
技术摘要:
本发明揭示了一种基于曲面拟合的枪球联动坐标关联方法,其包括以下步骤:1)建立球机云台水平步数h与枪机图像坐标(x,y)的N阶曲面模型为模型一;2)建立球机云台垂直步数v与枪机图像坐标(x,y)的N阶曲面模型为模型二;3)采集n对枪球机坐标对应点(xi,yi,hi,vi),i=1,2,..., 全部
背景技术:
】 球联动本着即可以“掌控全局”又可以“把我细节”的优点,目前已在安防行业占据 了比较重要的地位。所谓枪球联动,就是用枪机来捕捉整个大场景的画面,通过枪机画面坐 标点去控制球机云台运动转向该点位置并将其放大观其细节。对于枪球联动坐标的计算方 法为:步骤一:根据枪机内部参数和畸变校正系数对枪机图像进行校正;步骤二:采集若干 枪机图像坐标与球机云台坐标的对应点坐标;步骤三:按照直角坐标到球坐标映射规则,建 立枪机画面校正后坐标与对应的球机云台坐标转换关系,通过采集的枪球机坐标对应点计 算该出转换关系的系数;步骤四:最终通过枪机画面坐标计算出畸变校正后的坐标点,然后 根据畸变校正后的坐标点通过转换关系得到对应的球机云台坐标,从而完成枪球联动的坐 标关联。 现有方法存在以下缺点: 1)由于一般枪机始终存在着畸变,并且畸变校正本身也存在误差,导致最终枪球 关联在枪机画面的会在局部区域产生较大的误差,且这个误差在某种程度上不会因为样本 点的增加而改善; 2)对于广角相机,特别的是那些已经进行了畸变校正的相机,实验表明很难通过 二次定标得到理想的畸变校正参数,从而现有的方法很难适用于这种相机。 因此,有必要提供一种新的基于曲面拟合的枪球联动坐标关联方法来解决上述问 题。 【
技术实现要素:
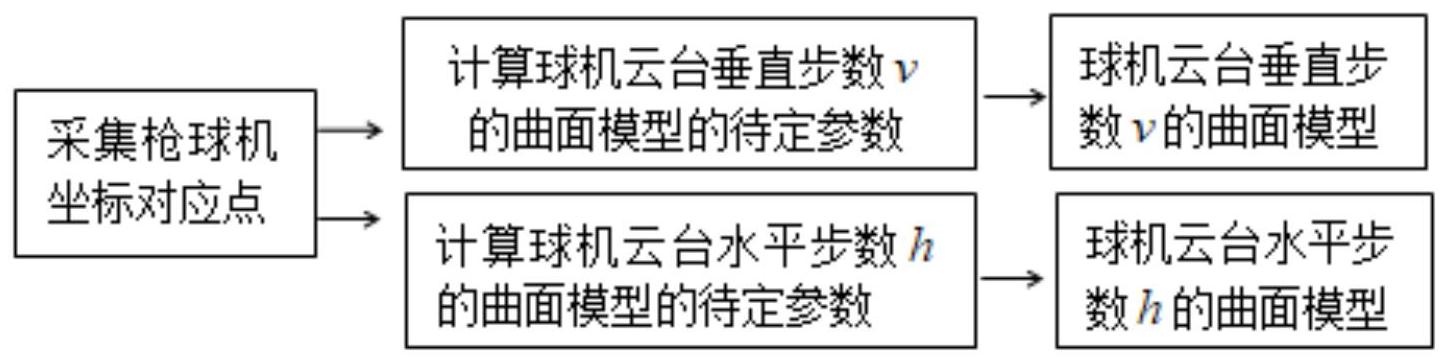
】 本发明的主要目的在于提供一种基于曲面拟合的枪球联动坐标关联方法,通过建 立枪机图像坐标的三阶曲面模型,然后实际采集枪球对应坐标来求解模型,得到拟合精度 高的枪球联动坐标关联曲面模,大大的提高了坐标关联的精准度。 本发明通过如下技术方案实现上述目的:一种基于曲面拟合的枪球联动坐标关联 方法,其包括以下步骤: 1)建立球机云台水平步数h与枪机图像坐标(x,y)的N阶曲面方程模型得到模型 一; 2)建立球机云台垂直步数v与枪机图像坐标(x,y)的N阶曲面方程模型得到模型 二; 3)采集n对的枪球机坐标对应点(xi,yi,hi,vi),i=1,2,...,n,其中(xi,yi)表示枪 机图像坐标,hi表示(xi,yi)对应的球机云台水平步数,vi表示(xi,yi)对应的球机云台垂直 步数; 5 CN 111581587 A 说 明 书 2/8 页 4)用最小二乘法将所述枪球机坐标对应点带入所述模型一和所述模型二中求解 所述模型一与所述模型二,得到N阶曲面方程的系数矩阵,从而得到球机云台坐标与枪机图 像坐标的关联模型。 进一步的,所述N阶曲面方程模型为三阶曲面模型,且所述模型一为: h=a a y a y2 300 01 02 a03y a10x a11xy a12xy2 a20x2 a 2 321x y a30x ; 所述模型二为: v=b b 2 3 2 200 01y b02y b03y b10x b11xy b12xy b20x b21x2y b 330x 。 进一步的,所述N阶曲面方程模型为四阶曲面模型,且所述模型一为: 所述模型二为: 进一步的,所述三阶曲面模型的系数矩阵A、B分别为: 进一步的,所述四阶曲面模型的系数矩阵A、B分别为: 6 CN 111581587 A 说 明 书 3/8 页 进一步的,所述步骤3)中采集的所述枪球机坐标对应点对数n>10。 进一步的,所述步骤3)中采集的所述枪球机坐标对应点对数n>15。 进一步的,所述步骤4)包括以下步骤: 4-1)将n对的枪球机坐标对应点(xi,yi,hi,vi)带入模型一、模型二中得到方程组 如下: 7 CN 111581587 A 说 明 书 4/8 页 4-2)令 则 所述模型一表示为: H=MA; 公式(5) 所述模型二表示为: V=MB; 公式(6) 4-3)由最小二乘法求解公式(5)、公式(6)可以得到: A=(MTM)-1MTH;B=(MTM)-1MTV。 进一步的,还包括步骤5):根据已知的枪机图像坐标,带入步骤4)中求得的球机云 台坐标与枪机图像坐标的关联模型,即得到球机云台坐标。 与现有技术相比,本发明一种基于曲面拟合的枪球联动坐标关联方法的有益效果 在于: 1)枪机图像坐标(x,y)分别与球机云台水平步数h和球机云台垂直步数v在空间上 可近似于一张曲面,本方案通过曲面拟合的方法实现对枪球联动的坐标关联,提高了球机 云台的运控控制精度,具体的分别将球机云台的水平步数和垂直步数与枪机图像坐标建立 两个曲面方程,然后通过采集若干个枪球对应坐标点解出这两个曲面方程的系数,然后就 可以通过这两个曲面方程到达枪机画面坐标对应的球机云台步数,即球机云台坐标; 2)不再对枪机进行畸变校正,而是通过曲面的拟合的方法直接将枪机画面坐标点 与球机云台坐标进行关联,一方面省去了枪机畸变校正的繁琐步骤,另一方面对枪机的要 求得到了放宽,即也可适用于市面上校正之后的广角相机。 8 CN 111581587 A 说 明 书 5/8 页 【附图说明】 图1为本发明实施例的原理示意框图; 图2为本发明实施例从枪机图像坐标得到球机云台坐标的示意框图。 【











