
技术摘要:
本发明公开了一种辅以Openstreetmap(OSM)信息的城市道路高分遥感自适应提取方法,其特征在于,包括以下步骤:1)计算遥感影像改进的差分形态轮廓(MDMP)特征;2)对OSM道路线状矢量数据按照相交节点进行多部件要素拆分,获取n个路段的OSM道路线状矢量信息;3)计算OSMi道路 全部
背景技术:
城市道路信息是城市中重要的基础地理信息,在城市规划,可持续发展和城市应 急中发挥着至关重要的作用。然而,由于城市化进程的加快,导致应用时效性的需求不断提 高,使得传统的监测方法(如:实地勘测和航空摄影测量)难以满足实际需求。伴随着高分辨 率卫星技术的快速发展和应用,高分遥感以高精细、快速和大区域等优势成为城市道路检 测的理想数据源。 目前基于高分遥感的城市道路提取方法主要采用阈值分割或者监督分类法,即通 过确定道路的阈值或者样本,进行图像分割或者机器学习模型构建,从而进行城市道路的 提取。然而,由于城市道路的复杂性,使得分割阈值或者样本难以确定,导致城市道路提取 精度难以得到保证。当前应用效果较好的方法是基于Openstreetmap(OSM)道路信息产品的 高分遥感道路分割方法(Liu ,B.,Wu ,H .Y .,Wang ,Y .D .,and Liu ,W .M .2015“. Main Road Extraction from ZY-3Grayscale Imagery Based on Directional Mathematical Morphology and VGI Prior Knowledge in Urban Areas”.Plos One,10)。这种方法引入 OSM道路信息产品作为先验知识进行自适应学习,并未较好的解决城市道路多样性所带来 的阈值差异性提取问题。
技术实现要素:
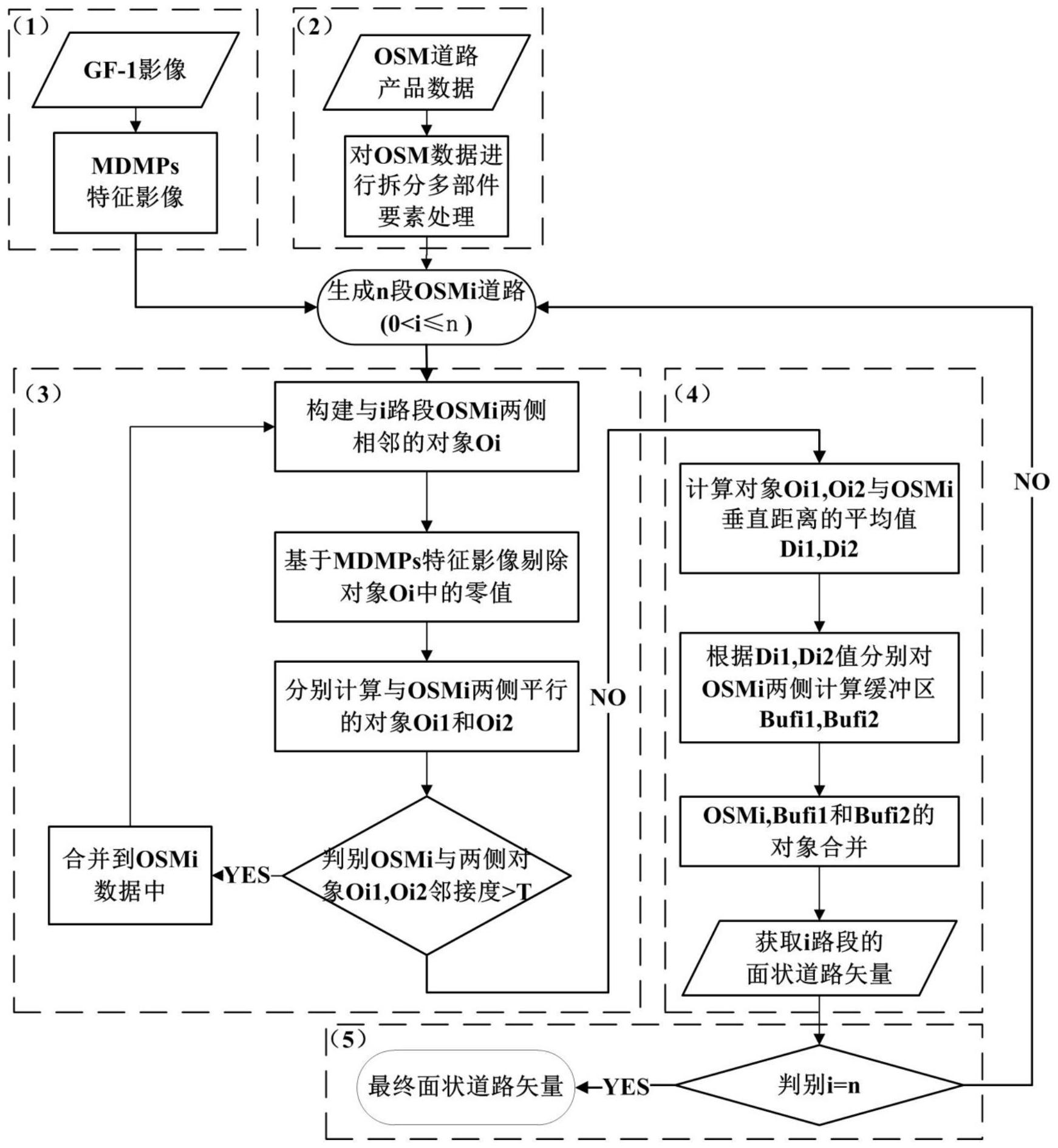
本发明解决的技术问题是:克服现有技术的不足,提供了一种辅以Openstreetmap 信息的城市道路高分遥感自适应提取方法,充分利用Openstreetmap道路产品线状样本的 逐路段性和两侧性的属性信息,将遥感智能解译中表达道路信息的形态学特征与地学专家 知识的自适应学习算法相结合,提出一种基于Openstreetmap道路线状信息样本的自适应 学习方法,进行逐路段双侧自适应分割,实现城市面状道路的自动化信息提取。 本发明目的通过以下技术方案予以实现:一种辅以Openstreetmap信息的城市道 路高分遥感自适应提取方法,所述方法包括如下步骤:1)计算遥感影像改进的差分形态轮 廓特征图像;2)对OSM道路线状矢量数据按照相交节点进行多部件要素拆分,获取n个路段 的OSMi道路线状矢量信息,其中,i=0、1……n;3)计算OSMi道路线状矢量信息与其两侧相邻 对象Oi之间的邻接度,通过邻接度阈值获取第一备选道路对象Oi1和第二备选道路对象Oi2; 4)根据第一备选道路对象Oi1到OSMi的垂直距离Di1和第二备选道路对象Oi2到OSMi的垂直距 离Di2,分别在OSMi道路线状矢量信息两侧生成面状道路,最终获取路段i的面状道路矢量。 上述辅以Openstreetmap信息的城市道路高分遥感自适应提取方法中,在步骤1) 中,遥感影像改进的差分形态轮廓特征图像为: 5 CN 111553928 A 说 明 书 2/6 页 其中,DMPsW-TH(d,s,t)为形态学白色礼帽差值序列; 形态学白色礼帽差值序列DMPsW-TH(d,s,t)的计算方法为: DMPsW-TH(d,s,t)=|MPW-TH(di,(sj Δs) ,(tk Δt))-MPW-TH(di,sj,tk)|; 其中,MPsW-TH(di,sj,tk)为多尺度形态学白色礼帽; 多尺度形态学白色礼帽MPsW-TH(di,sj,tk)的计算方法为: MPsW-TH(di,sj,tk)=W-TH(di,sj Δs,tk Δt); 其中,形态学白色礼帽W-TH(d,s,t)的计算方法为: 其中,DMP是差分形态学轮廓序列特征;d表示结构元素SE的方向;s和t分别为SE主 方向和次方向的尺度;i,j和k表示SE的方向,向量SE的主方向和次方向的向量取值;Nd和 Ns,t分别表示SE方向性,主方向和次方向向量的数量;Δs和Δt分别表示向量SE的主方向和 次方向尺度步长; 表示图像的形态学开重建。 上述辅以Openstreetmap信息的城市道路高分遥感自适应提取方法中,在步骤3) 中,计算OSMi道路线状矢量信息与其两侧相邻对象Oi之间的邻接度,通过邻接度阈值获取第 一备选道路对象Oi1和第二备选道路对象Oi2包括如下步骤: 3.1)提取OSMi道路线状矢量信息的相邻对象Oi; 3.2)剔除相邻对象Oi中MDMPs特征图像为0的像素值; 3.3)计算OSMi道路线状矢量信息与其相邻对象Oi之间的角度差D(Oi),通过角度差 的阈值获取平行于OSMi道路线状矢量信息的第一备选道路对象Oi1和第二备选道路对象 Oi2; 3.4)计算第一备选道路对象Oi1和第二备选道路对象Oi2与OSMi道路线状矢量信息 的邻接度; 3.5)设置阈值T,分别将两侧大于阈值T的第一备选道路对象Oi1和第二备选道路 对象Oi2合并到OSMi道路线状矢量信息中,并进行步骤3.1)至步骤3.4)的迭代计算,直至第 一备选道路对象Oi1和第二备选道路对象Oi2值小于阈值T时,停止迭代计算。 上述辅以Openstreetmap信息的城市道路高分遥感自适应提取方法中,在步骤 3.1)中,OSMi道路线状矢量信息的相邻对象Oi通过以下公式得到: 其中,v是影像;m是OSMi道路线状矢量信息所在影像v的目标对象;d是相邻对象到 目标对象m之间的距离;φ为空值;N为满足目标对象m和距离d条件的像素个数;i为OSMi道 路线状矢量信息n个路段中的第i个路段。 上述辅以Openstreetmap信息的城市道路高分遥感自适应提取方法中,在步骤 3.2)中,相邻对象Oi中MDMPs特征图像为0的像素值通过以下公式剔除: 6 CN 111553928 A 说 明 书 3/6 页 式中,DNMDMPs为MDMPs特征图像的像素值;i为OSMi道路线状矢量信息n个路段中的 第i个路段;Oi为OSMi道路线状矢量信息的相邻对象。 上述辅以Openstreetmap信息的城市道路高分遥感自适应提取方法中,在步骤 3.3)中,第一备选道路对象Oi1和第二备选道路对象Oi2通过以下公式得到: 其 中 , minOi(X,Y)为OSMi道路线状矢量信息相邻对象Oi中最小坐标的对象,maxOi(X,Y)为OSMi道路 线状矢量信息相邻对象Oi中最大坐标的对象;X,Y为Oi的坐标值;MDOSMi为OSMi道路线状矢量 信息的主要方向,MDOi为Oi对象的主要方向;XOSMi和YOSMi为OSMi道路线状矢量信息的中心坐 标值,VarXOSMiYOSMi为OSMi道路线状矢量信息的中心坐标协方差,VarYOSMi为OSMi道路线状矢 量信息Y值的方差;XOi和YOi分别为Oi对象的中心坐标值;VarXOiYOi为Oi对象的中心坐标协方 差;VarYOi为Oi对象的方差;D和MD分别为影像对象的角度差和主要方向;VarX,VarY和VarXY 分别代表坐标值X,Y的方差和协方差;λ为特征向量;k为角度差的阈值参数。 上述辅以Openstreetmap信息的城市道路高分遥感自适应提取方法中,在步骤 3.4)中,第一备选道路对象Oi1和第二备选道路对象Oi2与OSMi道路线状矢量信息的邻接度 通过以下公式得到: 其中,l为对象的长度;B为两侧相邻对象Oi1和Oi2与OSMi道路线状矢量信息的邻接 度;i为OSMi道路线状矢量信息n个路段中的第i个路段。 上述辅以Openstreetmap信息的城市道路高分遥感自适应提取方法中,在步骤4) 中,根据第一备选道路对象Oi1到OSMi的垂直距离Di1和第二备选道路对象Oi2到OSMi的垂直 距离Di2,分别在OSMi道路线状矢量信息两侧生成面状道路,最终获取路段i的面状道路矢量 包括如下步骤: 4.1)计算第一备选道路对象Oi1到OSMi的垂直距离Di1和第二备选道路对象Oi2到 OSMi的垂直距离Di2; 4.2)根据第一备选道路对象Oi1到OSMi的垂直距离Di1和第二备选道路对象Oi2到 OSMi的垂直距离Di2,在OSMi道路线状矢量信息两侧分别以Di1和Di2的宽度生成缓冲区Bufi1 和缓冲区Bufi2; 4.3)对道路对象OSMi道路线状矢量信息,缓冲区Bufi1和缓冲区Bufi2进行合并, 生成路段i的面状道路矢量。 上述辅以Openstreetmap信息的城市道路高分遥感自适应提取方法中,在步骤 4.1)中,第一备选道路对象Oi1到OSMi的垂直距离Di1为: 7 CN 111553928 A 说 明 书 4/6 页 第二备选道路对象Oi2到OSMi的垂直距离Di2为: 其中,Xu、Yu分别为第一备选道路对象Oi1的横坐标和纵坐标;Xv、Yv为第二备选道路 对象Oi2的横坐标和纵坐标;Di1为第一备选道路对象Oi1到路线状矢量信息的最短距离,Di2 为第一备选道路对象Oi2到路线状矢量信息的最短距离;Ni1为第一备选道路对象Oi1的集 合,Ni2为为第二备选道路对象Oi2的集合;u为集合Ni1中的所取对象,v为集合Ni2中的所取 对象;i为OSMi道路线状矢量信息n个路段中的第i个路段。 本发明与现有技术相比具有如下有益效果: 本发明的方法通过计算改进的差分形态学序列特征,提高了道路特征在高分遥感 影像中的显著度,降低了其他已混分地物类型的干扰;充分利用Openstreetmap道路产品线 状样本的逐路段性和两侧性的属性信息,进行逐路段双侧自适应学习,能够较大程度上解 决了城市道路多样性所带来的阈值差异性提取问题,最终实现城市面状道路的自动化信息 提取。 附图说明 通过阅读下文优选实施方式的详细描述,各种其他的优点和益处对于本领域普通 技术人员将变得清楚明了。附图仅用于示出优选实施方式的目的,而并不认为是对本发明 的限制。而且在整个附图中,用相同的参考符号表示相同的部件。在附图中: 图1是本发明实施例提供的辅以Openstreetmap信息的城市道路高分遥感自适应 提取方法的流程图; 图2是本发明实施例提供的采用的原始高分遥感影像的示意图; 图3是本发明实施例提供的改进差分形态轮廓(MDMP)特征图; 图4是本发明实施例提供的OSM预处理结果图; 图5是本发明实施例提供的最终i路段最终备选道路对象Oi1和Oi2图; 图6是本发明实施例提供的路段i的面状道路矢量结果图; 图7是本发明实施例提供的迭代计算路段i 1的面状道路矢量结果图; 图8是本发明实施例提供的城市道路最终提取结果图。











