
技术摘要:
本发明侧倾纵列双桨电动直升机,包括机身、两副旋翼、两个倾转机构、推进桨、电动机和操控系统等。两副旋翼的转动方向相反,旋翼通过调节旋翼转速来调节旋翼拉力,设置铰支座,每副旋翼可以被控制围绕着铰支座轴线向左侧及向右侧倾转,倾转受倾转机构控制;推进桨通过 全部
背景技术:
传统电动直升机是四旋翼直升机,操控系统操控四个旋翼的转速,水平飞行阻力 大,飞行效率低,飞行速度慢,抗侧风性能差。为了减小直升机水平飞行阻力,提高飞行效 率,提升飞行速度,提升抗侧风性能。本发明提出如下电动直升机结构,沿机身纵向轴线依 次设置两副旋翼,每副旋翼可以向左侧及向右侧倾转,倾转受倾转机构控制,设置了推进 桨。
技术实现要素:
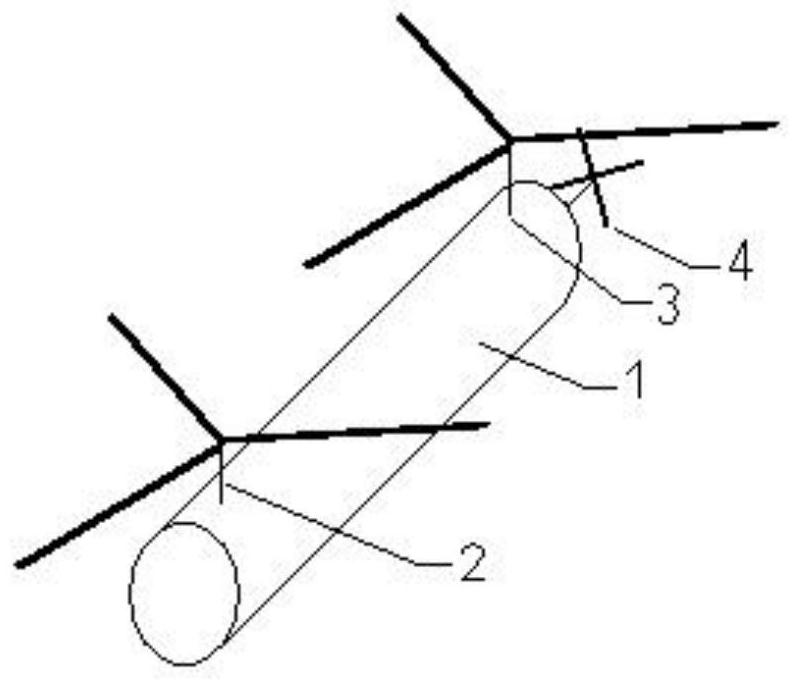
本发明侧倾纵列双桨电动直升机,包括机身、两副旋翼、两个倾转机构、推进桨、电 动机和操控系统等。 机身是承载电动直升机所有装置、机构和设备的机械结构,采用成熟技术。机身一 般是纵向的长柱体流线型。 两副旋翼沿机身纵向轴线一前一后设置于机身。旋翼包括旋翼轴、桨叶和铰支座, 均采用成熟技术。两副旋翼的转动方向相反。两旋翼轴之间的距离大于旋翼半径。旋翼通过 调节旋翼转速来调节旋翼拉力,调节采用成熟技术。设置铰支座,铰支座的固定部分与机身 相连接,铰支座的转动部分与旋翼轴轴承相连接,铰支座转动轴线平行于机身纵向轴线。每 副旋翼可以被控制围绕着铰支座轴线向左侧及向右侧倾转。倾转受倾转机构控制。 两个倾转机构分别控制两副旋翼倾转,均为电动控制机构,包括基座、伺服电机和 运动件,均采用成熟技术。基座与机身连接,运动件与被控制倾转的部件连接,伺服电机受 操控系统操控,能量来自电源。 推进桨是对机身产生向前及向后推进力的螺旋桨,包括推进桨轴、桨叶等,采用成 熟技术。推进桨通过调节正转及反转转速来调节推进力,调节采用成熟技术。推进桨设置位 置在机身头部或机身尾部。推进桨轴轴线平行于机身纵向轴线。 电动机为旋翼和推进桨提供动力,采用成熟技术。前旋翼与后旋翼各设置一个电 动机,电动机输出轴各与其旋翼轴连接。设置一个可以正转、停转和反转的电动机,其输出 轴与推进桨轴连接。电动机受操控系统操控,能量来自电源。 操控系统采用成熟技术操控五套电机,调节它们的转速,五套电机即前顶桨旋翼 电动机、前顶桨旋翼倾转机构伺服电机、后顶桨旋翼电动机、后顶桨旋翼倾转机构伺服电机 和推进桨电动机。 所述连接即通过连接机械使被连接的对象转速相同,例如通过胶结、螺栓连接、铆 接、机械咬合、联轴器连接等方式使被连接的对象转速相同,是成熟技术。所述旋翼和推进 桨各有螺旋桨、涵道式螺旋桨等种类,均是成熟技术。 3 CN 111572764 A 说 明 书 2/3 页 本发明电动直升机的飞行动作是:当推进桨不转动时,效果等同于未设置推进桨, 控制两副旋翼就可以使电动直升机实现除高速飞行外的各种飞行动作。两副旋翼不倾转且 同步调节旋翼拉力时,电动直升机升降。两副旋翼不倾转且异步调节旋翼拉力时,直升机俯 仰,在俯仰动作基础上电动直升机可向前及向后水平飞行。两副旋翼同步调增旋翼拉力且 各自向不同方向倾转时,电动直升机转向。两副旋翼同步调增旋翼拉力且向相同方向倾转 时,电动直升机滚转,在滚转动作基础上电动直升机可向左及向右水平飞行。当推进桨转动 时,两副旋翼不倾转,两副旋翼的前行桨叶各自为电动直升机提供升力所形成的滚转力矩 相互抵消平衡,电动直升机在推进桨推动下向前及向后水平高速飞行。各种动作可以叠加。 上述飞行动作基于两副旋翼都位于机身上方的前提,两副旋翼不是都位于机身上方时飞行 动作会有不同。 本发明侧倾纵列双桨电动直升机,其有益之处在于:提出沿机身纵向设置两副旋 翼,旋翼可以向左侧及向右侧倾转,倾转受倾转机构控制。由于旋翼倾转时旋翼拉力的水平 分力很大,电动直升机转向力矩很大,电动直升机转向快,机身前部可以快速指向侧风来 向,抗侧风性能好。提出纵列双桨结构,电动直升机纵向飞行时阻力小,比四旋翼电动直升 机水平飞行时飞行效率高,飞行速度快。提出设置推进桨,使得本发明电动直升机可以滚转 力矩平衡地高速飞行。 附图说明 图1为本发明实施例1示意图。图中1为机身,2前旋翼的旋翼轴,3为后旋翼的旋翼 轴,4为推进桨。 图2为本发明旋翼倾转示意图,图中1为机身中的纵向轴线,2为电动机,3为铰支 座,4为旋翼轴。 各图中各部件只示意相互关系,未反映实际形状尺寸。











