
技术摘要:
一种单向拉线式柔性假肢手指,包括假肢手指本体,假肢手指本体内部密封且能够充气;假肢手指本体上表面设置有驱动绳,假肢手指本体和驱动绳均由柔性材料制成,假肢手指本体的指尖处设置有固定点,驱动绳一端固定在固定点,另一端与电机相连;自然状态下假肢手指本体上 全部
背景技术:
由于意外事故或者先天原因,不少病患缺少部分或全部手指,因此需要假肢手指 的帮助。对于手指残缺较少的情况,例如只残缺一小节,现有的医用假肢手指还能起到一定 的实际作用;但如果残缺过多,则只能起到装饰美观作用,没有实际功能。另外有机械式、类 似于机器人的假肢手指,此类假肢使用连杆机构、蜗轮蜗杆、锥齿轮等复杂机械结构进行传 动与控制,质量重、不美观、人机交互差。
技术实现要素:
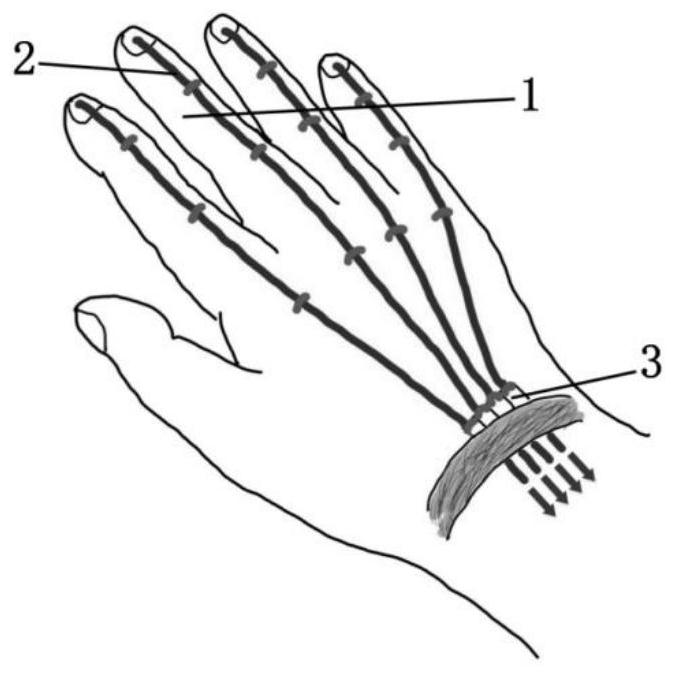
针对现有假肢手指的缺陷与不足,本发明的目的是提出了一种结构简单,实用性 强的单向拉线式柔性假肢手指。 为实现上述目的,本发明采用的技术方案如下: 一种单向拉线式柔性假肢手指,包括假肢手指本体,假肢手指本体内部密封且能 够充气;假肢手指本体上表面设置有驱动绳,假肢手指本体和驱动绳均由柔性材料制成,假 肢手指本体的指尖处设置有固定点,驱动绳一端固定在固定点,另一端与电机相连;自然状 态下假肢手指本体上表面长于下表面。 本发明进一步的改进在于,柔性材料为硅胶、橡胶、合成皮或牛皮。 本发明进一步的改进在于,假肢手指本体上表面设置有驱动绳导轨组件,驱动绳 通过在驱动绳导轨组件设置在假肢手指本体上表面。 本发明进一步的改进在于,假肢手指本体上设置有充气孔。 本发明进一步的改进在于,假肢手指本体包括相互独立的若干假肢手指。 本发明进一步的改进在于,驱动绳外部设置有保护层,假肢手指的指尖端部设置 有驱动绳承力点,驱动绳另一端通过驱动绳承力点与电机相连;保护层两端分别固定在固 定点和驱动绳承力点。 本发明进一步的改进在于,当电机不牵引时,驱动绳松弛,假肢手指在内部气压作 用下向手心弯曲;当电机单向牵引时,驱动绳被拉动,假肢手指伸直。 与现有技术相比,本发明具有的有益效果为: 1、本发明充分利用天然弯曲的特性,只需单个电机即可完成控制,结构简单、质量 轻、成本低。相对于使用复杂机械结构进行驱动的假肢手指,本发明结构简单、生产制造成 本低;利用手指结构天然弯曲的特性,只需单个电机进行单向拉动,即可控制手指运动;由 于手指默认状态是弯曲的,这意味这当患者需要连续抓握某件物品时并不需要电机持续工 作,这有利于保护电机、降低能耗。而且由于假肢手指内部是充气的,因此手指总质量很轻, 有良好的佩戴体验。 2、电机对驱动绳进行牵引时,不影响对物体的抓握。本发明仅在手指上表面设置 3 CN 111544164 A 说 明 书 2/3 页 驱动绳进行单向拉动,相对于下表面拉动或上下表面同时拉动方案,本发明的驱动方案不 会影响抓握等动作;下表面的驱动绳则会与物体发生干涉,影响抓握效果与功能;而且上下 表面同时拉动的方案需要更多的电机,增加成本以及控制的难度。 3、假肢手指是柔性的。柔性对于手指这种经常需要与环境发生交互的部位十分重 要。本发明手指结构是柔性的,驱动绳也是柔性的,柔性的充气手指在保护患者自身的同 时,也避免了对他人以及外界事物的伤害。 附图说明 图1为假肢手指手部总体结构。 图2为驱动绳放松时假肢手指自然状态。 图3为单向牵引驱动绳时假肢手指状态。 图4为假肢手指安装示意图。 图中,1为假肢手指,2为驱动绳,3为驱动绳承力点,4为手指上表面,5为密封充气 空腔,6为手指下表面,7为驱动绳导轨组件,8为驱动绳末端固定点,9为正常手指。











