
技术摘要:
本发明液压爬模同步顶升系统采用容积调速(泵控直驱),为了实现在高负载、较大偏载情况下的液压爬模同步顶升,采用单控制器,已经满足不了大区域的爬模机构了,因此本发明提出分布式控制策略,运用相邻偏差耦合神经网络PID控制算法来实现多液压缸的同步运动。该液压爬 全部
背景技术:
现如今,随着市人口迅速增加,为了满足居民的生活需要,需要建造大量的高层、 超高层建筑及大型构筑物,因此如何将安全高效的施工技术应用到施工过程中成为众多施 工企业迫在眉睫的难题。传统的模板施工存在着塔设困难、工序繁琐、安全保护性差、成本 高、效率低等缺点,为液压爬模技术在高层建筑施工中具备操作方便、安全性高、节省材料、 工期短等诸多优点,使其越来越广泛运用与高层建筑中。就目前而言,国内外学者对液压爬 模研究主要集中在工程实际应用与施工方面,导致了在液压爬模同步系统方面的诸多不 足,目前液压爬模同步控制系统大多采用主从同步、并行同步等传统控制策略,因此系统存 在着容易产生延时、抗干扰能力差等缺点。已经不能满足高层建筑中对液压爬模高精度、低 污染、自动化控制的要求。因此本发明提出一种分布式泵控相邻偏差耦合神经网络PID液压 爬模顶升方方法,用于解决传统液压爬模系统中存在的不足。
技术实现要素:
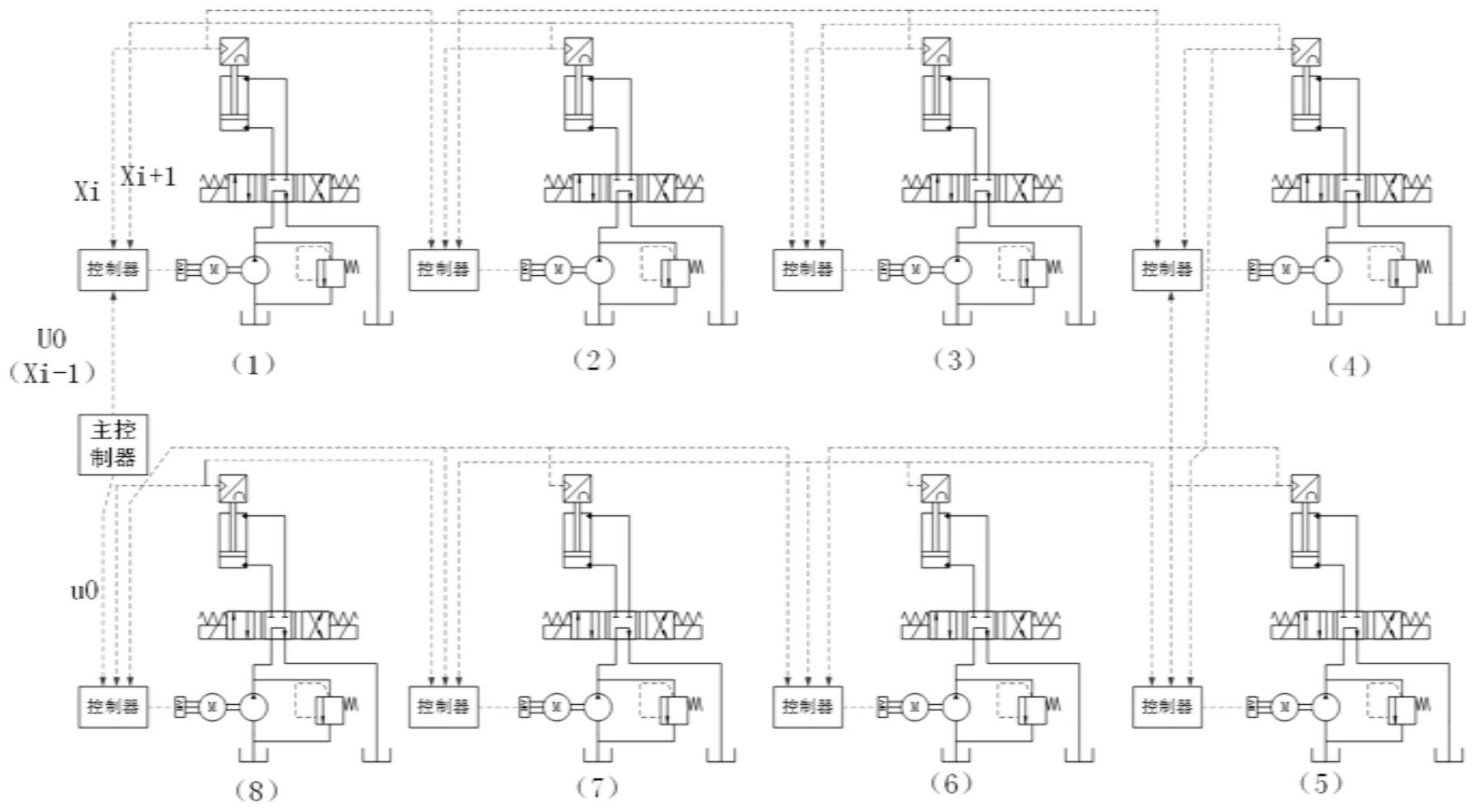
本发明具体采用如下技术方案实现: 一种分布式泵控相邻偏差耦合神经网络PID液压爬模顶升系统,包括液压模块和 控制模块: 所述液压模块包括多个相同的容积调速液压回路,每个容积调速液压回路均由各 自独立的伺服电机驱动单向定量泵供油;各个伺服电机均由控制模块控制; 所述控制模块包括一台主控制器和多台分控制器,每个分控制器控制一台伺服电 机; 每台分控制器均设有神经网络PID模块,主控制器向每个分控制器发送相同的期 望位移信号u0,分控制器根据u0控制液压回路运动; 每一个液压回路中液压缸的位移信息通过位移传感器测定,并传输给对应的分控 制器以及其前后两台分控制器;第i个液压回路的液压缸位移分别与第i-1个和第i 1个位 移做差,并将它们的偏差相加作为补偿信号ei: ei=(xi-xi-1) (xi-xi 1) 其中,第一个液压回路前面每一液压回路,将主控制器的信号u0作为x0信号传递给 第1个分控制器进行处理;最后一个液压回路中也将主控制器的信号u0作为xi 1信号传递给 该回路分控制器进行处理; 各个控制器根据计算得到的补偿信号ei调整液压回路的运动。 进一步的,所述液压模块包括8个相同的容积调速液压回路。 3 CN 111550472 A 说 明 书 2/3 页 进一步的,所述控制模块的主控制器与各个分控制器以及各个分控制器之间采用 无线传输方式连接与现有技术相比,本发明具有如下优点: 1.采用容积调速,效率高,污染少。 2.采用相邻偏差耦合神经网络PID控制算法,提高了泵控系统的同步精度。 3.采用分布式控制策略与无线传输,提高了系统的抗干扰能力强,可靠性高。 附图说明: 图1液压爬模同步顶升系统结构原理图。 图2位移补偿器 图3相邻偏差耦合控制策略 图4神经网络PID控制 具体实施方案 本发明液压爬模同步顶升系统采用容积调速(泵控直驱),为了实现在高负载、较 大偏载情况下的液压爬模同步顶升,采用单控制器,已经满足不了大区域的爬模机构了,因 此本发明提出分布式控制策略,运用相邻偏差耦合神经网络PID控制算法来实现多液压缸 的同步运动。该液压爬模同步顶升系统由液压模块与控制模块组成,该系统原理图如图1所 示。 液压模块:该液压爬模同步顶升系统的液压模块由八个相同的容积调速液压回路 组成,容积调速液压回路由伺服电机驱动单向定量泵给液压系统供油,通过变频器改变伺 服电机的转速控制泵的转速,从而控制定量泵的排量,控制液压缸的位移;溢流阀用于溢流 稳压,三位四通阀用于液压缸换向,液压缸端口安装位移传感器,将液压缸位移实时准确的 反馈给各液压回路的分控制器。 控制器模块:控制器模块由一个主控制器与八个分别用于控制单个容积调速回路 的分控制器组成。主控制器与分控制器之间得信息传递都采用无线网络输送,无线传输技 术具有优良的抗干扰性和高可靠性,有利于结构的精简,同时也能减少应外界线路连接过 多、过长而被损坏的缺点。液压回路中的位移传感器的反馈信号也采用无线网络传输给各 回路的分控制器。本发明中所采用的电磁换向阀也采用可接收无线信号的电磁换向阀,通 过接收分控制器的信号,从而控制换向阀的位置机能。 主控制器给每个分控制器通过无线网络发送相同的目标位移u0,通过各分控制器 转换为调频信号传输给各液压回路的变频器,通过变频器控制电机的转速,定量泵与电机 以相同的转速旋转,通过调整电机的转速就能控制定量泵的输出流量,与液压缸的位移。 每个分控制器都采用相邻偏差耦合神经网络PID算法对反馈与控制信号进行处 理,其控制信号流程图如图3所示。每个分控制器都会收到来自主控制器相同的期望位移信 号u0,将每一个液压回路中液压缸的位移信息通过位移传感器传输给对应控制器,并与该 回路相邻的前后两个回路的位移反馈信号作差,得到的偏差相加作为补偿信号,如图2所 示。 这里以第i各液压回路为例,第i个液压回路的液压缸位移分别于第i-1个和第i 1 个位移做差,并将它们的偏差相加作为补偿信号ei,其中,第一个液压回路前面每一液压回 4 CN 111550472 A 说 明 书 3/3 页 路,因此我们将主控制器的信号u0作为x0信号传递给第1个位移补偿器进行处理;同理,最后 一个液压回路中也将主控制器的信号u0作为xi 1信号传递给该回路位移补偿器进行运算。 最终每个控制器得到的得补偿信号是: ei=(xi-xi-1) (xi-xi 1) 在各分控制器上添加神经网络PID控制器,神经网络PID控制器由传统的PID控制 器和神经网络算法组成,神经网络PID控制器如图4所示,控制器能够根据爬模系统的运动 情况,调节PID控制器的参数,以达到同步性能的最优,使输出层神经元的输出状态对应于 PID控制器的三个参数kP、kI、kD,通过神经网络的自身学习、加权系数调整,从而使其稳定转 态对应于某种最优控制规律下的PID控制器参数。 将相邻偏差耦合控制策略与神经网络PID控制算法结合,即消除了相邻耦合在抗 干扰能力差、延迟明显的缺点,也解决了偏差耦合在多液压缸同步情况下需要复杂算法的 难题,运用神经网络PID控制算法,提高系统的自动化程度,使系统的状态达到最优。 5 CN 111550472 A 说 明 书 附 图 1/3 页 图1 图2 6 CN 111550472 A 说 明 书 附 图 2/3 页 图3 7 CN 111550472 A 说 明 书 附 图 3/3 页 图4 8











