
技术摘要:
本发明既减少车辆的行驶性能降低的可能性,又确保后退时的安全性。驱动力控制装置的控制器(10)在包括加速踏板处于操作状态的情况下档位变化了的条件在内的开始条件成立的时刻开始对操作驱动力施加限制的换档变更时抑制控制,在包括加速踏板处于操作状态且档位处于后退 全部
背景技术:
一直以来,公知有以避免车辆因驾驶员对加速踏板的误操作而突然加速或者突然 起步的情况的产生为目的而在操作驱动力过大的情况下对操作驱动力施加限制(抑制操作 驱动力)的驱动力控制装置。这样的控制称为驱动力抑制控制,包括换档变更时抑制控制以 及后退时抑制控制。 例如从加速踏板处于操作状态的情况下档位按照规定的模式变化的开始条件成 立的时刻起开始换档变更时抑制控制。换档变更时抑制控制例如在加速踏板处于非操作状 态时结束。根据换档变更时抑制控制,例如能够避免在驾驶员踏入加速踏板并误变更档位 的情况下车辆突然起步的情况的产生。 在加速踏板处于操作状态且档位位于后退位置的情况下执行后退时抑制控制。根 据后退时抑制控制,例如能够避免后退时驾驶员误深踏入加速踏板的情况下车辆突然加速 的情况的产生。 另外,存在车辆在泥泞路以及雪道等行驶的情况下卡陷的情况。在该情况下,驾驶 员尝试欲通过将加速踏板维持在操作状态并且在行进位置与后退位置之间频繁地变更档 位来使车辆从卡陷的场所逃出。在这样的情况下,若执行换档变更时抑制控制以及后退时 抑制控制,则存在施加于车辆的驱动力不足的可能性。 因此,对于现有的装置而言,在完成特定的操作的情况下,停止驱动力抑制控制, 或者减少驱动力抑制控制引起的操作驱动力的抑制的程度(即缓和对操作驱动力施加的限 制的程度)(例如参照专利文献1)。此外,在专利文献1中记载为:特定的操作是加速踏板的 操作以外的操作,且是表示驾驶员有加速意思的操作,例如包括用于使牵引力控制的功能 无效化的开关操作、用于使车辆举动稳定化控制(VSC)的功能无效化的开关操作、以及用于 将副变速器设定于低档侧的开关操作。 专利文献1:日本特开2014-088067号公报 然而,对于上述现有的装置而言,在检测到上述的特定的操作的情况下,减少换档 变更时抑制控制以及后退时抑制控制双方的抑制程度,因而例如存在如下担忧,即若车辆 从卡陷的场所逃出时档位为后退位置,则车辆朝向后方突然加速的担忧。
技术实现要素:
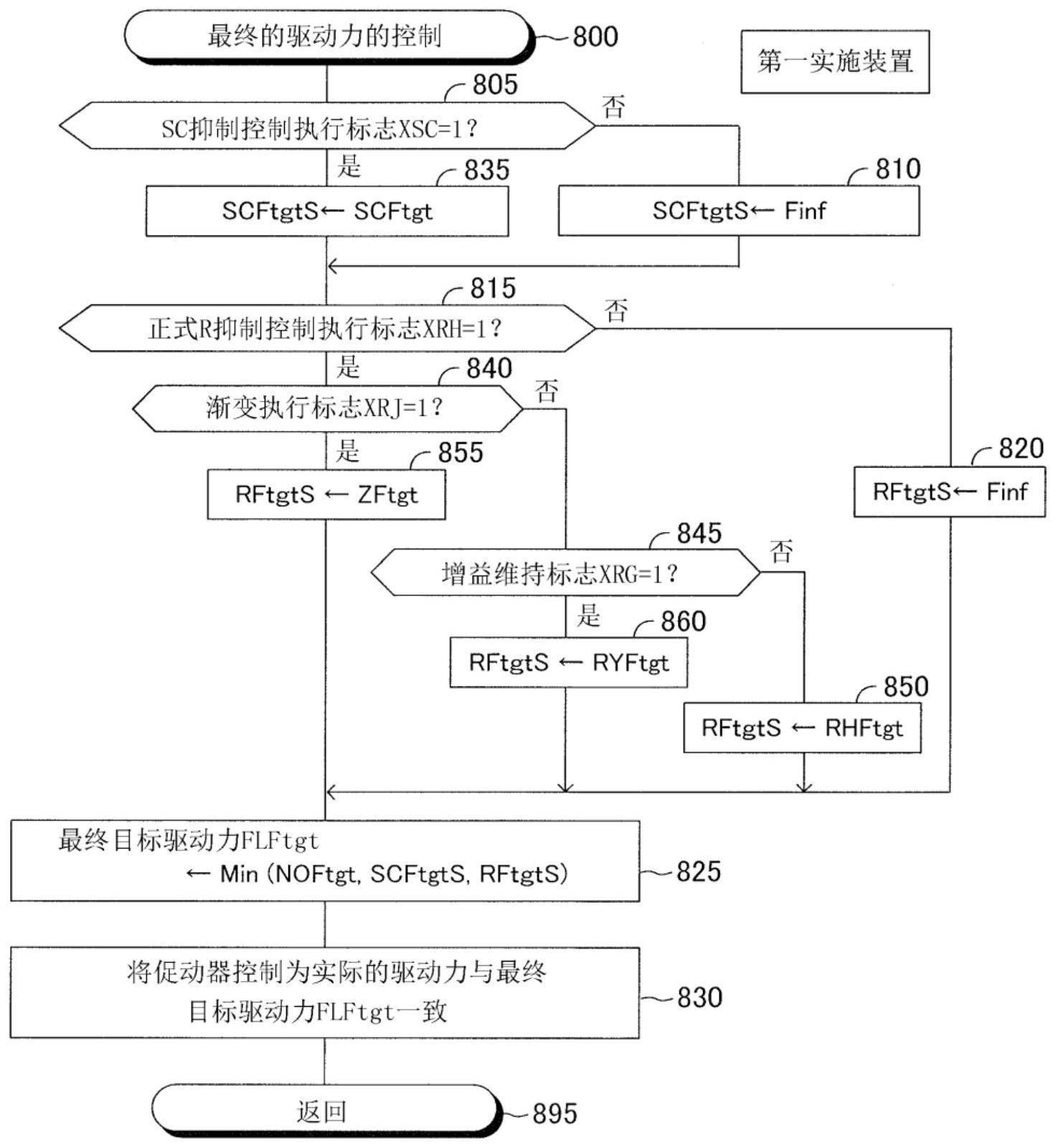
本发明是为了应用上述的问题而完成的。即,本发明的目的之一在于提供既减少 车辆的行驶性能降低的可能性、又能够确保后退时的安全性的驱动力控制装置。 本发明的驱动力控制装置(以下,亦称为“本发明装置”)具备: 驱动力产生装置(20),产生施加于车辆的驱动力;和 4 CN 111591282 A 说 明 书 2/19 页 控制器(10),通过控制上述驱动力产生装置(20)来控制上述驱动力。 上述控制器(10)构成为: 在开始条件(第一条件)成立的时刻开始换档变更时抑制控制,上述开始条件(第 一条件)包括上述车辆的加速踏板处于操作状态的情况下上述车辆的档位按照规定的模式 变化了的条件,所述规定的模式包括上述档位从后退位置以外的位置向该后退位置变化的 模式以及上述档位从行进位置以外的位置向该行进位置变化的模式,上述换档变更时抑制 控制使上述驱动力产生装置(20)产生通过施加避免基于上述加速踏板的操作量决定的操 作驱动力超过换档变更时目标驱动力(SCFtgt)的限制而获得的驱动力, 在执行条件(第三条件)成立的情况下执行后退时抑制控制,上述执行条件(第三 条件)包括上述加速踏板位于操作状态且上述档位位于上述后退位置的条件,上述后退时 抑制控制使上述驱动力产生装置(20)产生通过施加避免上述操作驱动力超过后退时目标 驱动力(RFtgt)的限制而获得的驱动力, 在执行上述换档变更时抑制控制的情况下,在由上述车辆的驾驶员完成了上述加 速踏板的操作以外的预先决定的特定的操作时,通过增大上述换档变更时目标驱动力 (SCFtgt)来缓和上述换档变更时抑制控制中的相对于上述操作驱动力的限制的程度,或者 停止上述换档变更时抑制控制,并且, 在执行上述后退时抑制控制的情况下,在由上述驾驶员完成了上述特定的操作 时,维持上述后退时抑制控制中的相对于上述操作驱动力的限制的程度。 根据本发明装置,在执行换档变更时抑制控制的情况下由车辆的驾驶员完成了特 定的操作时,缓和换档变更时抑制控制中的相对于操作驱动力的限制的程度或者停止换档 变更时抑制控制。因此,至少在“因档位按照从行进位置以外的位置向该行进位置变化的模 式变化而开始换档变更时抑制控制的情况”或者“因档位按照从后退位置以外的位置向该 后退位置变化的模式变化而开始换档变更时抑制控制的情况下缓和该控制中的相对于操 作驱动力的限制的程度的情况”下,与驾驶员不完成特定的操作就执行换档变更时抑制控 制的情况相比,能够获得较大的驱动力。因此,能够通过进行特定的操作来减少车辆的行驶 性能降低的可能性。 另一方面,根据本发明装置,在执行后退时抑制控制的情况下即便由驾驶员完成 了特定的操作,也维持后退时抑制控制中的相对于操作驱动力的限制的程度。除此之外, “在因档位按照从后退位置以外的位置向该后退位置变化的模式变化而开始换档变更时抑 制控制的情况下缓和该控制中的相对于操作驱动力的限制的程度的情况下”,虽然缓和相 对于操作驱动力的限制的程度,但执行相对于操作驱动力的限制本身。因此,在任何情况下 均能够减少后退时车辆突然加速或者突然起步的可能性,能够确保后退时的安全性。 因此,根据本发明装置,既减少车辆的行驶性能降低的可能性,又能够确保后退时 的安全性。 在本发明的一个侧面中, 上述控制器(10)构成为: 在执行上述换档变更时抑制控制以及上述后退时抑制控制双方的情况下,在完成 上述特定的操作时停止上述换档变更时抑制控制, 上述控制器(10)还构成为: 5 CN 111591282 A 说 明 书 3/19 页 将上述操作驱动力计算为目标操作驱动力(NOFtgt), 使用表示上述车辆的加速状态的参数计算上述换档变更时目标驱动力(SCFtgt), 使用上述参数计算上述后退时目标驱动力(RHFtgt), 在执行上述换档变更时抑制控制以及上述后退时抑制控制双方的情况下,从上述 目标操作驱动力(NOFtgt)、上述换档变更时目标驱动力(SCFtgt)以及上述后退时目标驱动 力(RHFtgt)中选择最小的驱动力作为最终目标驱动力(FLFtgt), 在完成了上述特定的操作的切换时刻,若上述后退时目标驱动力(RHFtgt)大于上 述换档变更时目标驱动力(SCFtgt),则计算从上述切换时刻的上述换档变更时目标驱动力 (SCFtgt)起随着时间的经过而渐渐增大的渐变目标驱动力(ZFtgt),选择在从上述切换时 刻至上述渐变目标驱动力(ZFtgt)达到使用上述参数依次计算的后退时目标驱动力 (RHFtgt)的达到时刻为止的期间上述目标操作驱动力(NOFtgt)以及上述渐变目标驱动力 (ZFtgt)中的更小的驱动力作为最终目标驱动力(FLFtgt), 选择在上述达到时刻以后上述目标操作驱动力(NOFtgt)以及使用上述参数依次 计算的后退时目标驱动力(RHFtgt)中的更小的驱动力作为最终目标驱动力(FLFtgt), 将上述驱动力产生装置(20)控制为上述驱动力产生装置(20)所产生的驱动力与 上述选择的最终目标驱动力(FLFtgt)一致。 “执行换档变更时抑制控制以及后退时抑制控制双方的情况”是指“因档位按照从 后退位置以外的位置向该后退位置变化的模式变化而开始换档变更时抑制控制,此后因持 续后退而后退时抑制控制的执行条件也成立的情况”。根据本发明的一个侧面的结构,在这 样的情况下完成了特定的操作时(切换时刻)停止换档变更时抑制控制,因而执行后退时抑 制控制。此时,在切换时刻,若“后退时目标驱动力>换档变更时目标驱动力”,则计算渐变 目标驱动力(从切换时刻的换档变更时目标驱动力起随着时间的经过而渐渐增大的驱动 力)。渐变目标驱动力被一直计算直至达到时刻(渐变目标驱动力达到“使用参数依次计算 的后退时目标驱动力(即最新的后退时目标驱动力)”的时刻)为止。因此,能够大幅度减少 在切换时刻因“后退时目标驱动力>换档变更时目标驱动力”导致最终目标驱动力从换档 变更时目标驱动力向后退时目标驱动力骤增的可能性。换言之,在从切换时刻至达到时刻 为止的期间,最终目标驱动力的增加平顺。其结果是,能够大幅度减少在切换时刻车辆突然 加速的可能性。 在本发明的一个侧面中, 上述控制器(10)构成为: 依照使用第一控制增益(K1SC、K2SC、K3SC)的反馈控制将为了使上述参数的实际 值(Ga)与在上述换档变更时抑制控制中计算的换档变更时目标参数(GtgtS)一致而应该施 加于上述车辆的驱动力计算为上述换档变更时目标驱动力(SCFtgt), 依照使用第二控制增益(K1R、K2R、K3R)的反馈控制将为了使上述参数的实际值 (Ga)与在上述后退时抑制控制中计算的后退时目标参数(GtgtR)一致而应该施加于上述车 辆的驱动力计算为上述后退时目标驱动力(RFtgt(RHFtgt)), 在上述切换时刻上述后退时目标驱动力(RFtgt(RHFtgt))为上述换档变更时目标 驱动力(SCFtgt)以下的情况下,在上述换档变更时目标参数(GtgtS)与上述后退时目标参 数(GtgtR)相互相等时,依照使用上述第一控制增益(K1SC、K2SC、K3SC)来代替上述第二控 6 CN 111591282 A 说 明 书 4/19 页 制增益(K1R、K2R、K3R)的反馈控制将在上述切换时刻以后为了使上述参数的实际值(Ga)与 上述后退时目标参数(GtgtR)一致而应该施加于上述车辆的驱动力计算为上述后退时目标 驱动力(RFtgt(RYFtgt))。 在切换时刻后退时目标驱动力为换档变更时目标驱动力以下的情况下,在换档变 更时目标参数与后退时目标参数相互相等时,若反馈控制的控制增益从第一控制增益切换 为第二控制增益,则存在车辆的驱动力大幅变动的担忧。与此相对,根据本发明的一个侧面 的结构,在切换时刻后退时目标驱动力为换档变更时目标驱动力以下的情况下,在换档变 更时目标参数与后退时目标参数相互相等时,依照使用第一控制增益来代替第二控制增益 的反馈控制计算后退时目标驱动力。因此,能够大幅度减少因控制增益的切换导致驱动力 大幅变动的可能性。 此外,在上述说明中,为了帮助发明的理解,相对于与实施方式对应的发明的结 构,加括号标注了在实施方式中使用的附图标记,但发明的各构成要件并不限定于由上述 附图标记规定的实施方式。 附图说明 图1是本发明的第一实施方式所涉及的驱动力控制装置(以下,亦称为“第一实施 装置”)的简要结构图。 图2A是表示规定车速与换档变更时目标加速度的关系的换档变更时目标加速度 查询表的图。 图2B是表示规定车速V与后退时目标加速度的关系的后退时目标加速度查询表的 图。 图3是表示第一实施装置的驱动力控制ECU的CPU为了计算目标驱动力而执行的例 程的流程图。 图4是表示第一实施装置的CPU为了设定换档变更时抑制控制执行标志而执行的 例程的流程图。 图5是表示第一实施装置的CPU为了设定正式R抑制控制执行标志为执行的例程的 流程图。 图6是表示第一实施装置的CPU为了设定渐变执行标志以及增益维持标志而执行 的例程的流程图。 图7是表示第一实施装置的CPU为了使目标驱动力渐变而执行的例程的流程图。 图8是表示第一实施装置的CPU为了控制最终的驱动力而执行的例程的流程图。 图9是表示本发明的第二实施方式所涉及的驱动力控制装置的驱动力控制ECU的 CPU为了控制最终的驱动力而执行的例程的流程图。 图10A是表示储存于本发明的第三实施方式所涉及的驱动力控制装置(以下,亦称 为“第三实施装置”)的、规定车速与换档变更时目标加速度的关系的换档变更时目标加速 度查询表的图。 图10B是表示规定车速与缓和换档变更时目标加速度的关系的缓和换档变更时目 标加速度查询表的图。 图10C是表示规定车速与后退时目标加速度的关系的后退时目标加速度查询表的 7 CN 111591282 A 说 明 书 5/19 页 图。 图11是表示第三实施装置的驱动力控制ECU的CPU为了计算目标驱动力而执行的 例程的流程图。 图12是表示第三实施装置的CPU为了设定换档变更时抑制控制执行标志而执行的 例程的流程图。 图13是表示第三实施装置的CPU为了控制最终的驱动力而执行的例程的流程图。 附图标记说明: 10:驱动力控制ECU;12:加速踏板操作量传感器;14:档位传感器;16:车速传感器; 18:TRC关闭开关;20:驱动力产生装置;21:促动器。











