
技术摘要:
针对无人机机载合成孔径雷达回波数据中存在严重的运动误差,无法仅利用惯导系统进行高分辨成像的问题,本发明公开了一种用于无人机载SAR成像的运动补偿自聚焦方法与装置。本发明方法中提出一种改进的子孔径相关算法,在获得充足的距离空变信息条件下,比已有的子孔径相 全部
背景技术:
合成孔径雷达(Synthetic Aperture Radar,SAR)可在全天候条件下工作,采用宽 带信号获得高的距离分辨率,通过平台运动形成虚拟大孔径提高方位分辨率,最终实现高 分辨二维成像。合成孔径雷达成像要求平台运动矢量在合成孔径时间内是不变的,其中星 载合成孔径雷达通常满足要求,但机载合成孔径雷达尤其是无人机载合成孔径雷达由于受 到大气中不稳定的气流等因素影响,导致其运动平台偏离预定的航迹、天线相位中心偏移、 飞行姿态改变,即存在严重的运动误差。如何对无人机合成孔径雷达系统进行运动补偿是 无人机合成孔径雷达成像的一个关键技术。现今国外主流的合成孔径雷达运动补偿成像技 术主要利用高精度惯性导航系统和全球卫星定位系统来补偿载机和天线波束的平稳性,然 后再通过自聚焦成像算法处理即可得到相对理想的合成孔径雷达图像。而现在国内无人机 合成孔径雷达只能配备小体积轻便的低精度惯导系统,无法实现无人机载合成孔径雷达的 高精度运动补偿。此外,为突破敌方雷达防线,无人机经常采用低空飞行的手段,此时为获 取宽场景合成孔径雷达成像,雷达要以低俯仰角工作,必然导致运动误差存在很强的距离 空变性,进一步增加了高精度合成孔径雷达成像的难度。目前为了补偿机载合成孔径雷达 平台的运动误差,很多学者已经提出了一些运动补偿的方法。Bez v e s i l n i y等 [Bezvesilniy,O.O.,I.M.Gorovyi,and D.M.Vavriv."Estimation of Phase Errors in SAR Data by Local-Quadratic Map-Drift Autofocus ."International Radar Symposium 2012:376-381]提出了一种运动误差补偿方法,能够较好的补偿方位向的运动 误差,但是不能有效补偿距离向运动误差。而M.Xing等[M.Xing,X.Jiang,R.Wu,F.Zhou,and Z .Bao ,“Motion compensation forUAV SAR based on raw radar data ,”IEEE Trans.Geosci.Remote Sens.,vol.47,no.8,pp.2870–2883,Aug.2009]提出一种新的运动 补偿方法将方位向分成多个子孔径,再在各子孔径中将距离向分块,利用已有的子孔径相 关(Map-Drift,MD)算法估计局部的多普勒调频率(Doppler Rate,DR),能同时补偿方位向 和距离向的运动误差。但是其对距离向分块后,分别求出每个距离块的多普勒调频率,对各 多普勒调频率进行拟合,这样往往会带来很多问题。若距离向分块数量少,每块有足够多的 距离单元,用子孔径相关算法能够获得更精确的解,却不能提供足够的距离空变信息;分块 数量多时,虽然能提供足够的距离空变信息,但当子块中仅包含少量的特显点时,估计精度 难以保证。
技术实现要素:
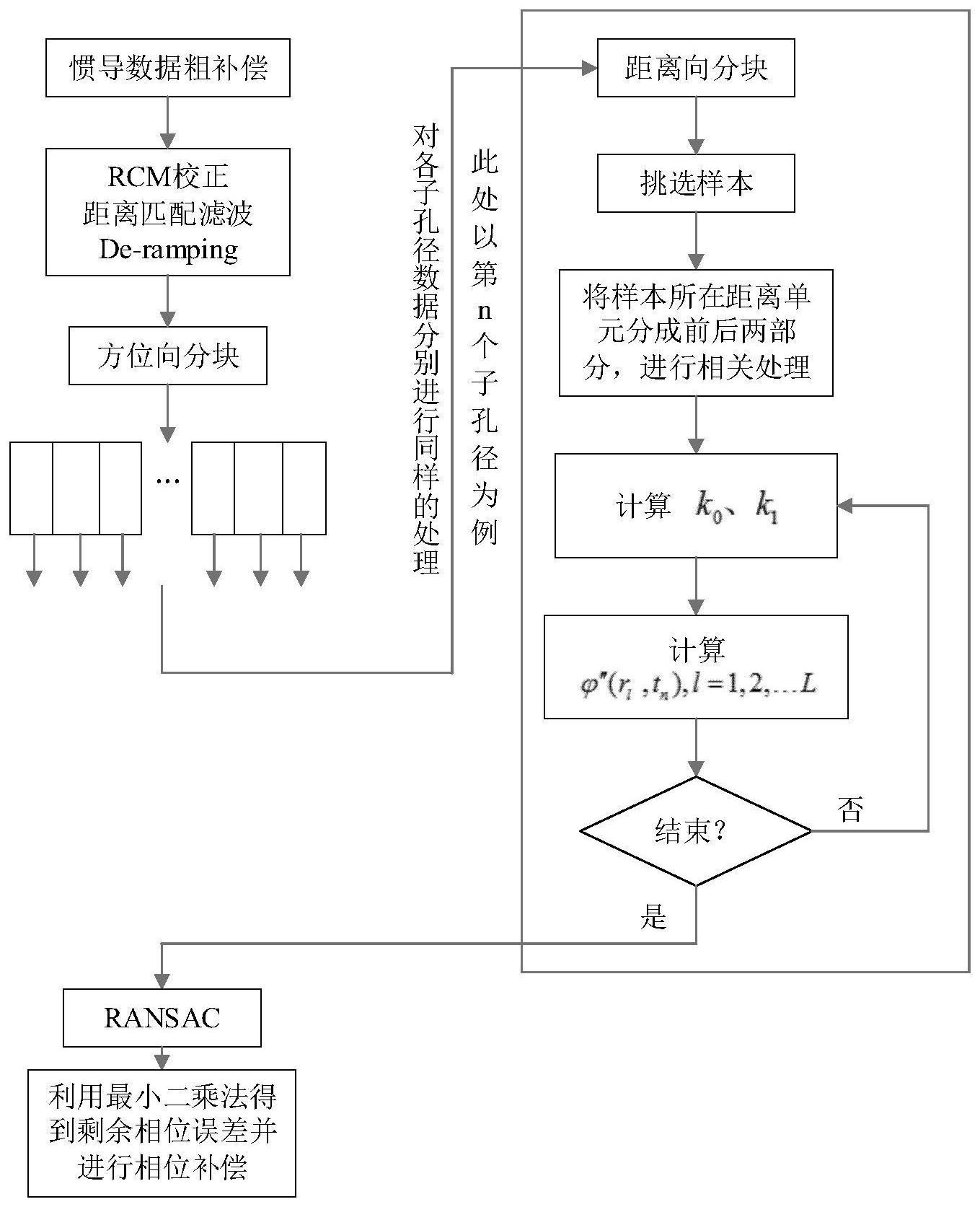
发明目的:针对上述现有技术中距离向分块数量问题,本发明目的在于基于已有 的子孔径相关算法,提出一种新的合成孔径雷达成像的运动补偿自聚焦方法与装置。本发 4 CN 111551934 A 说 明 书 2/9 页 明能够解决现有技术中难以同时获得良好的多普勒调频率估计精度和充足的距离空变信 息的问题,并有效抑制奇异点对成像结果的干扰,能够适用于无人机体积较小、无法携带高 精度惯导系统、合成孔径雷达回波数据中存在严重运动误差的合成孔径雷达成像。 技术方案:为实现上述发明目的,本发明所述的一种用于无人机载SAR成像的运动 补偿自聚焦方法,包括如下步骤: (1)在对接收到的回波信号利用惯导数据进行粗补偿、RCM校正、距离匹配滤波、 De-ramping操作后,对得到的具有剩余相位误差的信号进行方位向分块,得到各子孔径数 据; (2)对各子孔径进行距离向分块,在全部距离单元中挑选特显点样本; (3)将特显点样本所在距离单元分成前后两部分,进行相关处理,估计得到其所在 距离单元的二阶相位误差,基于二阶误差沿距离向的线性变化特性,利用特显点样本所在 距离单元的数据计算得到二阶相位误差系数,从而估计得到无特显点距离单元内的二阶误 差; (4)在得到了各距离单元各子孔径的剩余相位误差的二阶导数后,采用随机一致 性算法剔除异常值; (5)利用最小二乘法得到剩余相位误差并进行相位补偿,以改进合成孔径雷达成 像聚焦效果。 作为优选,所述步骤(3)中通过如下公式计算二阶相位误差系数: 其中, 为快时间,f表示多普勒频率,rk表示挑选出的第k个距离单元的斜距, 表示对第k个距离单元前后半段回波序列多普勒谱值做相关运算,K表示挑选出 有特显点的距离单元总数,|·|表示取绝对值运算。 作为优选,所述步骤(4)中采用随机一致性算法剔除异常值的包括: (4.1)将相位误差函数近似为Q(Q<N)阶多项式f(a0,a1,…aQ),N表示子孔径数,则 其二阶导数可表示为: 其中,t表示慢时间,aq为多项式f(a0,a1,…aQ)的q次项系数; (4.2)对应于N个子孔径,共有N个二阶导数 n=0,2...N-1,其中tn=(2n 1)Ts/2表示子孔径中心时间,在这N个点中,随机选择Q个作为内点,构成初始内点集,得到 其对应的多次项系数aq;设定阈值G,分别计算剩余的N-Q个点到该多项式曲线的距离,若某 点对应的距离小于阈值,则该点被认为内点,将其列入内点集; (4.3)统计内点集中内点个数; (4.4)重复S次步骤(4.2)和步骤(4.3),比较并选取内点最多的内点集; (4.5)内点最多的内点集中的所有内点即为有效值。 作为优选,重复次数S按照下式进行选取: 5 CN 111551934 A 说 明 书 3/9 页 其中,P为置信概率,ε为数据错误率。 基于相同的发明构思,本发明公开的一种用于无人机载SAR成像的运动补偿自聚 焦装置,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述计 算机程序被加载至处理器时实现所述的用于无人机载SAR成像的运动补偿自聚焦方法。 有益效果:本发明基于已有的子孔径相关算法,提出了一种新的用于无人机载SAR 成像的运动补偿自聚焦方法,将距离向分块后,在某一方位块的所有距离块中分别寻找相 同数目的特显点,并根据多普勒调频率在多普勒域与点目标斜距成线性关系的原理,通过 特显点所在的距离单元匹配出随距离线性变化的最优多普勒调频率分别作为该方位块各 距离门对应的多普勒调频率。这样操作解决了现有技术中难以同时获得良好的多普勒调频 率估计精度和充足的距离空变信息的问题。同时由于方位向分块可能导致子孔径中不含强 散射点或场景均匀导致估计产生奇异值,这会对成像结果产生影响,故本发明采用随机一 致性方法剔除奇异值并利用其余有效值来估计该距离门的多普勒调频率,进一步提高了多 普勒调频率的估计精度。 附图说明 图1为本发明实施例中距离空变的合成孔径雷达信号模型图。 图2为本发明实施例的方法流程图。 图3为仿真运动误差图。 图4为待处理图像,4(a)为原始图像,4(b)为加入运动误差后的散焦图像。 图5为已有方法距离向分4块的结果图,5(a)不剔除奇异值,5(b)剔除奇异值。 图6为已有方法距离向分128块的结果图。 图7改进的子孔径相关算法自聚焦图像,7(a)不剔除奇异值,7(b)剔除奇异值。 图8为原始图像局部放大图。 图9为自聚焦结果局部放大图。9(a)已有方法局部放大图,9(b)改进的子孔径相关 算法局部放大图。 图10为随距离向分块熵值变化情况结果图。











