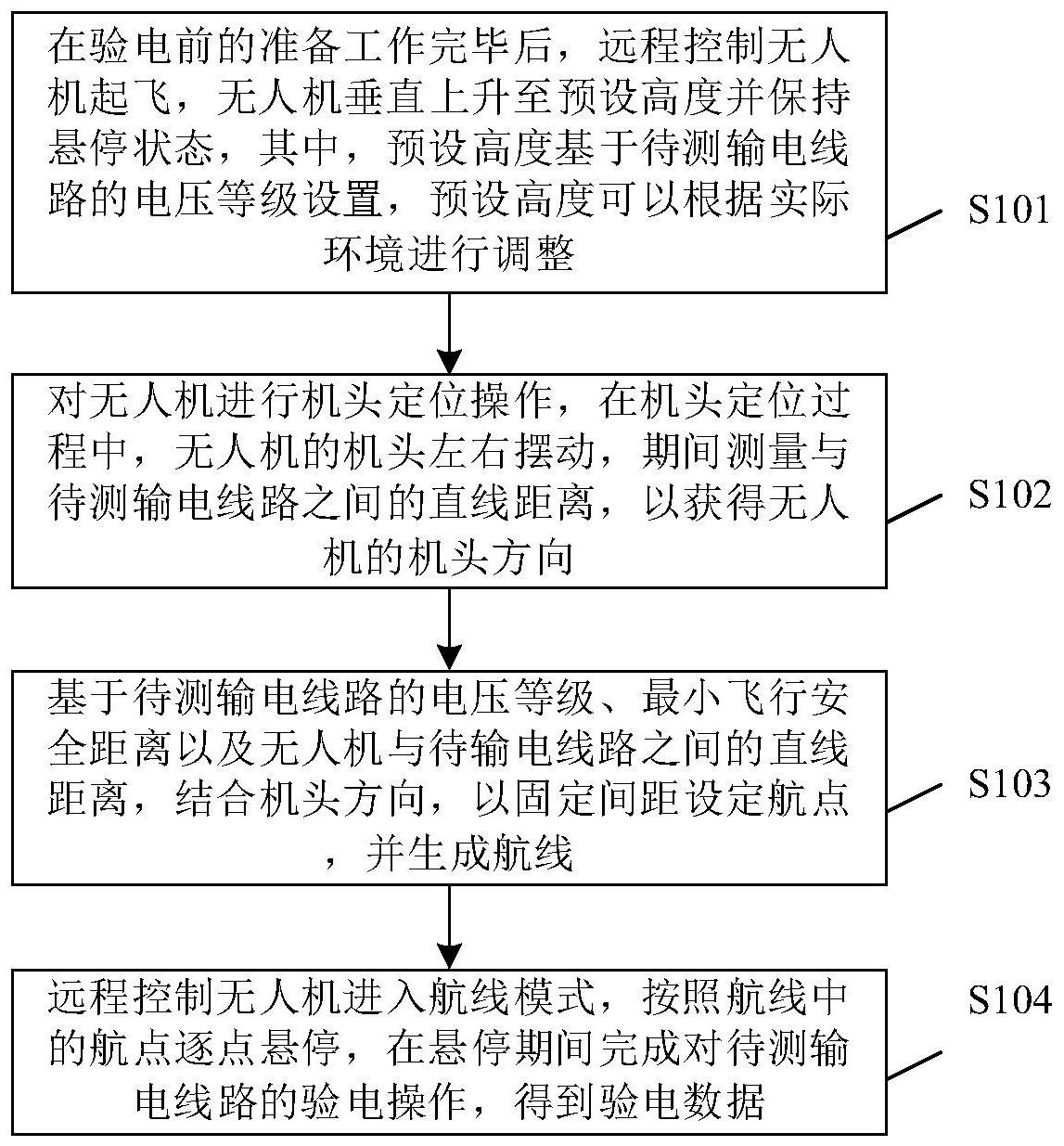
为解决上述问题,本发明提供了一种用于输电线路的无人机验电方法,所述方法 包含以下步骤: 在验电前的准备工作完毕后,远程控制所述无人机起飞,所述无人机垂直上升至 预设高度并保持悬停状态,其中,所述预设高度基于待测输电线路的电压等级设置,所述预 设高度可以根据实际环境进行调整; 对所述无人机进行机头定位操作,在机头定位过程中,所述无人机的机头左右摆 动,期间测量与所述待测输电线路之间的直线距离,以获得所述无人机的机头方向; 基于所述待测输电线路的电压等级、最小飞行安全距离以及所述无人机与所述待 输电线路之间的直线距离,以固定间距设定航点,并生成航线; 远程控制所述无人机进入航线模式,按照所述航线中的航点逐点悬停,在悬停期 间完成对所述待测输电线路的验电操作,得到验电数据。 根据本发明的一个实施例,所述准备工作具体包含以下步骤: 4 CN 111580531 A 说 明 书 2/8 页 在所述无人机的最大验电范围内,基于所述待测输电线路附近的地形特征,选取 所述无人机的摆放点,所述无人机的摆放姿态保持所述无人机的机头方向与所述待测输电 线路垂直。 根据本发明的一个实施例,获得所述无人机的机头方向的步骤中,具体包含以下 步骤: 在不同的机头摆动角度下,测量所述无人机与所述待测输电线路之间的直线距离 并同时记录航偏角,得到测距数据; 基于预设角度对所述测距数据进行筛选,得到可靠数据,其中,所述预设角度为所 述无人机所在的水平面与所述待测输电线路与所述无人机二者之间连线的夹角; 基于所述可靠数据计算得到所述机头方向。 根据本发明的一个实施例,基于所述最小安全飞行距离、所述无人机的初始摆放 位置、所述预设高度设置所述预设角度。 根据本发明的一个实施例,过滤掉所述预设角度之外的所述测距数据得到样本数 据,对所述样本数据中的任意两组数据做差,取差值最小的两组数据作为所述可靠数据。 根据本发明的一个实施例,在悬停期间完成对所述待测输电线路的验电操作,得 到验电数据的步骤中,具体包含以下步骤: 基于所述无人机上设置的验电设备采集所述待测输电线路的温度数据、湿度数 据、电磁场信息以及距离数据。 根据本发明的一个实施例,所述方法还包含: 以所述距离数据为横轴,分别以所述温度数据、所述湿度数据以及所述电磁场信 息为纵轴,分别绘制得到随距离变化的温度曲线、随距离变化的湿度曲线以及随距离变化 的电磁场曲线。 根据本发明的一个实施例,所述方法还包含: 筛选所述温度曲线、所述湿度曲线以及所述电磁场曲线中的所有数据点,当存在 数据点超出预设阈值时,发出告警。 根据本发明的一个实施例,所述方法还包含: 在生成所述航线前,识别并推送当前区域内的历史航线,若选择所述历史航线,所 述无人机按照所述历史航线完成所述验电操作。 根据本发明的另一个方面,还提供了一种用于输电线路的无人机验电装置,所述 装置包含: 上行模块,其用于在验电前的准备工作完毕后,远程控制所述无人机起飞,所述无 人机垂直上升至预设高度并保持悬停状态,其中,所述预设高度基于待测输电线路的电压 等级设置,所述预设高度可以根据实际环境进行调整; 定位模块,其用于对所述无人机进行机头定位操作,在机头定位过程中,所述无人 机的机头左右摆动,期间测量与所述待测输电线路之间的直线距离,以获得所述无人机的 机头方向; 航线模块,其用于基于所述待测输电线路的电压等级、最小飞行安全距离以及所 述无人机与所述待输电线路之间的直线距离,以固定间距设定航点,并生成航线; 验电模块,其用于远程控制所述无人机进入航线模式,按照所述航线中的航点逐 5 CN 111580531 A 说 明 书 3/8 页 点悬停,在悬停期间完成对所述待测输电线路的验电操作,得到验电数据。 本发明提供的用于输电线路的无人机验电方法及装置通过预设飞行高度并结合 现场实测,实现无人机验电飞行高度准确定位;能够根据不同的电压等级以及最小飞行安 全距离,结合机头方向及与待测输电线路的距离生成验电航电以及航线;并且,在同一区域 验电时,可自动匹配历史航线,一键式操作完成验电。本发明能够适应多种电压等级的待测 输电线路,也能够适应不同地形环境的验电现场,能够覆盖更广的验电场景。 本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变 得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在说明书、权利 要求书以及附图中所特别指出的结构来实现和获得。 附图说明 附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实 施例共同用于解释本发明,并不构成对本发明的限制。在附图中: 图1显示了根据本发明的一个实施例的用于输电线路的无人机验电方法流程图; 图2显示了根据本发明的一个实施例的确定机头方向的流程图; 图3显示了根据本发明的一个实施例的测距示意图; 图4显示了根据本发明的一个实施例的预设角度示意图; 图5显示了根据本发明的一个实施例的机头方向定位示意图; 图6显示了根据本发明的一个实施例的垂线在三角形中示意图; 图7显示了根据本发明的一个实施例的垂线在三角形右示意图; 图8显示了根据本发明的一个实施例的垂线在三角形左示意图; 图9显示了根据本发明的一个实施例的验电系统示意图; 图10显示了根据本发明的一个实施例的机头定位示意图; 图11显示了根据本发明的一个实施例的随距离变化的电磁场曲线;以及 图12显示了根据本发明的一个实施例的用于输电线路的无人机验电装置结构框 图。











