
技术摘要:
本发明公开了一种面向监视系统的机动目标跟踪方法,包含以下步骤:S1、构建机动目标运动模型,估计目标的运动状态;S2、建立时刻t的目标关联假设集合及各目标对应的运动状态集合;S3、遍历上一个时刻目标关联假设集合中的每一个目标计算各目标当前时刻的运动状态的各种 全部
背景技术:
一般的目标跟踪方法如多假设跟踪方法,往往使用数据关联技术,在理论层面是 解决最优数据关联问题。但是目标跟踪系统往往可利用目标各类特征信息提升目标跟踪精 度,比如目标的运动特征等。然而目标机动运动特征是一类动态复杂的时间序列数据,目标 在各类运动模型中动态切换,学习运动模型的变化规律可以提升跟踪的有效性。通过构建 目标动态系统模型,可以将目标动态机动特征及系统参数纳入到动态系统模型中进行估 计。 对现有的文献检索发现,机动目标跟踪系统往往使用交互多模型方法及其各种改 进方法,通过定义多个可能的运动模型集合实现运动状态的混合估计,其核心思想是构建 不同的模型集合根据运动状态在不同的模型集合之间进行转换。交互多模型方法存在着未 知的模型集和模型选取的问题、未知的模型集合间转移概率选择等问题。实际上,在应用场 景中目标的机动运动模式未知并且运动模式数量随着时间累计不断增加,需要一种非参数 贝叶斯方法实现自适应学习模型参数的能力,提高跟踪精度和稳定性。
技术实现要素:
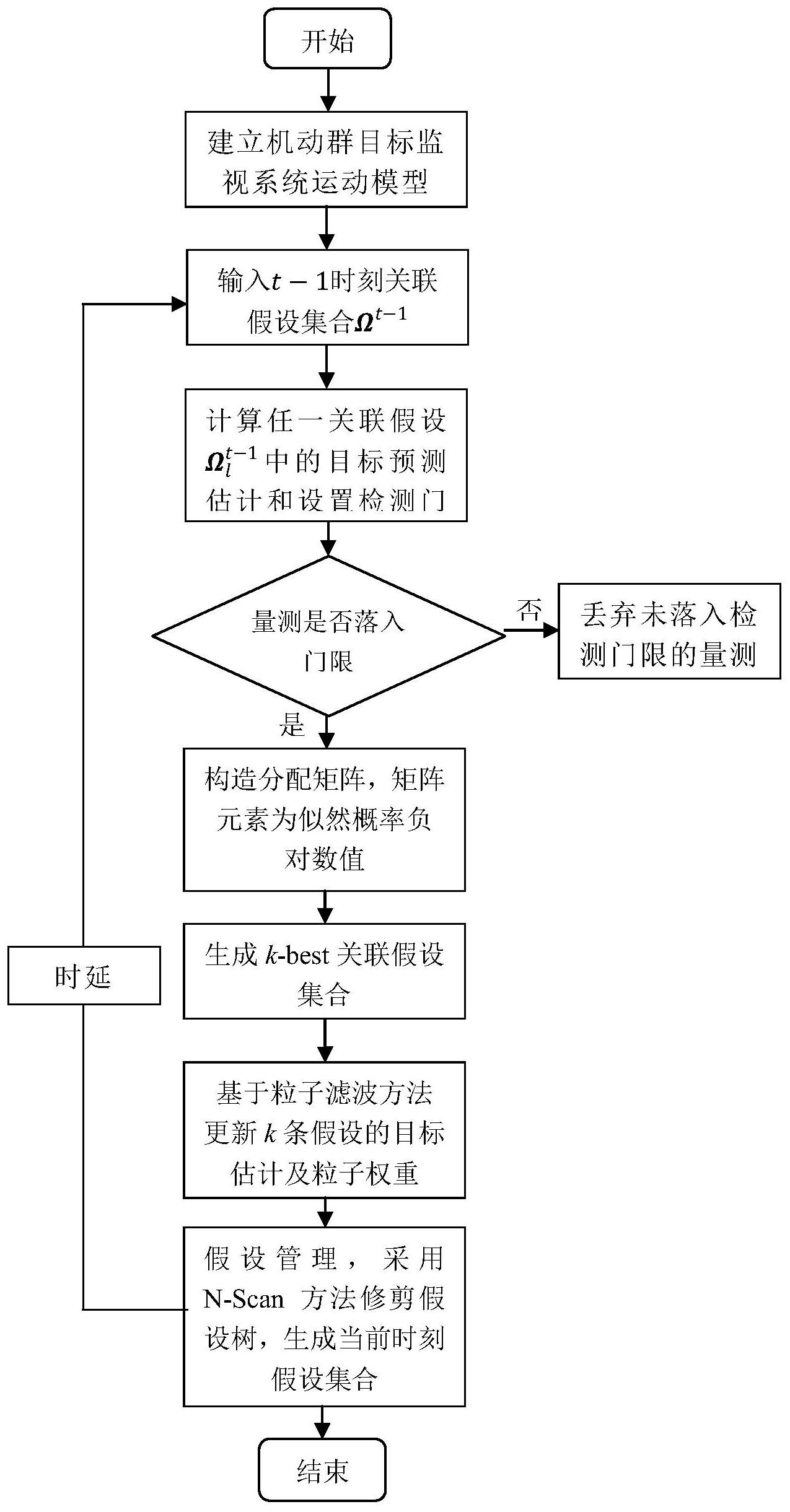
针对现有技术中的缺陷,本发明的目的是提供一种面向监视系统的机动目标跟踪 方法,对非参数贝叶斯方法中的分层狄利克雷过程(Hierarchical Dirichlet Processes, HDP)-隐马尔科夫模型(Hidden Markov Model,HMM)进行扩展,将HDP-HMM滤波算法与多假 设跟踪算法(Multiple Hypothesis Tracking,MHT)相结合,在监视环境中存在杂波干扰情 况下可以学习未知的运动状态变化,解决运动状态模型集未知和模型选取、未知的模型集 合间转移概率选择等问题,在跟踪过程中采用粒子滤波等方法联合估计运动模型和运动状 态。 本发明的发明目的通过以下技术方案实现: 一种面向监视系统的机动目标跟踪方法,包含以下步骤: S1、构建机动目标运动模型,估计目标的运动状态; S2、建立时刻t的目标关联假设集合Ωt,目标关联假设集合Ωt包含目标的运动状 态和观测之间可能的关联组合及各目标的运动状态的集合; S3、根据上一个时刻t-1目标关联假设集合Ωt-1及与各目标对应的运动状态集合, 遍历目标关联假设集合 中的每一个假设及目标,利用卡尔曼滤波器计算各目标当前 时刻t目标的运动状态的各种可能运动模式; S4、根据S3已经得到的每个目标的运动状态的可能运动模式和当前时刻落入跟踪 门的量测集,构造量测-目标分配矩阵,计算和保留前K个置信度最高的目标关联假设,更新 7 CN 111582159 A 说 明 书 2/8 页 目标关联假设集合中目标和观测之间可能的关联假设; S5、基于当前时刻目标关联假设集合及与各目标对应的运动状态集合采用卡尔曼 滤波器方法更新各目标对应的运动状态集合。 与现有技术相比,本发明具有如下的有益效果: 1、本发明提出了一种面向监视系统的机动目标跟踪方法通过构建目标动态系统 模型,估计未知的运动模式数量和模式间的变迁关系。与标准的IMM方法相比,无需知道运 动模式的数量和转移概率,提高了跟踪精度,可应用于高速高机动目标跟踪领域。所提出的 算法可以采用对量测迭代处理的实现方式,使得计算复杂度符合实际工程需求。 2、本发明将面向航迹的多假设跟踪方法与分层狄利克雷过程-隐马尔科夫模型相 结合来处理杂波环境下机动目标跟踪,实现目标航迹起始、数据关联、假设生成、假设管理 和航迹维持等功能,并且考虑使用多运动模式下的复合估计简化计算,使得计算复杂度符 合实际工程需求。 3、本发明利用粒子滤波方法,并降低系统采样空间的维数提高粒子采样效率,给 出了在线计算方法。算法框架清晰利于实现,从而为复杂环境下的机动目标跟踪系统提供 了重要的技术支持。 附图说明 图1为一种面向监视系统的机动目标跟踪方法的流程示意图。











