
技术摘要:
本申请揭示了一种安防监控方法、装置、机器人和存储介质,该方法包括:机器人采集声音信号;提取声音特征参数,通过预先训练的声音识别模型进行事件类别第一判定;当第一判定结果为第一异常事件时,获取声源相对于所述机器人的定位以及声源在预设地图中的位置信息,并 全部
背景技术:
如今,网络摄像头监控技术发展得相当成熟稳定,已成为安防领域的主要手段之 一。然而尽管摄像头能解决绝大部分环境条件下的监控问题,但仍存在诸如存在监控死角、 监控画面失真、对光照条件要求高等隐患。另一方面,视频文件的资源占用以及视频流的实 时处理对存储容量和处理器都提出了更高的要求。 音频作为与视频不同的信号源,作为视频的补充,能显著提高视频监控系统的安 全性。在现实生活中,许多异常情况的发生常伴随着相应的声音。监控系统在听到异常声音 时,可以调整监控的视角,从而实现对运动目标进行定位和追踪,但是目前具有音频功能的 监控设备,也大都停留在对声源数据记录存储的阶段,并不能提高监控设别的监控准确性。
技术实现要素:
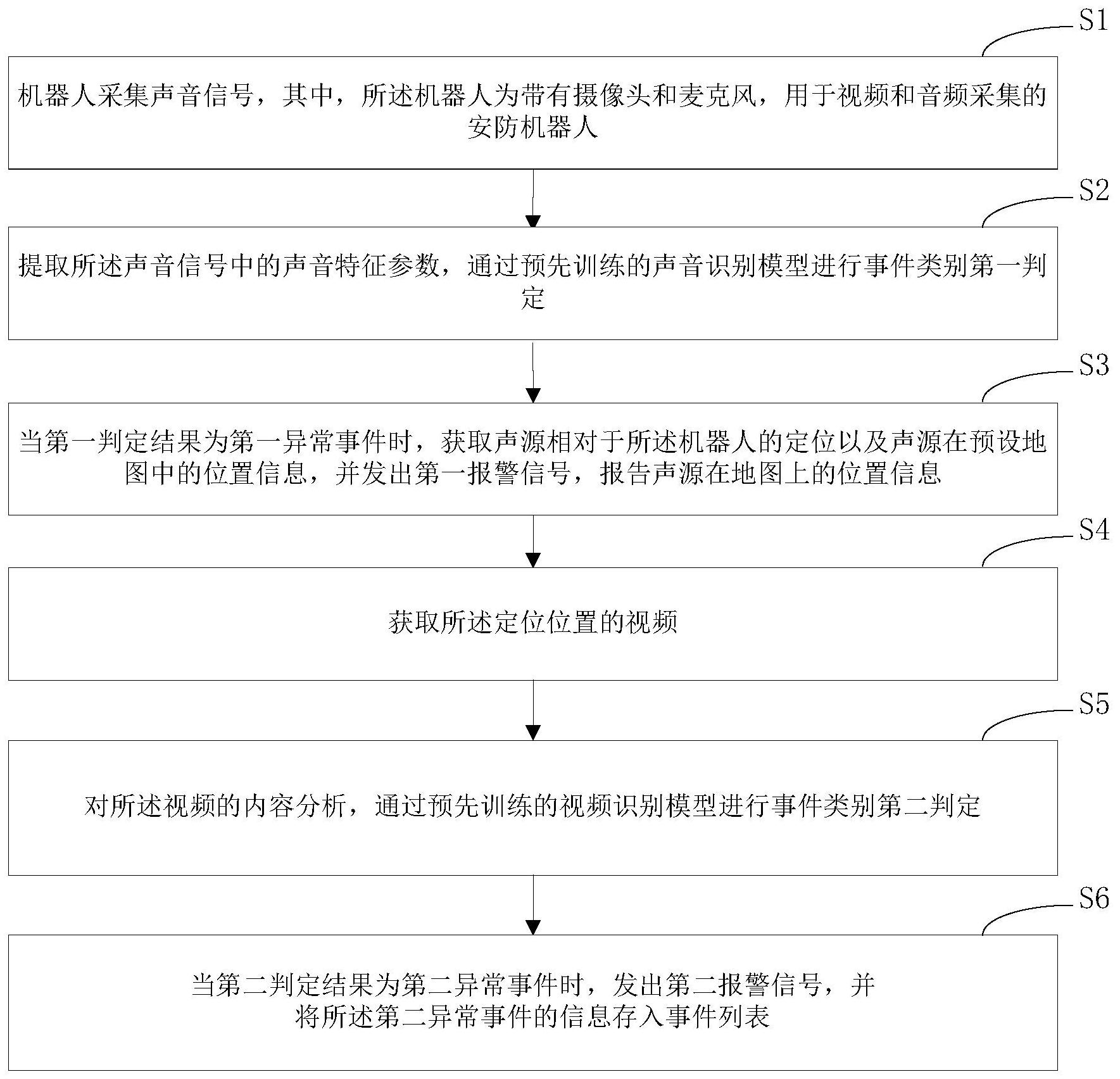
本申请的主要目的为提供一种安防监控方法、装置、机器人和存储介质,旨在解决 现有技术中监控时事件判定准确度低的技术问题。 为了实现上述发明目的,本申请提出一种安防监控方法,包括: 机器人采集声音信号,其中,所述机器人为带有摄像头和麦克风,用于视频和音频 采集的安防机器人; 提取声音特征参数,通过预先训练的声音识别模型进行事件类别第一判定; 当第一判定结果为第一异常事件时,获取声源相对于所述机器人的定位以及声源 在预设地图中的位置信息,并发出第一报警信号,报告声源在地图上的位置信息; 获取所述定位位置的视频; 对所述视频的内容分析,通过预先训练的视频识别模型进行事件类别第二判定; 当第二判定结果为第二异常事件时,发出第二报警信号,并将所述第二异常事件 的信息存入事件列表。 进一步地,采集所述声音信号的麦克风为单向麦克风组成的阵列,所述阵列的设 置方式满足各个麦克风朝向不同的接收方向,所述获取声源相对于所述机器人的定位的步 骤,包括: 比较所述麦克风阵列中各单个麦克风接收到的声音信号的功率大小; 按照从大到小的顺序选择预定数量个麦克风的声音信息; 采用TDOA方法计算声源的定位。 进一步地,所述获取声源相对于所述机器人的定位以及声源在预设地图中的位置 信息的步骤,包括: 持续获取所述声源相对于机器人的定位以及声源在地图中的位置信息,生成声源 4 CN 111601074 A 说 明 书 2/10 页 在地图上的移动轨迹。 进一步地,所述获取所述定位位置的视频的步骤,包括: 检测所述视频中是否存在运动目标,若存在运动目标,对运动目标进行跟踪。 进一步地,对所述视频的内容分析,通过预先训练的视频识别模型进行事件类别 第二判定的步骤之后,包括: 当所述第一异常事件和所述第二异常事件不一致时,将所述视频、第一异常事件 和第二异常事件发送给指定的账户; 接收所述账户反馈的基于人工判定的结果,更新所述声音识别模型或视频识别模 型的训练样本集。 进一步地,所述预先训练的声音识别模型的获得方法,包括: 构建包含正常事件声音的训练样本集和包含异常事件声音的训练样本集; 提取所述训练样本集的声谱图,输入卷积神经网络进行训练,获得所述声音识别 模型。 进一步地,所述预先训练的视频识别模型的获得方法,包括: 构建包含正常事件视频的训练样本集和包含异常事件视频的训练样本集; 提取所述训练样本集的C3D特征,输入3D卷积神经网络进行训练,获得所述视频识 别模型。 进一步地,所述声音识别模型和/或视频识别模型部署于区块链中。 本申请还提供一种安防监控装置,包括: 采集单元,用于机器人采集声音信号,其中,所述机器人为带有摄像头和麦克风, 用于视频和音频采集的安防机器人; 第一识别单元,用于提取声音特征参数,通过预先训练的声音识别模型进行事件 类别第一判定; 获取发送单元,用于当第一判定结果为第一异常事件时,获取声源相对于所述机 器人的定位以及声源在预设地图中的位置信息,并发出第一报警信号,报告声源在地图上 的位置信息; 获取视频单元,用于获取所述定位位置的视频; 第二识别单元,用于对所述视频的内容分析,通过预先训练的视频识别模型进行 事件类别第二判定; 发送存储单元,用于当第二判定结果为第二异常事件时,发出第二报警信号,并将 所述第二异常事件的信息存入事件列表。 本申请还提供一种机器人,包括存储器和处理器,所述存储器存储有计算机程序, 所述处理器执行所述计算机程序时实现上述任一项所述方法的步骤。 本申请还提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程 序被处理器执行时实现上述任一项所述的方法的步骤。 本申请的安防监控方法、装置、机器人和存储介质,在对声音判定为异常时,及时 发出报警信号,及时报告异常声源的位置信息,便于相关人员前往查看或根据情况准备应 对。之后,获取声源位置的视频,并解析视频进行二次事件的判断,当第二次判定为异常事 件的时候,生成事件列表,可以辅助相关人员快速查看事件信息。本申请通过两次判定,提 5 CN 111601074 A 说 明 书 3/10 页 高监控的可靠性。 附图说明 图1为本申请一实施例的安防监控方法的流程示意图; 图2为本申请一实施例的安防监控装置的结构示意框图; 图3为本申请一实施例的机器人的结构示意框图。 本申请目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。











