
技术摘要:
本发明公开了一种可实现生物反馈及远程探望的智能医疗服务机器人,包括机身和控制模块、通信模块、视觉感知模块、全向移动模块、SLAM建图导航模块、测温模块、消毒模块及语音和视频模块;控制模块连接并控制视觉感知模块、全向移动模块、SLAM建图导航模块、测温模块、 全部
背景技术:
医疗服务机器人能够协助医护人员和其他专业人士的工作,有助于节约医疗资 源,降低人工成本。医院和医疗实践已经引入了大量的自动化技术,如使用传送机器人来完 成派送药物,给患者配送午餐,将病人标本和医疗设备运送到不同的实验室等工作,有些医 院专门设立运送机器人用来打开遥控门甚至是参与做手术这类复杂性更高的任务,他们的 参与范围可以从简单地帮助固定手术工具到自主执行整个手术。 随着医疗自动化的不断发展,医疗服务机器人也开始充当看护的角色,尤其是面 向老年人。如今,世界各国人口老龄化问题突出,对日常琐事以及检查患者的医疗任务援助 需求不断增加,这些工作很繁琐、强度大,且薪资相对较低,所以常常很难招聘到员工。而机 器人擅长重复性、工作流程固定的工作,而且可以长时间连续作业,因此可以胜任多种任 务,例如清洁,起床唤醒和其他的日常需求。对于患者来说,除了生理健康照顾,他们的心理 健康也同样需要引起重视。为了给予患者更加全面的照顾,改善精神生活和缓解他们的社 会孤立感,帮助康复,医疗机器人还需要具有陪伴作用,因此有必要开发出具有生物反馈例 如识别情绪并给予情绪安抚,以及及时联系患者家属功能的医疗机器人。
技术实现要素:
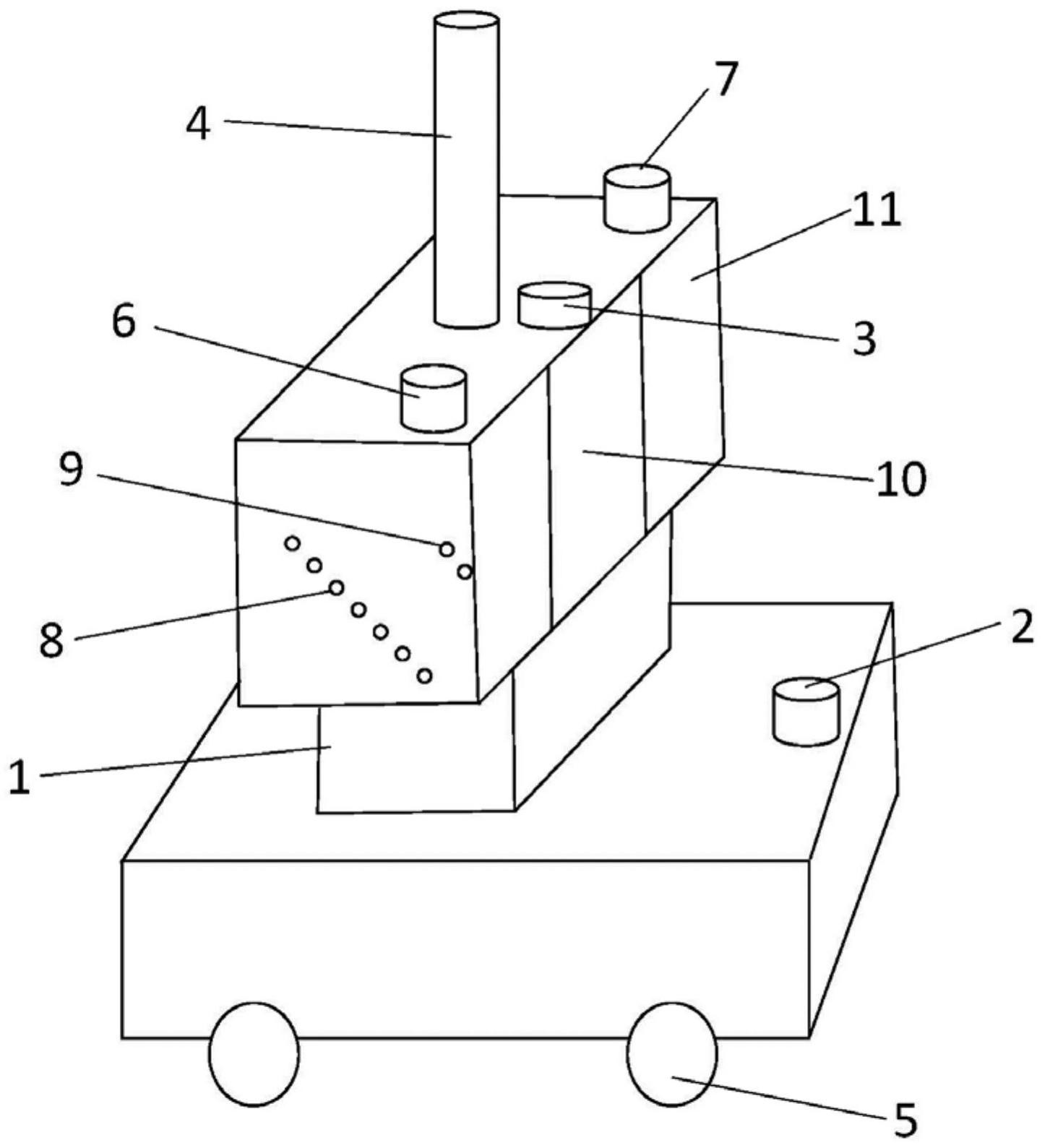
本发明的目的在于克服现有技术的缺点与不足,提供一种可实现生物反馈及远程 探望的智能医疗服务机器人,该医疗服务机器人可以实现生物反馈及远程探望,具有较高 的人机交互能力和智能化水平。 本发明的目的通过下述技术方案实现:一种可实现生物反馈及远程探望的智能医 疗服务机器人,包括:机身和安装在机身上的控制模块、通信模块、视觉感知模块、全向移动 模块、SLAM建图导航模块、用于检测人体温度的测温模块、消毒模块及语音和视频模块,其 中, 视觉感知模块具有连接控制模块的深度摄像头,深度摄像头用于采集场景的彩色 图、深度图,并将这些采集信息发送给控制模块;控制模块用于根据采集信息得出患者行为 和情绪、相关诊疗设备的工作情况的分类识别结果,相关诊疗设备的工作情况包括输液进 度、心电图波形数据; SLAM建图导航模块和全向移动模块分别连接控制模块,SLAM建图导航模块用于采 集环境数据,基于环境数据和深度摄像头的采集数据构建对应的地图,基于地图和目的地 生成导航路线,并将地图和导航路线发送给控制模块;控制模块用于根据导航路线和地图 控制全向移动模块的位移和速度; 测温模块和消毒模块分别连接控制模块,测温模块用于检测人体温度,并将温度 4 CN 111590582 A 说 明 书 2/5 页 检测数据发送给控制模块;消毒模块用于对机器人所在空间进行消毒; 语音和视频模块、通信模块分别连接控制模块,控制模块用于基于患者行为和情 绪、相关诊疗设备的工作情况的分类识别结果以及温度检测数据对患者进行监测,在监测 到患者行为异常、完成诊疗或者温度异常的情况下触发语音和视频模块进行语言提醒;在 需安抚患者情绪的情况下触发语音和视频模块播放与安抚情绪相关的内容,以及利用通信 模块无线连接患者家属的移动终端,通过与患者家属远程视频来进行情绪安抚。 优选的,控制模块包括上层工控机和底层控制板,上层工控机通过通信模块连接 并控制底层控制板、视觉感知模块、SLAM建图导航模块,以及语音和视频模块,底层控制板 连接并控制测温模块、消毒模块,以及全向移动模块。 更进一步的,机器人在机身表面设置有操作平板,操作平板连接上层工控机,操作 平板用于输入机器人的目的地、机器人移动控制指令、测温控制指令、消毒控制指令、语音 交互控制指令和远程视频控制指令,以及查看关于患者的深度摄像头采集数据。 更进一步的,SLAM建图导航模块具有环境检测传感器和IMU,环境检测传感器连接 上层工控机,IMU位于底层控制板上并且连接上层工控机,环境检测传感器包括但不限于激 光雷达、超声波传感器。 更进一步的,控制模块和通信模块收容于机身内,其中,底层控制板位于机身的底 盘内;消毒模块、深度摄像头和视频摄像头分别安装在机身的顶部;显示屏安装在机身表 面;扬声器和麦克风阵列安装在机身的身侧;全向移动模块安装在机身的底盘;环境检测传 感器设置在底盘表面的边缘位置;IMU设置在底盘内的底层控制板上。 优选的,全向移动模块包括四个驱动电机和四个麦克纳姆轮,驱动电机安装在机 身内并且连接控制模块,麦克纳姆轮平均分配并安装在机身的底盘的左右两侧,并且每个 驱动电机对应连接并驱动一个麦克纳姆轮。 优选的,控制模块通过通信模块无线连接医院的报警系统,用于在相关诊疗设备 的数据突发异常的情况下触发报警系统。 优选的,测温模块包括但不限于红外成像仪;消毒模块包括但不限于紫外线灯。 优选的,语音和视频模块包括视频摄像头、麦克风阵列、扬声器和显示屏,视频摄 像头、麦克风阵列、扬声器和显示屏分别连接控制模块。 优选的,通信模块为3G/4G/5G模块或者wifi模块。 本发明相对于现有技术具有如下的优点及效果: (1)本发明可实现生物反馈及远程探望的智能医疗服务机器人具有机身和安装在 机身上的控制模块、通信模块、视觉感知模块、全向移动模块、SLAM建图导航模块、测温模 块、消毒模块及语音和视频模块,能够实现测温、消毒、导航移动、语音交互、语音提醒、视觉 感知、远程视频和情绪安抚,相较于传统的医疗服务机器人,本发明医疗服务机器人增加了 生物反馈和远程探望功能,人机交互能力和智能化水平也更高,功能更多样化,用户体验也 更佳,并且在疾控阶段可以减少患者的对外接触,更好地防止感染的发生。 (2)本发明医疗服务机器人使用四轮麦克纳姆轮结构,使得机器人的运动更加敏 捷,灵活性更高,能够完成任意方向的移动及原地旋转,并且消毒模块可在指定区域自主移 动360度无死角消毒,特别是在疫情时期能发挥重要作用。 (3)本发明医疗服务机器人的控制模块能够基于深度摄像头的采集数据对患者行 5 CN 111590582 A 说 明 书 3/5 页 为和情绪、相关诊疗设备的工作情况进行分类识别,在识别出患者行为异常、完成诊疗或者 温度异常的情况下触发语音和视频模块进行语言提醒,在识别出患者情绪不佳的情况下及 时进行情绪安抚,给予患者更加全面的照顾,更有利于患者恢复,也实现了对患者的远程监 测,减少医护人员的工作负担。 (4)本发明医疗服务机器人在机身表面还设置有操作平板,患者和医护人员可以 通过操作平板输入机器人的目的地、机器人移动控制指令、测温控制指令、消毒控制指令、 语音交互控制指令和远程视频控制指令,以及查看关于患者的深度摄像头采集数据和温度 检测数据,使用和控制非常方便。 附图说明 图1是本发明可实现生物反馈及远程探望的智能医疗服务机器人的示意图。 图2是图1机器人机身上各个模块的连接示意图。 其中,1-机身,2-环境检测传感器,3-测温模块,4-消毒模块,5-麦克纳姆轮,6-深 度摄像头,7-视频摄像头,8-麦克风阵列、9-扬声器,10-显示屏,11-操作平板。











