
技术摘要:
本发明公开了一种适用于不同维度弯轨的轨道小车,包括水平驱动模块、轨道、小车箱体,还包括垂直驱动模块、导向模块;水平驱动模块、垂直驱动模块均采用齿形链传动,且均与小车箱体相连水平驱动模块用于驱动小车在平面直线或圆弧轨道进行前进和后退;垂直驱动模块用于 全部
背景技术:
随着机器人技术的不断发展,巡检机器人在各领域中的应用越来越广泛。其中巡 检轨迹相对固定的轨道小车相对使用较多,常搭载各类传感器应用于检测、传输等多种场 合。由于使用场合的不同,轨道小车不仅需要适用直线轨道,也需要适用弯轨。目前很多小 车需要设计专门的辅助转弯的机构,结构复杂冗长,而且在转弯半径较小的圆弧轨道上运 行时容易出现啃轨、难以转弯和卡死的现象,其主要原因在于在转弯半径较小的圆弧轨道 上运行时,由于前轮和后轮接触点处轨道切线方向夹角较大,导致前轮和后轮与轨道的接 触状态改变,轮沿容易摩擦轨道边缘甚至卡死。为了使轨道小车更加轻巧,能够具有良好的 弯轨通过能力,必须考虑对轨道小车进行结构设计。 申请号201720773824.1中国专利提出了一种行走机构,该结构设计采用前后导向 机构以实现小车通过圆弧弯轨,前后导向机构通过轴承座安装在底板上,可绕自身转动,驱 动机构安装在滑块上,滑块可以在底板上左右移动,当进入弯道时,前后导向机构可以转动 以此适应轨道,同时驱动机构左右移动防止卡死。该发明中,前后导向机构的转动中心连线 固定,代表小车前进方向,直线轨道处,其中心点连线即沿轨道中心线,此时驱动模块位置 不变能保持小车顺利通行;进入弯轨时,前后导向机构的转动中心连线位于圆弧轨道的两 点,此时如果驱动模块位置不变,则小车会卡死,因此该结构设计将驱动模块固定在滑块 上,可以在底板上左右移动,但是实际上刚进入弯道时,前导向机构进入弯轨,后导向机构 还在直轨,此时要想保持小车运动不卡死,不仅需要驱动模块相对小车左右移动还需要有 一定转动,驱动轮才能始终贴合在轨道外表面,但是该机构并不能实现,且驱动模块来回移 动,固定在上面的电机也会带来一定隐患,因此这些装置在轨道小车运用上存在很大的局 限性。 同时这些设计多数只能适用于平面传动,但是由于使用场合的不同,某些时刻需 要小车能够上升下降,进行多维度的运动,而这些设计并不适用,使得轨道小车的使用实用 性大大减少。
技术实现要素:
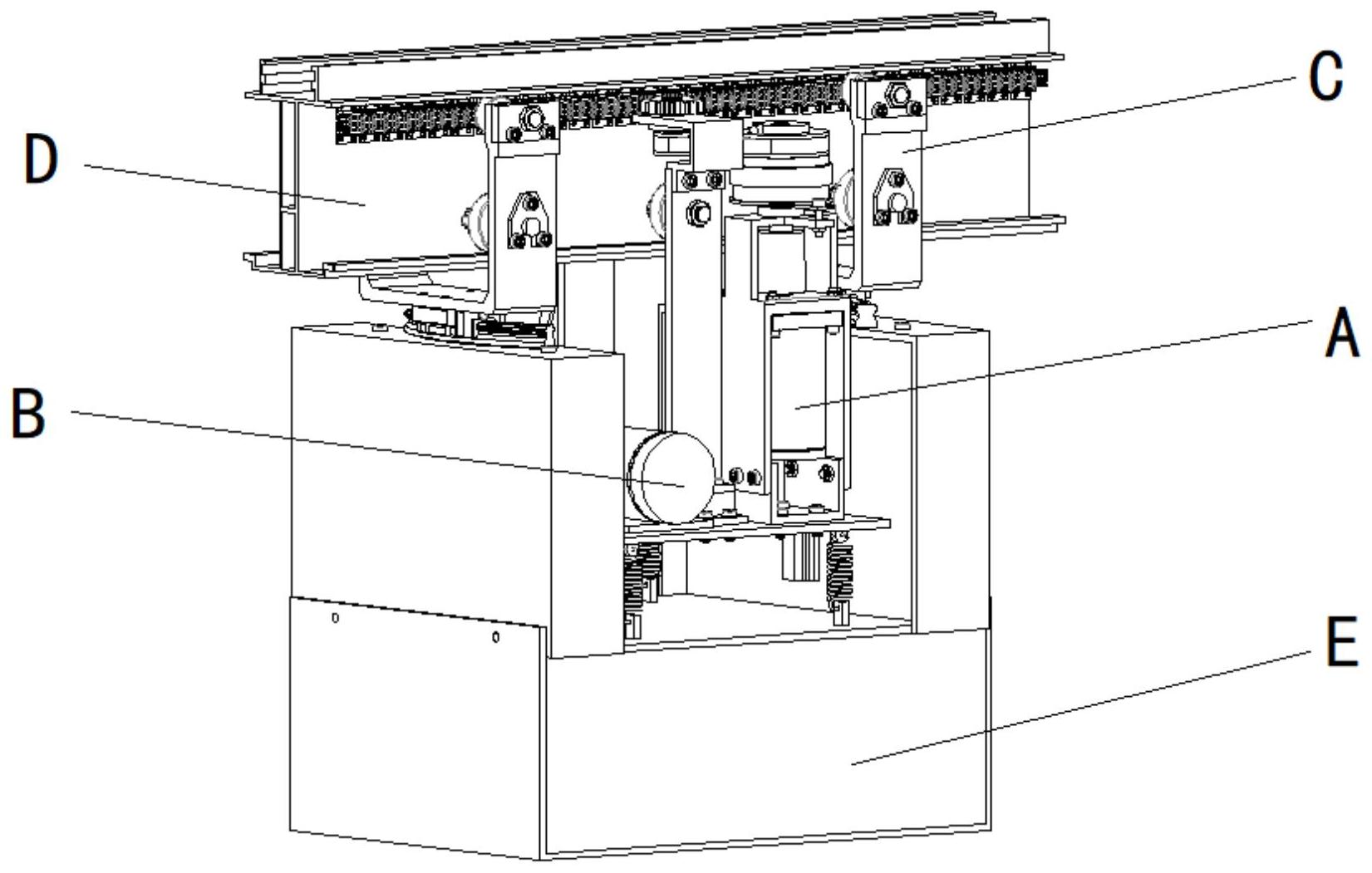
本发明的目的在于提供一种用于不同维度弯轨的轨道小车,以轨道小车不仅能在 平面内的直线或圆弧轨道进行移动,还能进行爬坡,实现多维度运输。 实现本发明目的的技术解决方案为: 一种适用于不同维度弯轨的轨道小车,包括水平驱动模块、轨道、小车箱体,还包 括垂直驱动模块、导向模块; 所述水平驱动模块、垂直驱动模块均采用齿形链传动,且均与小车箱体相连;所述 水平驱动模块用于驱动小车在平面直线或圆弧轨道进行前进和后退;所述垂直驱动模块用 4 CN 111573179 A 说 明 书 2/4 页 于驱动小车沿轨道的爬坡;所述垂直驱动模块设有检测模块,用于检测小车是否进入和驶 出爬坡阶段,实现水平驱动模块与垂直驱动模块电机的切换;所述垂直驱动模块与小车箱 体之间设有竖直方向的弹性补偿模块,使得小车进入弯轨运动过程中,垂直驱动模块可相 对小车箱体上下移动;所述小车箱体上端前后两侧分别设有导向模块,所述导向模块用于 小车传动以及进入圆弧弯轨的导向辅助;所述导向模块通过弧形导轨副与小车箱体相连; 两个弧形导轨副相对设置,且具有相同的圆心。 本发明与现有技术相比,其显著优点是: (1)本发明结构简单,不需要额外的机构就可以进行平面移动以及爬坡移动,实现 多维度的运输功能,水平和垂直两个方向的传动采用两套独立的驱动系统,不会相互干扰。 传动部分采用齿形链传动,传动方式平稳安全高效。 (2)水平进入弯轨时,前后导向模块可以在圆弧形滑轨上移动,进入弯轨部分中, 前后导向模块依次发生偏移,就可以在弯道处实现稳定导向,整体结构精巧,高效且轨道适 应性好。 附图说明 图1为本发明轨道小车在轨道上的右侧安装示意图。 图2为本发明轨道小车在轨道上的左侧安装示意图。 图3为本发明轨道小车的水平驱动模块结构示意图。 图4为本发明轨道小车的垂直驱动模块结构示意图。 图5为本发明前后导向模块的结构示意图。 图6为本发明导轨的结构示意图。 图7为本发明小车箱体结构示意图。 图8为本发明前后导向模块上的弧形滑轨滑块在小车上安装分布示意图。 图9为本发明轨道小车在爬坡时刚进入弯轨时的示意图。 图10为本发明轨道小车在平面转弯时进入弯轨时的示意图。











