
技术摘要:
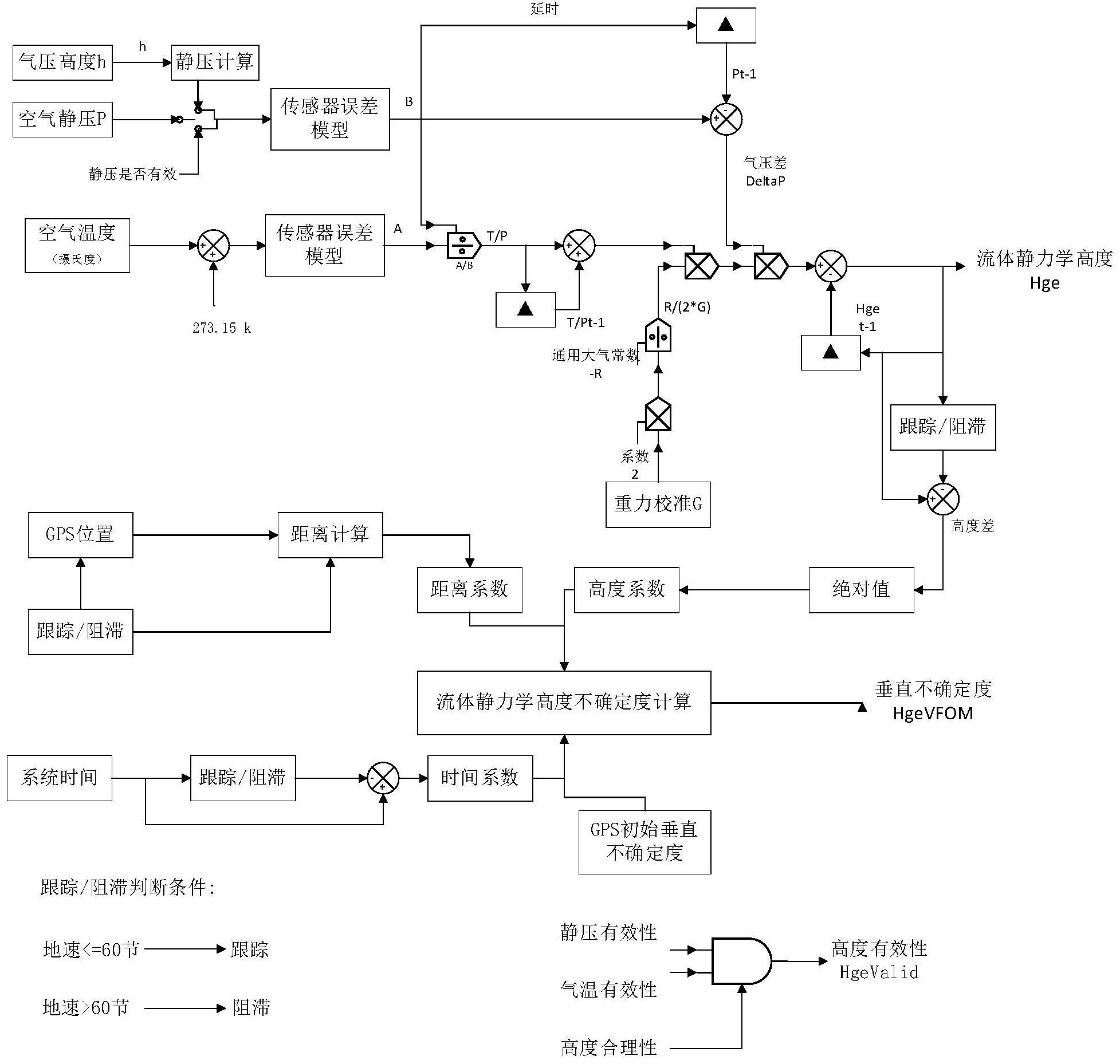
本发明公开了一种适用飞机几何高度的计算方法,利用流体静力学方程计算在当前时刻t时的飞机的几何高度Hge:其中:P为当前时刻t时的大气压强;T为当前时刻t时的大气温度;g为当前时刻t时的重力加速度;R为当前时刻t时的通用大气常数;Hgetl为上一时刻的Hge;Ptl为上一时 全部
背景技术:
地形感知与告警系统(TAWS)的目标是飞行器在多山区域和障碍物林立的环境中 飞行时,其以最小的虚警率工作的同时最大程度防止可控飞行撞地事故发生。该类设备的 一个重要功能是前视地形告警,典型工作场景见附图1。该功能根据接收到的载机经纬度、 气压高度和载机姿态等信息,依据直升机、运输机等不同载机所对应的算法模型生成安全 包线与机载大容量存储器中的全球高程数据做高度比较,当安全包线上某点低于地形高度 时,系统发出声光告警,提前提示飞行员做出改出机动,降低飞行员操作负担,防止可控飞 行撞地,保障飞行安全。 由此可见,地形感知与告警系统安全包线与高程数据做比较需要依赖于准确的飞 机几何高度。几何高度也称海拔高度,表示飞机与平均海平面的垂直距离。目前,飞机的几 何高度一般由飞机的航空数据计算机通过测量飞机当前飞行高度的气压,参考际标准大气 (ISA),按比例气压高度的形式提供。ISA是中纬度地区平均水平中最具有代表性的。ISA假 定大气是静态的和干燥的,空气压力主要取决于空气温度,重力和其他物理常数。由于军用 飞机执行任务时往往在低高度环境工作,因此,地形感知与告警系统主要工作在对流层。对 流层(低于11千米)的大气温度大致上满足如下规律:高度越高,气压越低,并以一定速率恒 定下降。海平面温度假定为15摄氏度,海平面气压假设为1013.25毫巴。然而,真实的大气可 能与这些假设差距较大,这些差距导致了气压高度与真实几何高度之间存在较大差距。
技术实现要素:
本发明的发明目的在于为实现前视地形告警安全包线与地形高程数据库中的高 程点进行相对高度分析,从而产生准确的地形防撞告警,提供了一种适用飞机几何高度的 计算方法,可以有效提高前视地形告警的准确性。 本发明的发明目的通过以下技术方案实现: 一种适用飞机几何高度的计算方法,包含以下步骤: 步骤1、利用流体静力学方程计算在当前时刻t时的飞机的几何高度Hge: 其中: P为当前时刻t时的大气压强; T为当前时刻t时的大气温度; g为当前时刻t时的重力加速度; R为当前时刻t时的通用大气常数; 4 CN 111551149 A 说 明 书 2/9 页 Hgetl为上一时刻的Hge; Ptl为上一时刻的大气压强; Rtl为上一时刻的通用大气常数。 进一步,还包含以下步骤: 步骤2、利用GPS高度对流体静力学方程计算的飞机的几何高度Hge进行补偿,得到 当前时间t用GPS高度补偿后的几何高度GPSHge: 其中: GPSHge为当前时刻t时GPS高度校准后的流体静力学高度; Hgps为当前时刻t时GPS高度; Tau为当前时刻t时滤波器的时间常数; S为拉普拉斯算子。 进一步,还包含以下步骤: 步骤3、当飞机处于起降状态时,利用无线电高度对流体静力学方程计算的飞机的 几何高度Hge进行补偿,得到当前时刻t的无线电高度补偿后的几何高度RADHge: RADHge=Hr Errort1 Error=Hr DBelev-Hge 其中: Error为当前时刻t的误差修正因子; Errort1为上一时刻的误差修正因子; Hr为当前时刻t的无线电高度; DBelev为当前时刻t的飞机下方9格单元格高程的平均值。 进一步,还包含以下步骤: 步骤4、利用飞机所处的气压和气温计算当前时刻t的飞机的几何高度htp: 其中:LM为国际标准大气规定的温度下降速率,P0为国际标准大气规定的海平面 气压,G0为国际标准大气规定的海平面重力加速度,R为干燥空气的空气常数,P为预测气 压;SAT为静态大气温度;hp为气压高度。 进一步,包含以下步骤: 步骤5、分别计算Hge、GPSHge、RADHge和htp的精度,利用GPS高度及GPSHge的精度 计算一个窗口,并将Hge、GPSHge、RADHge和htp与该窗口进行对比,若处于该窗口内则根据 各自的精度进行加权平均,得到最终几何高度。 优选地,Hge的精度HgeVFOM为: 其中,time为初始化后的系统时间,Kt为time的误差系数,dist为初始化后的飞行 距离,Kd为dist的误差系数,alt为初始化后的高度变化,Ka为alt的误差系数,ititial为初 5 CN 111551149 A 说 明 书 3/9 页 始化后的估计误差。 优选地,GPSHge的精度GPSHgeVFOM为: 其中,time2为上一次跟踪后的系统时间,Kt2为time2的误差系数,dist2为上一次 跟踪后的飞行距离,Kd2为dist2的误差系数,alt2为上一次跟踪后的高度变化,Ka2为alt2 的误差系数,GPSVFOMhold为上一次跟踪时几何高度GPSHget的精度。 优选地,RADHge的精度RADHgeVFOM为: 其中,time3为自上次校准以来的系统时间,Kt3为time3的误差系数,dist3为自上 次校准以来的飞行距离,Kd3为dist3的误差系数,alt3为自上次校准以来的高度变化,Ka3 为alt3的误差系数,DataBase为最后一次校准的地形数据库精度:RadAlt为无线电高度的 估计精度。 优选地,htp的精度HtpVFOM为: 其中,dist4为上一次跟踪后的飞行距离,alt4为上一次跟踪后的高度变化,上一 次跟踪后的飞行距离dist4,Itstability为初始化误差,Basic为基本误差。 本发明的有益效果在于:本发明为机载地形感知和告警系统解决了单独依赖大气 数据计算机得出的气压高度不准确的问题,可以有效提高飞机几何高度的准确性,进而确 定告警包线与数字高程地形的相对位置,提高机载地形感知和告警系统告警成功率,降低 虚警率。 附图说明 图1是直升机地形感知和告警系统前视地形告警功能的工作场景图,在飞行中的 某一时刻,机载嵌入式计算机根据载机(101)的经度、纬度、航向、地速、俯仰角、横滚角等实 时飞行参数以及载机最大爬升率等固定参数生成前视地形告警包线(102)。地形和障碍物 (103)海拔高度存储在机载大容量存储器中,当102与103有相交时,判断载机具有潜在的撞 地风险,发出语音告警。 图2是计算流体静力学高度的算法框图。 图3是由GPS高度补偿流体静力学高度的算法框图。 图4是由无线电高度补偿流体静力学高度的算法框图。 图5是由实际温度补偿气压高度的算法框图。 图6是计算各种高度补偿合理性的算法框图。 图7是确定飞机最终几何高度的算法框图。 6 CN 111551149 A 说 明 书 4/9 页











