
技术摘要:
本发明涉及一种机器人锁螺丝机,包括机械臂,机械臂的作业端上设有锁螺丝装置,锁螺丝装置包括驱动气缸,驱动气缸的伸缩端上设有电动螺丝刀,电动螺丝刀包括螺丝刀驱动部件、螺丝刀杆、螺丝刀披头,机械臂带动锁螺丝装置至设定的工位,螺钉输送装置将螺钉输送至螺丝刀 全部
背景技术:
锁螺丝机是通过输运装置实现螺丝的输送,通过电动部件实现螺丝杆带动批头拧 紧螺丝的装置。锁螺丝机采用机械设备来简化螺丝紧固工序,达到减少人工数量及减少工 人劳动强度,避免人工误操作带来返工、报废等问题。锁螺丝机的作业过程就是操作人员添 加螺钉,设备自动执行送螺丝、拧螺丝等工序,通常包括以下步骤:⑴开机检查设备状态以 及参数设置;(2)操作人员确定待加工件的位置,设备设置参数;⑶开机试运行,并检查成品 的效果、质量,确认加工过程稳定后,开始批量生产;⑷定期进行质量检查,确保性能稳定。
技术实现要素:
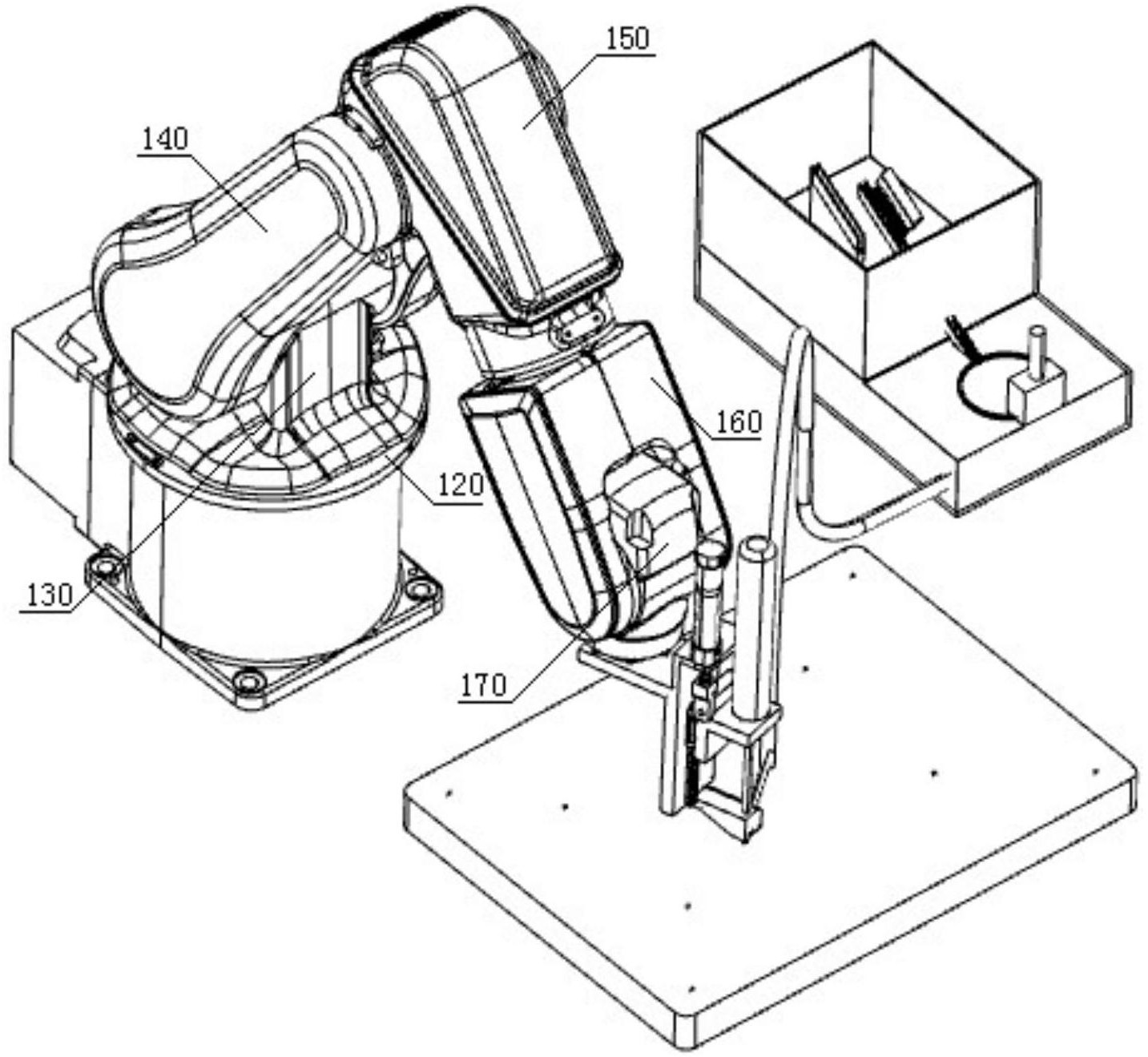
本发明机器人锁螺丝机公开了新的方案,采用多向调节机械臂与锁螺丝装置、螺 钉输送装置结合,解决了现有方案加工效率低的问题。 本发明机器人锁螺丝机包括机械臂,机械臂的作业端上设有锁螺丝装置,锁螺丝 装置包括驱动气缸,驱动气缸的伸缩端上设有电动螺丝刀,电动螺丝刀包括螺丝刀驱动部 件、螺丝刀杆、螺丝刀披头,机械臂带动锁螺丝装置至设定的工位,螺钉输送装置将螺钉输 送至螺丝刀披头前方的行程轨迹上,驱动气缸的伸缩端前伸带动螺丝刀披头压紧螺钉,螺 丝刀驱动部件驱动螺丝刀杆旋转带动螺丝刀披头拧紧螺钉。 进一步,本方案的锁螺丝装置还包括驱动气缸连接板,驱动气缸连接板包括直角 弯板A,直角弯板A的一端板上设有驱动气缸,直角弯板A的另一端板上设有机械臂连接支 板,机械臂连接支板与机械臂的作业端连接。 更进一步,本方案的直角弯板A的另一端板上设有驱动气缸伸缩端运行轨道,驱动 气缸的伸缩端沿驱动气缸伸缩端运行轨道前伸带动螺丝刀披头压紧螺钉。 再进一步,本方案的驱动气缸的伸缩端与直角弯板B的一端板固定连接,直角弯板 B的另一端板上设有电动螺丝刀,直角弯板B的一端板上设有滑块,滑块与驱动气缸伸缩端 运行轨道形成限位滑动连接,驱动气缸的伸缩端通过上述限位滑动连接沿驱动气缸伸缩端 运行轨道前伸带动螺丝刀披头压紧螺钉。 进一步,本方案的机械臂包括机械臂基座,机械臂基座上设有水平旋转基座盘,水 平旋转基座盘的盘面中部与基柱臂的下端固定连接,基柱臂的上端与一级悬臂的一端铰 接,一级悬臂的另一端与二级悬臂的一端铰接,二级悬臂的另一端通过转轴与三级悬臂的 一端轴向限位连接,三级悬臂的另一端与四级悬臂的一端铰接,四级悬臂的一端通过转轴 与锁螺丝装置轴向限位连接。 进一步,本方案的螺钉输送装置包括供钉机,供钉机包括供钉箱、气压送钉装置, 供钉箱内设有升降上钉滑道、向下倾斜的送钉滑道,送钉滑道的下端与环形旋转送料槽送 料连接,气压送钉装置包括高压吹嘴、螺钉输送管道,高压吹嘴设在螺钉输送管道的入口 4 CN 111546046 A 说 明 书 2/5 页 处,螺钉输送管道的入口与环形旋转送料槽送料连接,螺钉输送管道的出口设在螺丝刀披 头前方的行程轨迹处,升降上钉滑道上升将供钉箱内的螺钉向上输送至送钉滑道的上端, 螺钉沿送钉滑道向下滑入环形旋转送料槽,环形旋转送料槽旋转将螺钉输送至螺钉输送管 道的入口处,高压吹嘴利用高压气流将螺钉通过螺钉输送管道输送至螺丝刀披头前方的行 程轨迹上。 更进一步,本方案的供钉箱内还设有扫钉器,扫钉器包括扫钉驱动部件、扫钉毛 刷,扫钉毛刷的刷头设在送钉滑道的上端轨道上方,扫钉驱动部件驱动扫钉毛刷沿送钉滑 道往复运动将送钉滑道上的多余螺钉扫落。 更进一步,本方案的螺钉输送装置包括旋转送钉装置、设在直角弯板A的另一端板 与机械臂连接支板间的供钉箱,供钉箱内设有向下倾斜的送钉滑道,旋转送钉装置包括旋 转送钉圆盘,旋转送钉圆盘上设有驱动中心轴,旋转送钉圆盘的边沿外端上设有多个进钉 卡槽,驱动中心轴与送料驱动齿轮形成齿轮传动连接,送钉滑道的下端与旋转送钉圆盘送 料连接,机械臂通过上下振颤运动将供钉箱内的螺钉扬起落入送钉滑道,螺钉沿送钉滑道 向下运动滑入旋转送钉圆盘的进钉卡槽内,送料驱动齿轮通过上述齿轮传动连接驱动旋转 送钉圆盘旋转将螺钉输送至螺丝刀披头前方的行程轨迹上。 再进一步,本方案的送钉滑道的下方设有顶吹排孔,顶吹排孔向上喷射气流将送 钉滑道上的多余螺钉吹落。 又进一步,本方案的送钉滑道的中部的一侧滑轨上设有进钉挡板,进钉挡板遮挡 在送钉滑道中部的上方,进钉挡板避免多余的螺钉沿送钉滑道滑出供钉箱。 本发明机器人锁螺丝机采用多向调节机械臂与锁螺丝装置、螺钉输送装置结合, 具有加工效率高的特点。 附图说明 图1是机器人锁螺丝机实施例一的示意图。 图2是图1中机器人锁螺丝机的局部放大示意图。 图3是机器人锁螺丝机实施例二的示意图。 图4是图3中机器人锁螺丝机的局部放大示意图。 图5是图4中机器人锁螺丝机局部的内部结构示意图。 其中,120是水平旋转基座盘,130是基柱臂,140是一级悬臂,150是二级悬臂,160 是三级悬臂,170是四级悬臂,200是驱动气缸,210是驱动气缸连接板,211是机械臂连接支 板,300是电动螺丝刀,310是直角弯板B,410是供钉箱,401是送钉滑道,411是升降上钉滑 道,412是扫钉毛刷,421是顶吹排孔,422是进钉挡板,510是环形旋转送料槽,610是高压吹 嘴,620是螺钉输送管道,710是旋转送钉圆盘,711是驱动中心轴,712是进钉卡槽,810是送 料驱动齿轮。











