
技术摘要:
本发明公开的一种履带与越野路面耦合分析方法,属于车辆动力学技术领域。本发明通过建立履带车辆的履带‑路面整形滤波模型,得到瞬时履带车辆负重轮所受到的由接地段履带构成的实际路面高程激励,对越野工况下行驶的履带车辆的动力学性能高精度预测,进而对履带车辆的 全部
背景技术:
履带车辆具有与轮式车辆不同的行驶系统,其行驶装置由主动轮、诱导轮、负重 轮、张紧装置及闭环履带组成,由于履带对地面的整形作用,履带车辆相对轮式车辆在越野 工况下具有更好的通过性。履带车辆在越野工况下行驶时,地面对履带车辆的作用力通过 履带进行传递,地面不与负重轮直接接触,则路面不平度也并不直接作用于负重轮,而是经 过履带的整形作用,对原始路面不平度进行了一定程度上的滤波,使履带车辆等效于行驶 在由履带自铺的道路上行驶。在对履带车辆的动力学进行描述时,只建立路面不平度模型 是不够的,还需要了解经过履带作用的实际路面高程激励模型,由于履带是由若干块履带 板经履带销连接构成且履带板是刚性的,履带不能完全贴合地面的轮廓,路面谱中波长小 于履带板长度的部分会被过滤掉,限制了路面激励中的高频成分,从而改变了传递到负重 轮处的路面激励。对履带车辆的履带自铺高程模型的建立,是对越野工况下履带车辆动力 学分析研究的重要基础。
技术实现要素:
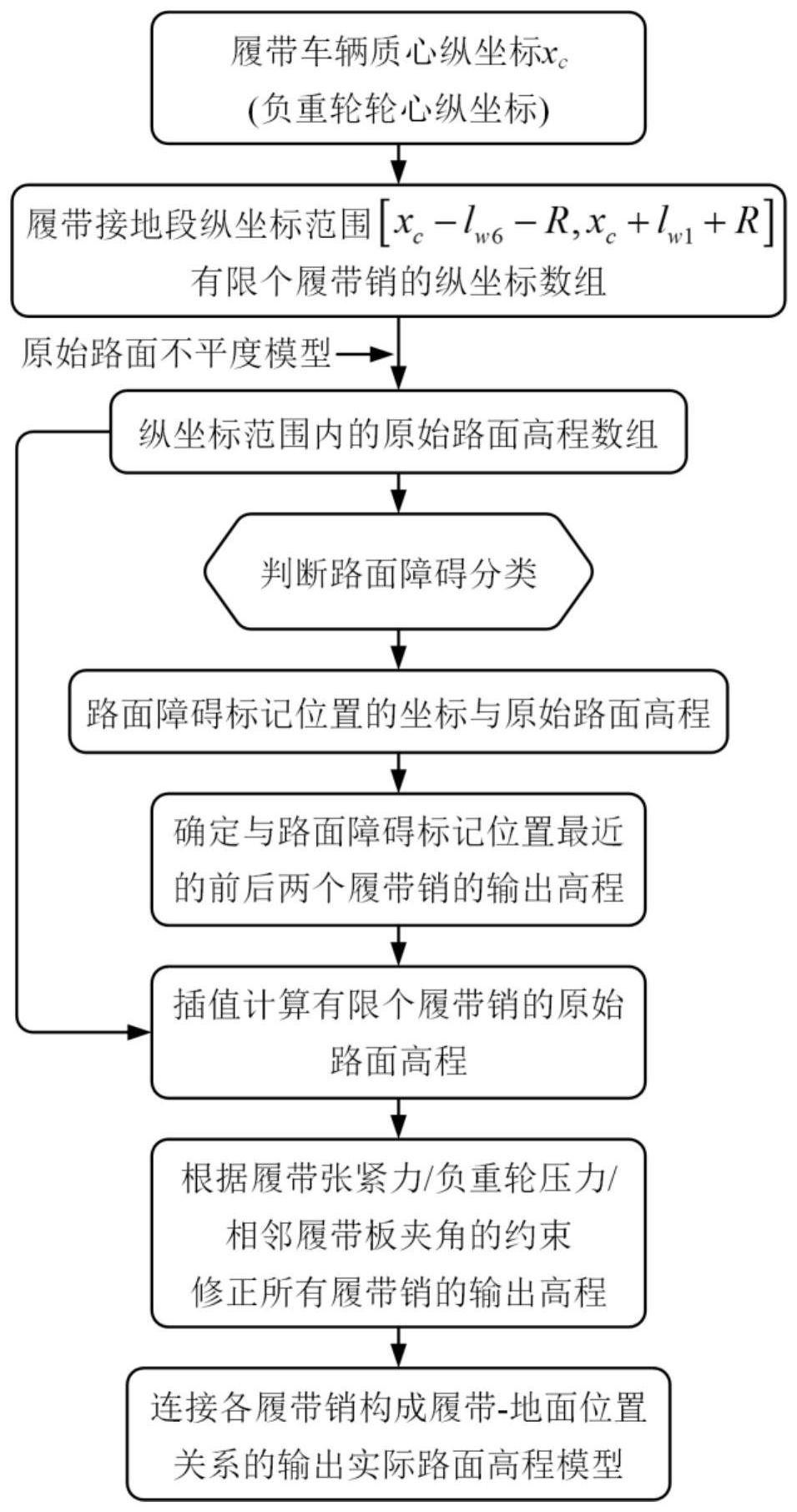
本发明公开的一种履带与越野路面耦合分析方法要解决的技术问题是:通过建立 履带车辆的履带-路面整形滤波模型,得到瞬时履带车辆负重轮所受到的由接地段履带构 成的实际路面高程激励,对越野工况下行驶的履带车辆的动力学性能高精度预测,进而对 履带车辆的悬架设计、动力传动装置参数设计提供指导,从而提高履带车辆在越野路面上 的动力学性能和车辆行驶平稳性。 本发明的目的是通过下述技术方案实现的: 本发明公开的一种履带与越野路面耦合建模分析方法,包括如下步骤: 步骤一:对于行驶在越野工况下的履带车辆,获取履带车辆单侧负重轮数量、履带 车辆质心与所有负重轮轮心的纵向距离,以及负重轮半径。 步骤一实现方法为:对于行驶在越野工况下的履带车辆,获取履带车辆单侧负重 轮数量N、履带车辆质心与所有负重轮轮心的纵向距离lwi(i=1~N),以及负重轮半径R。 步骤二:在任一瞬时时刻,根据履带车辆动力学模型获取车辆质心的纵坐标;根据 质心纵坐标与各负重轮轮心的纵向距离,确定履带车辆各负重轮轮心的纵坐标;根据履带 车辆各负重轮轮心的纵坐标,得到处于接地段履带范围内的履带原始输出高程。 步骤二实现方法为: 步骤2.1:在任一瞬时时刻,根据履带车辆动力学模型获取车辆质心的纵坐标xc。 步骤2.2:根据质心纵坐标xc与各负重轮轮心的纵向距离lwi(i=1~N),确定履带 4 CN 111597639 A 说 明 书 2/6 页 车辆各负重轮轮心的纵坐标xwi(i=1~N)。 步骤2.3:根据履带车辆各负重轮轮心的纵坐标xwi(i=1~N),得到处于接地段履 带范围内的履带原始输出高程q(x)。 步骤三:根据各负重轮轮心的纵坐标,令履带板长度为负重轮半径的一半,以负重 轮半径的一半为间隔取轮心相邻两个点作为履带销的位置,根据接地段履带范围内的履带 原始输出高程以及履带销的位置,得到相应位置的高程。 步骤三实现方法为:根据各负重轮轮心的纵坐标xwi(i=1~N) ,令履带板长度为负 重轮半径R的一半,以R/2为间隔取轮心相邻两个点作为履带销的位置xnew(t),对位于相邻 负重轮相邻边缘之间的履带板不再分割,视作一整块履带板,由此共确定5N个履带销位置, 根据接地段履带范围内的履带原始输出高程q(x)以及履带销的位置xnew(t),得到相应位置 的高程,记作qnew(xnew(t))。 步骤四:根据任意瞬时时刻的履带销的位置和原始路面高程模型确定履带瞬时输 出高程。由原始路面高程模型得到瞬时时刻接地段履带范围内的履带输入高程,对路面激 励进行分类,针对分类得到的单一凸起路面激励、单一凹坑路面激励、多个凸起或凹坑路面 激励和随机路面激励,分别确定各履带销的输出高程,连接所有履带销得到负重轮行驶的 实际履带自铺路面高程。 步骤四实现方法为: 步骤4.1:根据任意瞬时时刻的履带销的位置xnew(t)和原始路面高程模型q(x),得 到瞬时时刻接地段履带范围内的履带输入高程q(xnew(t))。对路面激励进行分类,包括单一 凸起路面激励、单一凹坑路面激励、多个凸起或凹坑路面激励和随机路面激励。 步骤4.2:根据步骤4.1对路面激励进行分类得到的单一凸起路面激励、单一凹坑 路面激励、多个凸起或凹坑路面激励和随机路面激励四种路面激励,分别确定各履带销的 输出高程,连接所有履带销得到负重轮行驶的实际履带自铺路面。 步骤4.2.1:对于单一凸起路面激励,确定接地段履带范围内的最大原始路面高程 q及相应纵坐标位置xq,确定履带车辆质心位置xc与该最大原始路面高程位置的关系,若车 辆质心位置xc在最大原始高程后方,则履带车辆后端至少有一个履带销着地,车辆质心距 离最大原始路面高程越远,着地的履带销个数越多,由于履带张紧力的作用,将存在一部分 履带板腾空,车辆前端在履带张紧力的作用下保持与x轴正方向存在一个逆时针方向夹角, 车头方向向上,车辆质心距离最大原始路面高程越远,车辆前端与x轴正方向的夹角越大; 若车辆质心在最大原始高程前方,在履带张紧力的作用下车辆后端履带销离开地面,前端 履带逐个落地,当车辆质心距离最大原始路面高程足够远时,履带车辆后端在履带张紧力 的作用下产生与x轴负方向一个顺时针方向夹角,车尾方向向上。根据履带车辆质心位置xc 与该最大原始路面高程位置的关系确定最大原始路面位置相邻前后两个履带销的履带输 出高程,再分别依次向前和向后确定其他履带销位置的履带输出高程,连接所有履带销得 到负重轮行驶的实际履带自铺路面。 步骤4.2.2:对于单一凹坑路面障碍类型,确定接地段履带范围内的单一凹坑的起 始和结束位置,由于负重轮对履带的压力作用,与凹坑两侧边缘的距离都较远的负重轮下 方的履带销的履带输出高程为最小值,由于履带的张紧力作用,位于凹坑之间的履带板腾 空,其相应履带销的输出高程大于原始路面高程,凹坑之间的负重轮个数越多,履带输出高 5 CN 111597639 A 说 明 书 3/6 页 程模型的最小值越小,靠近凹坑两端标记坐标的履带销的位置始终满足相邻履带板最大夹 角的约束限制,由此得到单一凹坑路面障碍下的各履带销的输出高程,连接所有履带销得 到负重轮行驶的实际履带自铺路面高程。 步骤4.2.3:对于多个凸起或多个凹坑路面障碍类型,确定接地段履带范围内各凸 起的纵坐标及原始高程或各凹坑两端支撑点的纵坐标及原始高程,分别确定与各个凸起位 置或凹坑两端支撑位置最近的前后两个履带销的履带输出高程,根据相邻履带板的夹角约 束,考虑负重轮对其下方履带板的压力作用和履带的张紧力作用,得到其他履带销的输出 高程,连接所有履带销得到负重轮行驶的实际履带自铺路面高程。 步骤4.2.4:对于随机路面激励类型,确定接地段履带范围内的最大原始路面高程 及相应坐标位置,确定最大高程位置相近的前后两个履带销的履带输出高程,以所述两个 履带销作为起始点,分别依次对向前和向后的各个履带销,根据原始路面高程通过插值法 得到其原始高程,在输出高程不低于原始高程约束和相邻履带板的最大夹角约束两个约束 条件下,得到各履带销的输出高程,连接所有履带销得到负重轮行驶的实际履带自铺路面 高程。 步骤五:将步骤四得到的瞬时履带车辆负重轮所受到的由接地段履带构成的实际 履带自铺路面高程,带入整车动力学模型,对越野工况下行驶的履带车辆的动力学性能进 行高精度预测,进而对履带车辆的悬架设计、动力传动装置参数设计提供指导,从而提高履 带车辆在越野路面上的动力学性能和车辆行驶平稳性。 有益效果: 1、本发明公开的一种履带与越野路面耦合分析方法,充分考虑原始路面高程模型 与履带对路面的整形滤波作用,既考虑路面不平度的影响,也充分考虑实际越野工况下履 带车辆的履带自铺路面的作用,能够提高负重轮行驶的实际履带自铺路面的精度,进而能 够提高越野工况下行驶的履带车辆的动力学性能预测精度。 2、本发明公开的一种履带与越野路面耦合分析方法,对瞬时时刻确定的接地段履 带纵坐标范围内进行履带与越野路面的耦合建模,有效提高越野工况下行驶的履带车辆的 动力学性能预测效率,并能够为越野工况履带车辆动力学预测分析提供充分的外部高程激 励输入。 3、本发明公开的一种履带与越野路面耦合分析方法,根据任意瞬时时刻的履带销 的位置和原始路面高程模型确定履带瞬时输出高程,由原始路面高程模型得到瞬时时刻接 地段履带范围内的履带输入高程,对路面激励进行分类,针对分类得到的单一凸起路面激 励、单一凹坑路面激励、多个凸起或凹坑路面激励和随机路面激励,分别确定各履带销的输 出高程,连接所有履带销得到负重轮行驶的实际履带自铺路面高程,带入整车动力学模型, 能够进一步提高越野工况下行驶的履带车辆的动力学性能预测精度。进而对履带车辆的悬 架设计、动力传动装置参数设计提供指导,从而提高履带车辆在越野路面上的动力学性能 和车辆行驶平稳性。 附图说明 图1为本发明公开的一种履带与越野路面耦合分析方法的接地段履带位置示意 图。 6 CN 111597639 A 说 明 书 4/6 页 图2为本发明公开的一种履带与越野路面耦合分析方法流程示意图。 图3为基于本发明公开的一种履带与越野路面耦合分析方法得到的某履带车辆经 过路面障碍的过程中几个瞬时时刻的履带输出高程示意图,其中:图3a为履带车辆前轮刚 接触路面障碍,图3b为履带车辆在路面障碍上方,且车辆质心在障碍左侧,图3c为履带车辆 在路面障碍上方,且车辆质心在障碍右侧,图3d为履带车辆在路面完全经过路面障碍。











