
技术摘要:
本申请提供一种助行器控制方法、装置、设备、系统及计算机存储介质。其中,助行器控制方法包括步骤:接收用户针对助行器触发的目标操作指令;识别所述目标操作指令的发送源;根据所述发送源识别所述目标操作指令的优先等级;当判断出所述目标操作指令的优先等级满足预 全部
背景技术:
助行器被广泛使用辅助患者康复或辅助医护人员护理患者。目前,助行器只有一 个控制终端,助行器只接收一个控制终端发送的操作指令,这种方式不利于灵活使用助行 器。
技术实现要素:
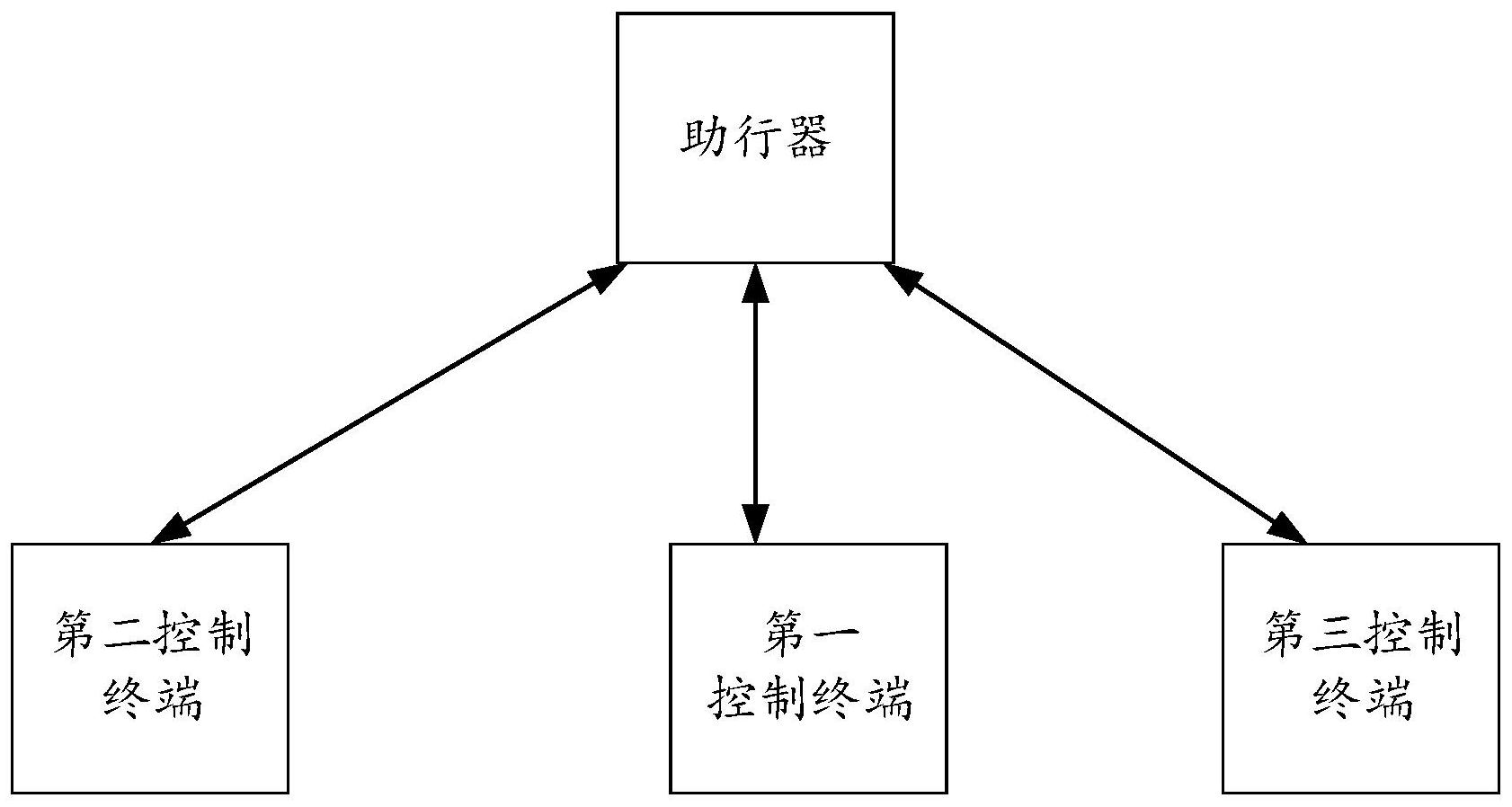
本申请实施例的目的在于提供一种助行器控制方法、装置、设备、系统及计算机存 储介质,用以实现通过多控制终端对助行器有序控制。 本申请第一方面公开一种助行器控制方法,所述方法应用于助行器中,所述方法 包括步骤: 接收用户针对助行器触发的目标操作指令; 识别所述目标操作指令的发送源; 根据所述发送源识别所述目标操作指令的优先等级; 当判断出所述目标操作指令的优先等级满足预设优先等级条件时,则执行所述目 标操作指令。 在本申请第一方面中,通过目标操作指令的发送源能够识别目标操作指令的优先 等级,进而能够按照预设的执行优先顺序执行目标操作指令,这样一来,能够避免多端控指 令冲突,尤其是能够优先执行重要等级高的操作指令,从而提高助行器的可控程度及使用 灵活性。 在本申请第一方面中,作为一种可选的实施方式,在所述根据所述发送源识别所 述目标操作指令的优先等级之后,所述执行所述目标操作指令之前,所述方法还包括步骤: 获取当前正在执行指令的优先等级; 将所述当前正在执行指令的优先等级与所述目标操作指令的优先等级进行比较, 若与所述目标操作指令的优先等级大于等于所述当前正在执行指令的优先等级,则确定所 述目标操作指令的优先等级满足预设优先等级条件。 在本可选的实施方式中,可将当前正在执行指令的优先等级与目标操作指令的优 先等级进行比较,这样一来,若与目标操作指令的优先等级大于等于当前正在执行指令的 优先等级,确定目标操作指令的优先等级满足预设优先等级条件。 在本申请第一方面中,作为一种可选的实施方式,在所述获取当前正在执行指令 的优先等级之后,所述方法还包括步骤: 当所述目标操作指令的优先等级等于所述当前正在执行指令的优先等级时,判断 所述目标操作指令与所述当前正在执行指令是否分别为第二控制终端的左右侧控制设备 4 CN 111544263 A 说 明 书 2/9 页 发送,若是则不触发所述执行所述目标操作指令,若否则触发所述执行所述目标操作指令。 在本可选的实施方式中,在所述执行所述目标操作指令之前,所述方法还包括步 骤: 获取所述助行器的充电状态; 判断所述助行器的充电状态是否满足预设状态条件,若不满足所述预设状态条 件,则不触发执行所述目标操作指令,若满足所述预设状态条件,则触发执行所述目标操作 指令。 在本申请实施例方式中,可助行器的充电状态判断助行器是否处于充电状态,进 而可在助行器的充电状态下不执行目标操作指令,这样一来,就能够避免在助行器的充电 状态下移动助行器,从而提高助行器的使用安全性。 在本申请第一方面中,作为一种可选的实施方式,在所述执行所述目标操作指令 之前,所述方法还包括步骤: 当所述目标操作指令为移动指令时,识别所述助行器的电机的状态; 判断所述助行器的电机的状态是否为抱闸状态时,若是则不触发所述执行所述目 标操作指令,若否,则触发所述执行所述目标操作指令。 在本可选的实施方式中,可根据助行器的电机的状态判断助行器是否处于抱闸状 态,若是则不执行目标操作指令,这样一来,可避免在抱闸下移动助行器,从而进一步提高 助行器的使用安全性。 在本申请第一方面中,作为一种可选的实施方式,所述目标操作指令为推杆俯仰 角度调节指令,推杆升降调节指令,速度设置指令、左右转向指令、移动指令、停止指令中的 一种指令。 在本可选的实施方式中,助行器可接收推杆俯仰角度调节指令,推杆升降调节指 令,速度设置指令、左右转向指令、移动指令、停止指令中的一种指令,这样一来可进一步提 高助行器的控制灵活性。 本申请第二方面公开一种助行器控制系统,所述系统包括第一控制终端、第二控 制终端、第三控制终端及助行器,所述第一控制终端、所述第二控制终端、所述第三控制终 端均与所述助行器通信连接,所述第一控制终端发送的操作指令、所述第二控制终端发送 的操作指令、所述第三控制终端发送的操作指令按照预设执行优先顺序排列; 所述助行器用于按照所述预设执行优先顺序排列执行所述第一控制终端发送的 操作指令、所述第二控制终端发送的操作指令、所述第三控制终端发送的操作指令。 通过本申请第二方面公开一种助行器控制系统,可实现助行器用多个控制终端控 制,尤其能够按照控制终端的操作指令的执行优先顺序排列执行操作指令,这样一来,就能 够优先执行重要等级高的操作指令,从而提高助行器的可控程度及使用灵活性。 本申请第三方面公开一种助行器控制装置,所述装置包括: 接收模块,用于接收用户针对助行器触发的目标操作指令; 第一识别模块,用于识别所述目标操作指令的发送源; 第二识别模块,用于根据所述发送源识别所述目标操作指令的优先等级; 第一判断模块,用于当判断出所述目标操作指令的优先等级满足预设优先等级条 件时,则执行所述目标操作指令。 5 CN 111544263 A 说 明 书 3/9 页 本申请第三方面公开的一种助行器控制装置通过执行助行器控制方法,能够通过 目标操作指令的发送源能够识别目标操作指令的优先等级,进而能够按照预设的执行优先 顺序执行目标操作指令,这样一来,能够避免多端控指令冲突,尤其是能够优先执行重要等 级高的操作指令,从而提高助行器的可控程度及使用灵活性。 本申请第四方面公开一种助行器控制设备,所述设备包括: 处理器;以及 存储器,配置用于存储机器可读指令,所述指令在由所述处理器执行时,使得所述 处理器执行本申请第一方面公开的助行器控制方法。 本申请第四方面公开的一种助行器控制设备通过执行助行器控制方法,能够通过 目标操作指令的发送源能够识别目标操作指令的优先等级,进而能够按照预设的执行优先 顺序执行目标操作指令,这样一来,能够避免多端控指令冲突,尤其是能够优先执行重要等 级高的操作指令,从而提高助行器的可控程度及使用灵活性。 本申请第五方面公开一种计算机存储介质,所述计算机存储介质存储有计算机程 序,所述计算机程序被处理器执行本申请第一方面公开的助行器控制方法。 本申请第五方面公开的一种助行器控制设备通过执行助行器控制方法,能够通过 目标操作指令的发送源能够识别目标操作指令的优先等级,进而能够按照预设的执行优先 顺序执行目标操作指令,这样一来,能够避免多端控指令冲突,尤其是能够优先执行重要等 级高的操作指令,从而提高助行器的可控程度及使用灵活性。 附图说明 为了更清楚地说明本申请实施例的技术方案,下面将对本申请实施例中所需要使 用的附图作简单地介绍,应当理解,以下附图仅示出了本申请的某些实施例,因此不应被看 作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以 根据这些附图获得其他相关的附图。 图1是本申请实施例公开的一种助行器控制系统的结构示意图; 图2是本申请实施例公开的一种助行器控制方法的流程示意图; 图3是本申请实施例公开的一种助行器控制方法的流程示意图; 图4是本申请实施例公开的一种助行器控制装置的结构示意图; 图5是本申请实施例公开的一种助行器控制设备的结构示意图。











