
技术摘要:
本发明提供一种电动助力转向装置,不管车辆条件怎样都能获得恒定的转向感。本发明的电动助力转向装置具备控制装置(20)。控制装置(20)利用取得部(30)取得方向盘的位置,并且利用设定部(31)设定对方向盘作用的转向反作用力力矩的目标值。并且,控制装置(20)利用运算部(32 全部
背景技术:
在以往的电动助力转向装置中,转向辅助机构的马达输出的辅助力矩的值依据驾 驶员输入到方向盘的转向力矩的大小而决定。也就是说,在以往的电动助力转向装置中,作 为转向辅助机构的控制,进行力矩控制。在日本特开2003-026022号公报中公开了那样的以 往的电动助力转向装置的一例。 现有技术文献 专利文献 专利文献1:日本特开2003-026022号公报
技术实现要素:
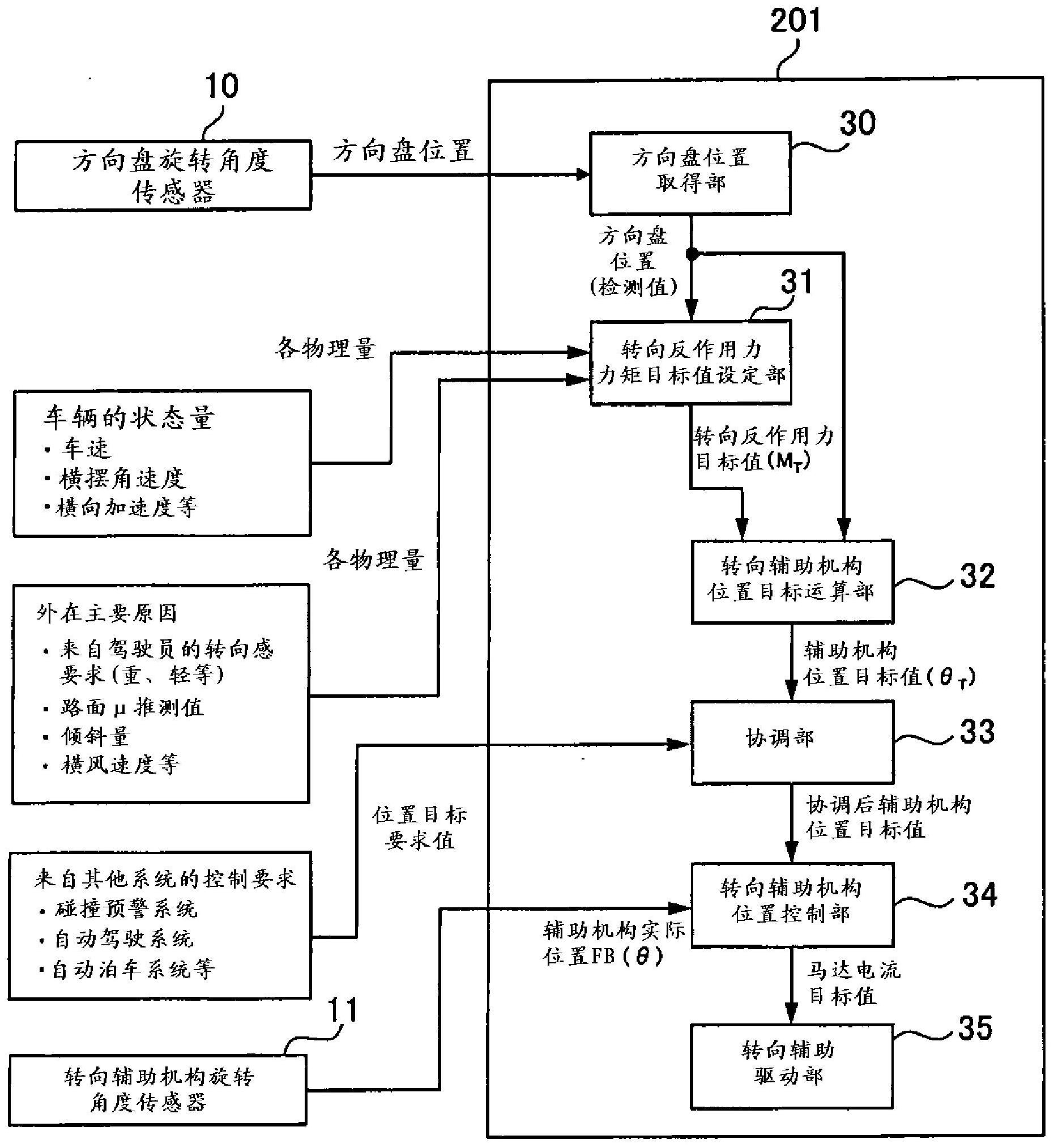
发明要解决的课题 车辆转向所需的转向力矩根据有效载荷、轮胎规格等车辆条件而变化。也就是说, 当车辆条件不同时,转向力矩与转向角的关系也变得不同。在具备电动助力转向装置的车 辆的情况下,驾驶员仅负担所需的转向力矩的一部分即可。但是,即便要负担的转向力矩较 少,如果每当车辆条件不同而使转向力矩发生变化,那么驾驶员也可能无法获得恒定的转 向感而感到不舒适。 本发明是鉴于上述的课题而做成的,目的在于提供一种不管车辆条件怎样都能获 得恒定的转向感的电动助力转向装置。 用于解决课题的方案 本发明的电动助力转向装置在具有利用马达进行动作的转向辅助机构,利用转向 辅助机构辅助由驾驶员进行的方向盘操作的电动助力转向装置中,具备以下这样构成的控 制装置。 本发明的电动助力转向装置的控制装置构成为取得方向盘的位置,设定对方向盘 作用的转向反作用力力矩的目标值,基于方向盘的位置和转向反作用力力矩的目标值运算 转向辅助机构的位置目标,按照转向辅助机构的位置目标对马达进行反馈控制。 关于方向盘位置的取得,例如能够采用以下这样的实施方式。当电动助力转向装 置具有方向盘旋转角度传感器时,也可以取得由方向盘旋转角度传感器检测到的方向盘位 置。另外,当电动助力转向装置具有检测转向辅助机构的位置的转向辅助机构旋转角度传 感器和检测对方向盘作用的转向反作用力力矩的转向反作用力力矩传感器时,也可以取得 基于转向辅助机构的位置和转向反作用力力矩推测到的方向盘位置。另外,转向辅助机构 旋转角度传感器也可以检测马达的位置,根据马达的位置和转向辅助机构的减速比运算转 向辅助机构的位置。 3 CN 111591341 A 说 明 书 2/6 页 例如也可以基于方向盘的位置设定转向反作用力力矩的目标值。另外,除了方向 盘的位置,还可以考虑涉及车辆的运动状态、行驶环境的信息来设定转向反作用力力矩的 目标值。 发明效果 采用本发明的电动助力转向装置,决定转向辅助机构的位置目标,以便使目标的 转向反作用力力矩作用于方向盘,并进行马达的反馈控制,以便实现转向辅助机构的位置 目标。由此,不管车辆条件怎样,正如目标那样的转向反作用力力矩都作用于方向盘,不管 车辆条件怎样,驾驶员都能获得恒定的转向感。 附图说明 图1是表示本发明的第1实施方式的电动助力转向装置的结构的图。 图2是表示本发明的第1实施方式的电动助力转向装置的控制装置的功能的图。 图3是说明转向反作用力力矩的目标值的设定方法的一例的图。 图4是说明转向反作用力力矩的目标值的设定方法的另一例的图。 图5是表示本发明的第2实施方式的电动助力转向装置的结构的图。 图6是表示本发明的第2实施方式的电动助力转向装置的控制装置的功能的图。











