
技术摘要:
本发明提供一种智能船综合信息冗余监视系统,包括:机舱数据采集子系统、驾驶台数据采集子系统、数据接口子系统、数据网络服务子系统、船舶信息综合显示与处理子系统;通过下层分布式冗余现场CAN网络、中间层冗余全局CAN网络、以及上层冗余光纤以太网将上述5个子系统进 全部
背景技术:
随着科学技术发展,大型商船正朝向智能化、自主化方向迈进,必将带动一系列从 船舶设计、控制模式到基于数据支持的远程维护管理等方面的深度变革。出于应对运营成 本增长、船舶操作复杂化以及环保法规日趋严格的需求,近年来航运界不断增加对智能船 舶的技术投入。在大数据时代背景下,船舶智能化已经成为船舶制造与航运领域发展的必 然趋势。因而,船舶的智能化水平成为衡量舰船先进程度的一个重要标志。 智能船数据综合监视系统以大数据为基础,运用实时数据传输汇集,结合数据分 析、远程控制等信息化技术,实现船舶感知、分析和决策的智能化,从而提升船舶运行效率。 从设计阶段就开始进行智能船数据综合采集与监视系统的统筹设计,通过对船舶航行、姿 态、通导、主动力、电力、各辅助系统等数据进行集成,向船舶总控制器及岸上管理端提供数 据支持,能够辅助提高船舶的智能化程度,为进一步跨越到自主航行提供决策支持。 目前,国外已有多家厂商开发出综合监控的产品,如挪威Kongsberg Maritime的 k-chief 700机舱监控系统,德国SIEMENS公司的SISHIP SIENT集散网络监控系统,美国 Sperry的Sea-Net航行管理系统,意大利CS的MasterBridgeⅢ的综合驾控系统和丹麦 Lyngso的StellaNet船舶综合监控系统。 在国内,生产舰船监控产品的厂家主要集中在上海,有三进、驷博等较著名的公 司,其中有三进公司研制的CJBW100型系统,广州恒威电子科技有限公司研制的YTH-QJ801R 船用360°全景智能监控系统,但未曾见针对智能船设计的综合监视系统产品。 综上所述,这些产品的主要技术特点是使用计算机技术、网络技术和现场总线技 术不同程度地实现了船舶部分系统的分散监视,但一般都缺乏完善的上层PC网络和统一的 数据接口,不同监视系统间进行统一集成难度较大,还未形成全船数据综合监视与管理的 方案设计,并没有实现真正意义上的智能船舶综合数据监控。
技术实现要素:
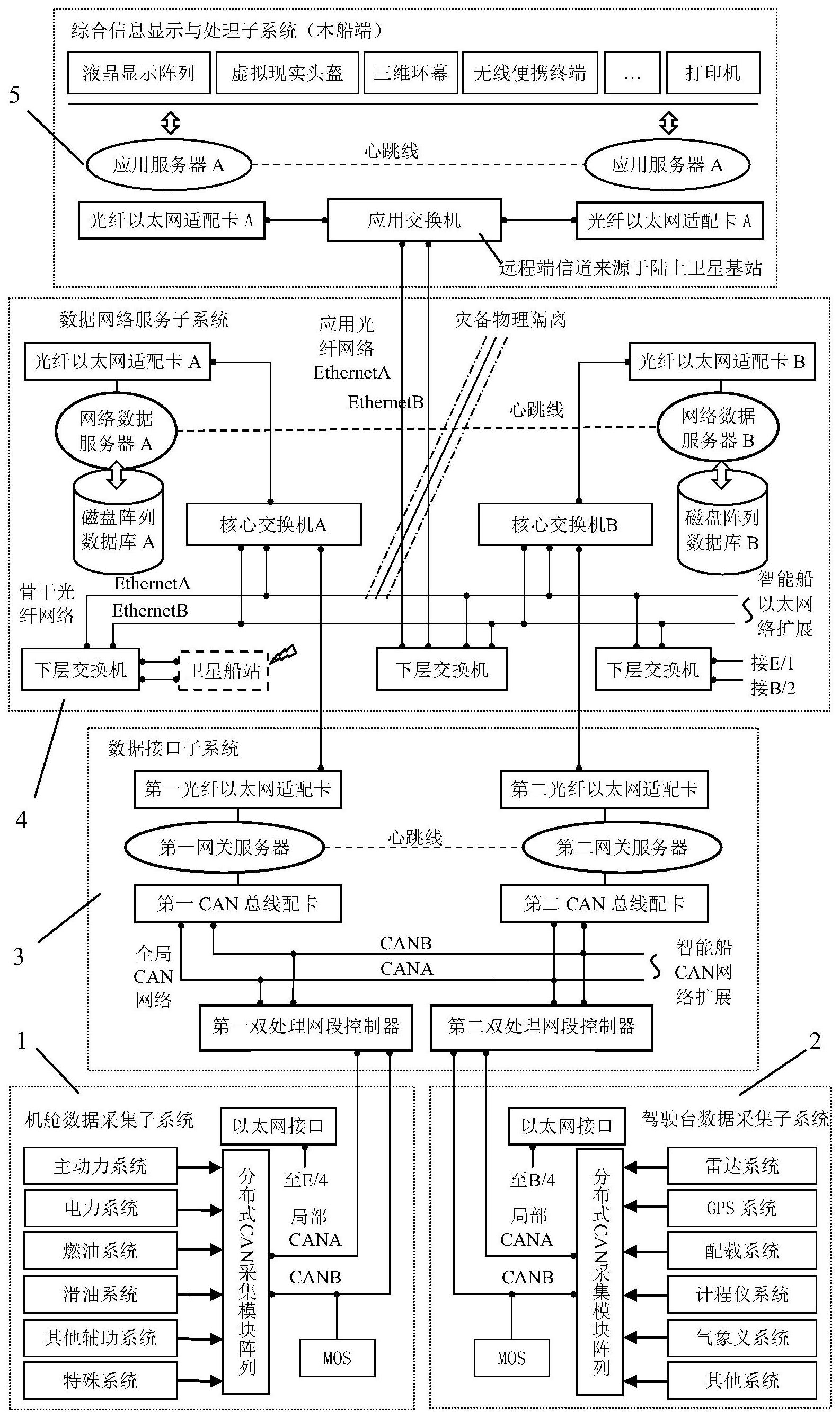
根据上述提出的技术问题,而提供一种智能船综合信息冗余监视系统。本发明主 要针对智能船提供一种数据综合数据冗余监视解决方案,在该方案的支持下更有效地对数 据进行冗余采集、冗余传输、冗余存储、冗余显示,面向无人船实现更科学合理的综合监控 与管理,从而在保障安全的前提下获得最好的经济效益和效率收益。 本发明采用的技术手段如下: 一种智能船综合信息冗余监视系统,包括:机舱数据采集子系统、驾驶台数据采集 子系统、数据接口子系统、数据网络服务子系统、船舶信息综合显示与处理子系统;通过下 层分布式冗余现场CAN网络、中间层冗余全局CAN网络、以及上层冗余光纤以太网将所述机 4 CN 111614502 A 说 明 书 2/8 页 舱数据采集子系统、驾驶台数据采集子系统、数据接口子系统、数据网络服务子系统、船舶 信息综合显示与处理子系统进行有机融合,构成整个智能船综合信息冗余监视系统; 所述机舱数据采集子系统和驾驶台数据采集子系统对船舶上的各个系统和设备 的数据进行统一采集,所述数据接口子系统将采集到的数据由底层向上层进行数据包协议 转换和传递,所述数据网络服务子系统接收由所述数据接口子系统传递的数据,并将数据 冗余存储在系统内部数据存储阵列;所述船舶信息综合显示与处理子系统通过与所述数据 网络服务子系统进行通信,实现数据的远程传输,并对收集到的数据进行可视化处理。 进一步地,所述机舱数据采集子系统采用分布式双冗余数据采集系统,机舱内各 CAN采集模块分布在与其相连的设备附近,构成分布式CAN采集模块阵列,并用双冗余CAN总 线相连,从而构成分布式机舱数据采集子系统; 所述机舱数据采集子系统用于对机舱所有系统及设备进行现场数据采集与转发, 所述机舱所有系统及设备在智能船中被整合为机舱机电大系统,机舱内所有监测点的数据 由传感器拾取、变送后统一发送给附近的分布式CAN采集板卡模块,再通过CAN总线传输到 所述数据接口子系统。 进一步地,所述驾驶台数据采集子系统采用分布式双冗余数据采集系统,驾驶台 各分布式CAN采集模块分布在与其相连的设备附近,构成分布式CAN采集模块阵列,并用双 冗余CAN总线相连,从而构成分布式驾驶台数据采集子系统; 所述驾驶台数据采集子系统用于对驾驶台所有系统及设备进行现场数据采集与 转发,所述驾驶台所有系统及设备在智能船中被整合为操纵与航行大系统,驾驶台所有监 测点的数据由传感器拾取、变送后统一发送给附近的分布式CAN采集板模块,再通过CAN总 线传输给数据接口子系统。 进一步地,所述数据接口子系统包括第一双处理网段控制器、第二双处理网段控 制器、第一CAN总线配卡、第二CAN总线配卡、第一网关服务器、第二网关服务器、第一光纤以 太网适配卡以及第二光纤以太网适配卡; 所述第一双处理网段控制器扩展所述机舱数据采集子系统的局部CAN总线到全局 CAN总线;再经第一CAN总线配卡进入第一网关服务器中进行数据包协议转换,再经第一光 纤以太网适配卡进入上层双冗余千兆光纤以太网; 所述第二双处理网段控制器扩展所述驾驶台数据采集子系统的局部CAN总线到全 局CAN总线;再经第二CAN总线配卡进入第二网关服务器中进行数据包协议转换,再经第二 光纤以太网适配卡进入上层双冗余千兆光纤以太网。 进一步地,所述数据网络服务子系统采用双系统灾备物理隔离、服务器热备冗余、 交换机链路冗余、线路链路冗余方式对下层现场采集的信息进行数据冗余存储、数据冗余 转发、数据查询。 进一步地,所述船舶信息综合显示与处理子系统包括本船端子系统和远程端子系 统; 所述本船端子系统是布置在智能船本船上的系统,用于船上管理者监控使用; 所述远程端子系统通过卫星网络布置,实现数据的远程传输; 所述本船端子系统和远程端子系统均可通过便携移动设备、虚拟现实设备、液晶 阵列的人机交互设备进行部署。 5 CN 111614502 A 说 明 书 3/8 页 进一步地,所述机舱数据采集子系统和驾驶台数据采集子系统还都可以通过专用 的便携式操作站MOS与现场CAN网络进行挂接,在机舱现场对各个分布式CAN数据采集模块 进行状态查询、参数调整和模块自检。 较现有技术相比,本发明具有以下优点: 1、本发明提供的智能船综合信息冗余监视系统,能够从底层到上层统一规范所有 智能船舶设备的通讯形式、收发方法;规定线路链路冗余方式;规定了设备的热备冗余方 式; 2、本发明提供的智能船综合信息冗余监视系统,利用机舱数据采集子系统、驾驶 台数据采集子系统对各类设备进行状态预测和报警检测。 3、本发明提供的智能船综合信息冗余监视系统,其船舶信息综合显示与处理子系 统的可视化图形界面可进行矢量化缩放,具有二维、三维图形显示接口,能够进行趋势图、 柱状图、饼状图、雷达图等多种形式的数据状态表现; 4、本发明提供的智能船综合信息冗余监视系统,不仅被授权的联网计算机可以根 据权限监视所被分配的信息,并且具有参数状态预测、报警功能,实现真正意义上的“智能 化船舶状态监视。 基于上述理由本发明可在智能船舶等领域广泛推广。 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现 有技术描述中所需要使用的附图做以简单地介绍,显而易见地,下面描述中的附图是本发 明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以 根据这些附图获得其他的附图。 图1为本发明系统总体结构图。 图2为本发明实施例提供的智能船综合信息组成结构框图。











