
技术摘要:
本发明提供了一种无人机刹车用机电作动器,包括无刷电机;所述无刷电机的输出前端安装有丝杠螺母且无刷电机带动丝杠螺母旋转,丝杠螺母套装在丝杆上构成丝杠副,丝杆外端一体设置刹车推杆,有位置传感器安装在刹车推杆的侧面。本发明通过锥齿轮传动、展开式齿轮传动、 全部
背景技术:
目前较为常见的无人机刹车作动器为液压或气压作动器,结构复杂,维护困难,可 靠性低,也有电磁式和电动式,电磁式结构较简单,但无法实现刹车力线性控制,无法实现 平顺可靠刹车,电动式一般采用梯形丝杠实现刹车推杆直线运动,工作效率低,响应时间较 大,传感器集成度低。
技术实现要素:
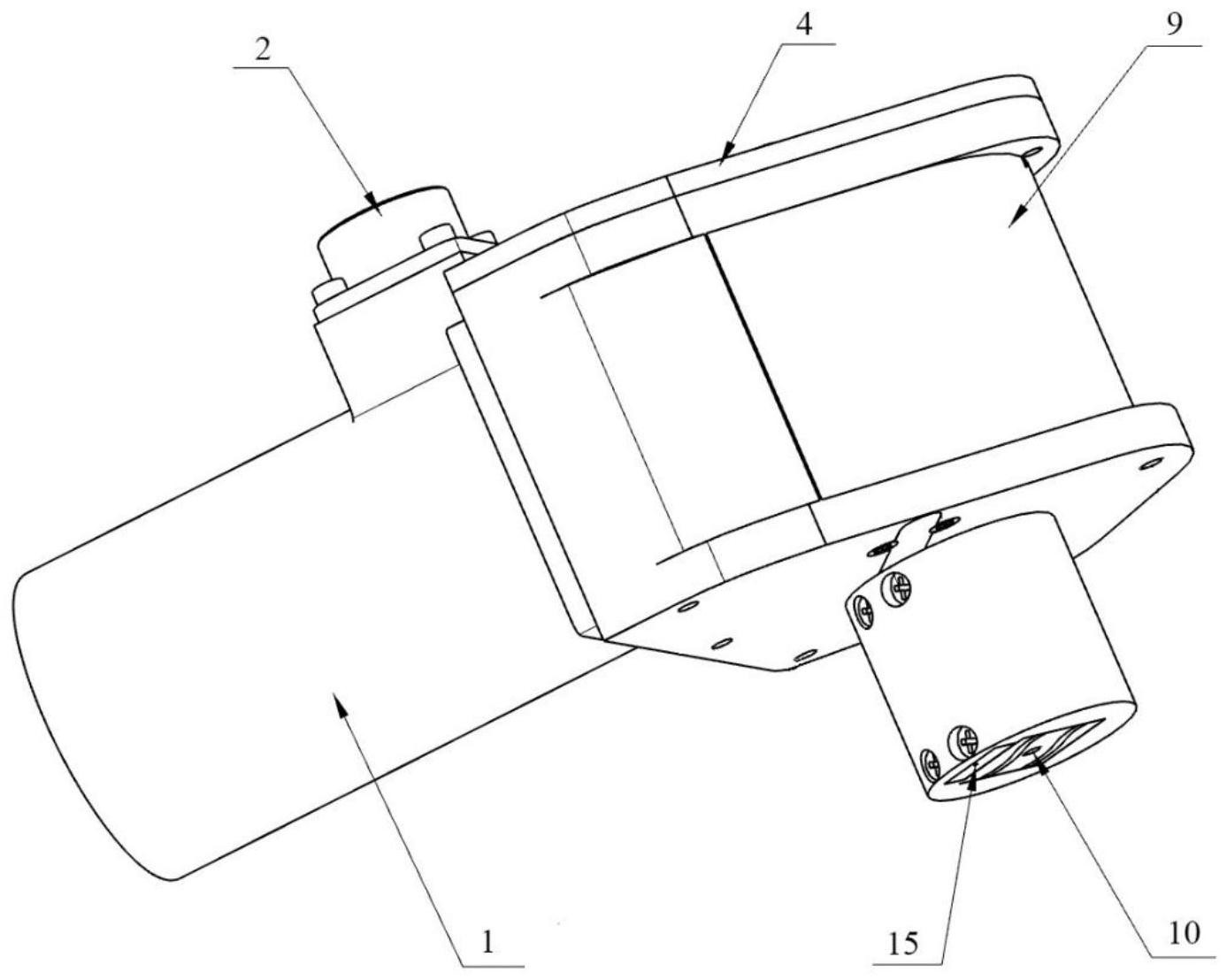
为解决上述技术问题,本发明提供了一种无人机刹车用机电作动器,该无人机刹 车用机电作动器能有效解决现有技术电动式无人机刹车作动器普遍存在的工作效率低、响 应时间较大、传感器集成度低的技术问题,满足无人机刹车系统自动化、智能化控制的需 要。 本发明通过以下技术方案得以实现。 本发明提供的一种无人机刹车用机电作动器,包括无刷电机;所述无刷电机的输 出前端安装有丝杠螺母且无刷电机带动丝杠螺母旋转,丝杠螺母套装在丝杆上构成丝杠 副,丝杆外端一体设置刹车推杆,有位置传感器安装在刹车推杆的侧面。 所述丝杠螺母、丝杆均安装在机壳内,刹车推杆位于机壳外。 在机壳上相对于刹车推杆所在侧面的另一侧,设置安装有电连接器,电连接器安 装在机壳在该处的盖板上并由侧面出线,盖板正面集成安装有力传感器,盖板正面中心有 丝杆过孔。 所述力传感器为压阻式力传感器,盖板上位于力传感器的安装位置底侧沿有环形 受力面。 所述无刷电机的输出端依次通过主动锥齿轮、从动锥齿轮、主动圆柱齿轮、从动圆 柱齿轮实现带动丝杠螺母旋转的动力传递,主动锥齿轮、从动锥齿轮、主动圆柱齿轮、从动 圆柱齿轮均安装在机壳内。 所述刹车推杆为方形柱体。 所述位置传感器由滑块、电阻片、底座组成,滑块固定于刹车推杆的侧面且滑块可 在底座上滑动,底座在刹车推杆内部并固定于机壳,电阻片固定于滑块底部并和滑块形成 接触配合。 所述机壳为不锈钢材质制成。 本发明的有益效果在于:通过锥齿轮传动、展开式齿轮传动、滚珠丝杠,将无刷电 机的高速旋转运动转化为刹车推杆的直线运动,并且集成了力传感器和位移传感器,能够 反馈刹车力和刹车推杆的位置信号,采用了工作效率较高的齿轮传动和滚珠丝杠传动,并 且将力传感器与盖板集成结构设计,采用组合电阻片式直线位置传感器,大大增加了空间 3 CN 111550507 A 说 明 书 2/3 页 利用率,降低了整机重量,在整机重量不大于600g,额定功率115W时,能够提供不小于1800N 的刹车力,从而整体能很好的满足无人机刹车系统自动化、智能化控制的需要,相对于现有 技术而言重量更轻、可靠性更高。 附图说明 图1是本发明的结构示意图; 图2是图1的正试图; 图3是图2中A-A面剖视图; 图4是图1的俯视局部剖视图; 图5是图1中电连接器的结构示意图; 图6是图1中刹车推杆的结构示意图; 图7是图1中位置传感器的结构示意图; 图8是图1的安装示意图; 图9是图8的侧视图。 图中:1-无刷电机,2-电连接器,3-定位销,4-力传感器,5-轴承支架,6-第一角接 触轴承,7-从动圆柱齿轮,8-丝杠螺母,9-机壳,10-刹车推杆,11-主动锥齿轮,12-从动锥齿 轮,13-主动圆柱齿轮,14-角接触轴承,15-位置传感器,151-滑块,152-电阻片,153-底座, 16-丝杆,17-刹车盘,18-刹车片。











