
技术摘要:
本发明涉及汽车控制技术领域,具体涉及一种自学习辅助驾驶方法。对车辆所处场景进行判断,场景包括天气、道路类别和拥堵状态;当用户为新用户或用户为老用户但选择重置自学习参数时,进行当前场景下的自学习过程,并在自学习过程结束后保存自学习结果,以及根据自学习 全部
背景技术:
随着汽车的普及,驾驶员对于驾驶体验、舒适性、安全性等方面要求的逐渐提升。 ADAS辅助驾驶系统也开始渐渐被广大用户熟悉,并开始逐渐普及。现有的辅助驾驶系统,由 于受限于成本,往往无法满足多元化的用户需求和复杂的道路场景。而辅助驾驶中的驾驶 参数也没有针对天气、道路拥堵状况、道路类别的不同而进行区分,而是采用相同的驾驶参 数进行辅助驾驶,其驾驶体验较差,且安全性低。 同时,所有的感知识别都依托于摄像头和毫米波雷达,但是摄像头识别受天气、光 线等影响很大,毫米波雷达对于雨天等状况的识别效果有限。因此,各种天气、道路拥堵状 况、道路类别都无法做到有效识别。 此外,目前市场上普遍存在的自动驾驶系统并未考虑不同驾驶员对驾驶感受的需 求,不能针对不同的驾驶习惯进行自主学习,也无法保存这些学习结果,无法给予用户定制 化享受。
技术实现要素:
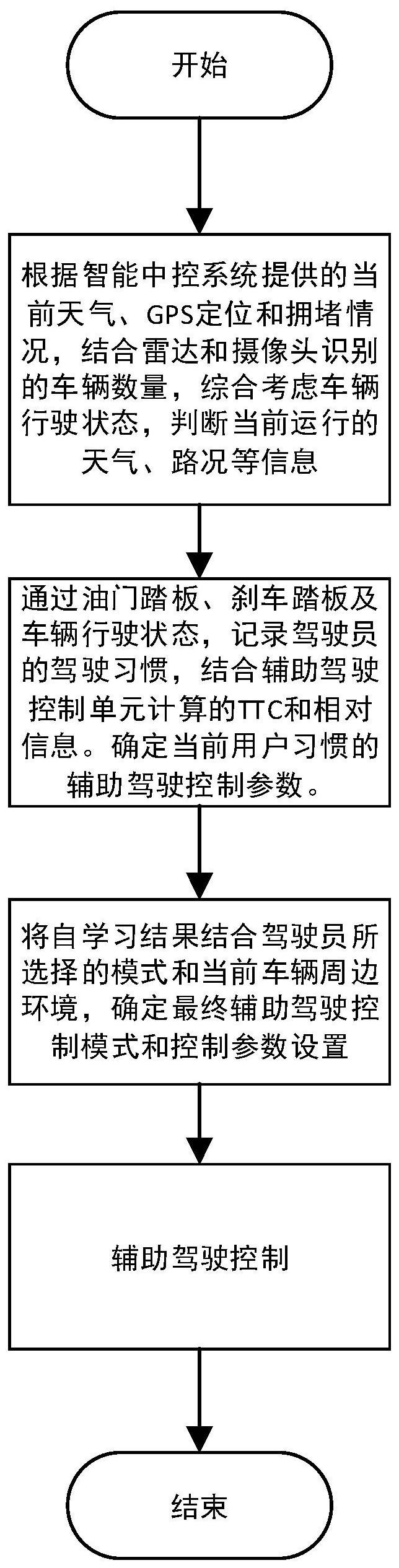
本发明的目的就是针对现有技术的缺陷,提供一种自学习辅助驾驶方法,它能根 据不同场景进行自学习以及辅助驾驶,提高驾驶的安全性。 本发明的技术方案为:对车辆所处场景进行判断,所述场景包括天气、道路类别和 拥堵状态; 当用户为新用户或用户为老用户但选择重置自学习参数时,进行当前场景下的自 学习过程,并在自学习过程结束后保存自学习结果,以及根据自学习结果内当前场景的驾 驶参数进行辅助驾驶控制; 当用户为老用户且未选择重置自学自参数时,根据当前场景从上次存储的自学习 结果中选择对应场景的驾驶参数进行辅助驾驶控制; 所述自学习过程为根据当前驾驶员的驾驶动作得到辅助驾驶所需的驾驶参数的 过程。 较为优选的,所述天气、道路类别和拥堵状态均包括多个种类,当一个场景的天 气、道路类别和拥堵状态中任意一个或多个的种类与另一个场景不同时,该场景与所述另 一个场景属于不同的场景; 对一个场景进行自学习,得到该场景下的驾驶参数后,其余场景下的驾驶参数均 通过修正的方式进行计算,所述当前场景下的驾驶参数和计算得到的其余场景下的驾驶参 数均属于本次自学习结果。 较为优选的,所述自学习结束后,直接将自学习得到的驾驶参数存储为自学习结 果,或 4 CN 111572555 A 说 明 书 2/6 页 设置多个驾驶风格,并对每个驾驶风格的驾驶参数进行预设,将自学习得到的驾 驶参数与各个驾驶风格预设的驾驶参数进行比对,将最接近的驾驶风格作为自学习结果; 所述将自学习得到的驾驶参数与各个驾驶风格预设的驾驶参数进行比对时,将驾 驶参数中的每个参数均分别与各驾驶风格预设的对应参数进行比对,得到驾驶参数中各参 数分别对应的驾驶风格。 较为优选的,所述驾驶参数包括跟车距离、跟车制动减速度、跟车加速度、起步价 速度、跟停距离和碰撞预警时机。 较为优选的,所述天气包括晴朗、雨天、夜晚和雪天,每种天气均对应一个场景系 数; 当其中一种天气下进行自学习得到驾驶参数后,同种道路类别和拥堵状态下其它 天气的驾驶参数均通过各场景系数之间的比例关系进行计算; 当车辆处于复合天气时,该复合天气对应的场景系数为组成该复合天气的各天气 的场景系数的乘积。 较为优选的,不同驾驶员自学习得到的自学习结果采用分组的方式进行存储,不 同的分组间采用不同编号或不同命名进行标识区分; 驾驶员可选择与自己对应的分组并利用该分组存储的驾驶参数进行辅助驾驶。 较为优选的,所述道路类别基于导航系统和车速进行判断; 当导航系统有效时,根据导航系统判断道路类别; 当导航系统失效时,根据车速判断道路类别; 其中当车速大于设定车速时,判断为高速或快速路,反之为城市路况; 当导航系统失效,且车速信息获取异常时,将道路类别按默认设置处理。 较为优选的,所述拥堵状况根据导航系统、雷达和摄像头进行识别,当导航系统与 雷达和摄像头识别的拥堵状况不一致时,对雷达和摄像头的判断标准进行修正。 较为优选的,所述天气通过光线传感器、前大灯、自动雨刮、雨量传感器中的一种 或多种进行判断。 较为优选的,当某场景下自学习得到的碰撞预警时机低于该场景下的默认设置, 则降低该场景下的默认设置; 当某场景下自学习得到的碰撞预警时机高于该场景下的默认设置,且在允许的安 全范围内,则将该自学习得到的碰撞预警时机数据作为该场景下自学习结果的有效数据。 本发明的有益效果为: 1、基于天气、道路类别和拥堵状态构成的不同场景进行自学习,能得到针对各种 场景的自学习参数(即自学习得到的驾驶参数),从而在辅助驾驶时,能够调用与所述场景 对应的驾驶参数进行驾驶,有效提高驾驶安全性。 2、不同的驾驶员可分组保存自己学习到的驾驶参数,使辅助驾驶时,能够满足不 同驾驶员的驾驶习惯,增强驾驶体验。 3、自学习结果提供两种保存形式,可根据车辆配置选择合适的保存方式,对于高 端车辆能够在自学习结束后提供更细致的驾驶参数,对于低端车辆,能够在满足车辆配置 的情况下,提供最接近当前场景和驾驶员习惯的驾驶参数,保证驾驶员的良好体验和驾驶 安全。 5 CN 111572555 A 说 明 书 3/6 页 4、在天气、道路类别和拥堵状态的获取中,有效利用导航系统、摄像头、雷达、自动 雨刮、雨量传感器、前大灯、光线传感器等部件,使各部件在获取数据时能相互弥补,保证数 据获取的准确性。 附图说明 图1为本发明一种自学习辅助驾驶方法的流程示意图; 图2为本发明自学习流程示意图; 图3为本发明自学习结果中其中一种存储方式的列表示意图; 图4为本发明自学习结果中另一种存储方式的列表示意图; 图5为本发明各驾驶风格下各驾驶参数示意; 图6为本发明系统架构示意图。











