
技术摘要:
本发明公开了一种开绕组永磁同步电机的相电流重构方法及控制系统,属于电机领域。包括:以逆变器II各桥臂的上开关管驱动信号为触发源,采集各触发时刻母线电流值和逆变器II各桥臂的上开关管驱动信号高电平总数,根据母线电流值和高电平总数获取带零序分量的三相电流值 全部
背景技术:
随着世界能源匮乏及环境污染问题日益严重,传统电气行业也在向着绿色化、多 元化的方向发展,新能源领域的发展越来越受到人们重视,而电动汽车和风力发电等行业 正是其中最受关注的。 传统星接绕组电机系统由于受制于电池容量瓶颈或单个开关器件耐压等级约束, 同时升压模块引入储能电感,稳压电容等,增加了控制系统重量及体积,在电动汽车或风力 发电系统中难以满足提高功率等级、提升系统性能等发展需求。因此,双逆变器拓扑开绕组 永磁同步电机应运而生。双逆变器拓扑开绕组永磁同步电机方案相比于传统星接绕组电机 系统,具有提高母线电压利用率和系统功率等级的显著优势,不足之处在于共直流母线开 绕组拓扑不可避免地引入了零序电流问题。 与此同时,在采用矢量控制的电机驱动系统中,需要实时检测绕组相电流,以计算 定子电流磁链、转矩分量反馈值进行闭环控制。传统三相电机控制系统中至少需要两个电 流传感器,而开绕组电机系统中由于三相电流之和不为零,至少需要三个电流传感器。多传 感器之间的参数差异会在电流检测时产生直流偏置误差及增益误差,且多个传感器增加了 驱动系统体积、成本,阻碍系统市场工业化发展。 对此,相电流重构技术是减少传感器数量、提升系统性能的有效手段。然而,采用 基于比例谐振控制器(PR控制器)的零矢量重新分配技术虽能有效解决开绕组拓扑引入的 零序电流问题,但同时会带来开关周期内矢量组合复杂化、矢量作用时间缩短等问题,使得 相电流重构技术无法直接在该驱动控制系中应用。
技术实现要素:
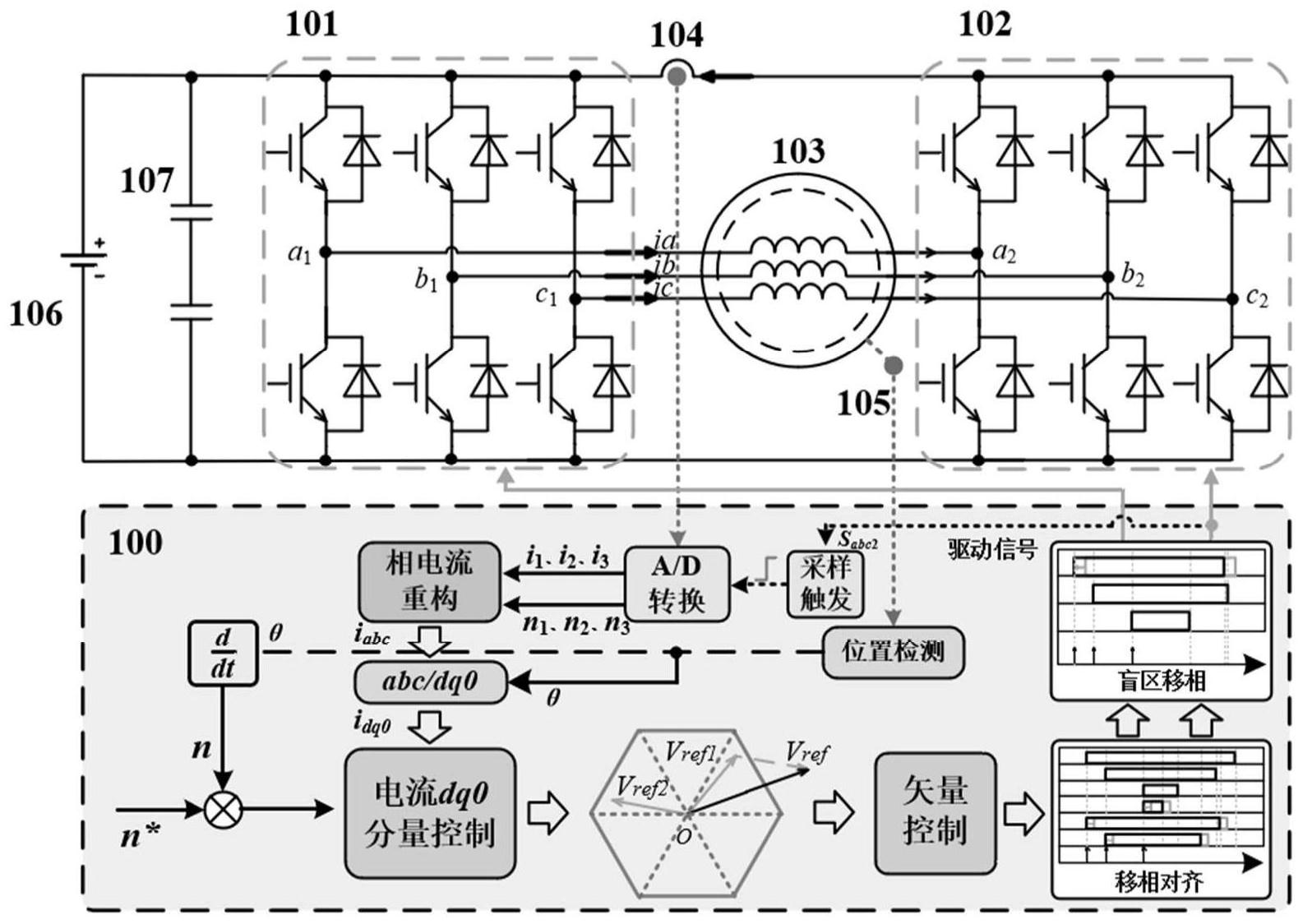
针对现有技术的缺陷,本发明的目的在于提供一种开绕组永磁同步电机的相电流 重构方法及控制系统,旨在解决开绕组拓扑中零序电流抑制策略与相电流重构策略无法兼 容的问题。 为实现上述目的,本发明的一方面提供了一种开绕组永磁同步电机的相电流重构 方法,包括以下步骤: S1、以逆变器II各桥臂的上开关管驱动信号为触发源,采集各触发时刻母线电流 值和所述逆变器II各桥臂的上开关管驱动信号高电平总数,根据所述母线电流值和高电平 总数获取带零序分量的三相电流值; S2、采集电机当前转子位置,并将所述三相电流值坐标变换至dq0坐标系作为反 馈,进行定子电流的磁链分量、转矩分量和零序分量控制; S3、根据比例谐振控制器所需零序电压的正负情况,对逆变器I的桥臂驱动信号和 4 CN 111585483 A 说 明 书 2/6 页 所述逆变器II的桥臂驱动信号进行移相对齐;其中,所述逆变器I是较靠近电源的逆变器, 所述逆变器II是较远离电源的逆变器; S4、根据矢量作用时间实施盲区移相,输出120°调制的SVPWM双逆变器驱动信号, 驱动并控制电机。 进一步地,对逆变器I的桥臂驱动信号和所述逆变器II的桥臂驱动信号进行移相 对齐包括: 若所述比例谐振控制器所需零序电压为正,则重新分配零矢量后,将所述逆变器 II桥臂驱动信号Sa2、Sb2、Sc2分别向所述逆变器I的桥臂驱动信号Sc1、Sa1、Sb1对齐;否则,将所 述逆变器I的桥臂驱动信号Sa1、Sb1、Sc1分别向所述逆变器II的桥臂驱动信号Sb2、Sc2、Sa2对 齐。 进一步地,当采集的所述母线电流值为上母线电流时,所述步骤S1具体包括: 检测到电机各相绕组对应所述逆变器II的上桥臂开关管驱动信号上升沿时,分别 采集一次母线电流值和所述逆变器II各桥臂的上开关管驱动信号高电平总数,共采样三 次,并将所述逆变器II各桥臂的上开关管驱动信号高电平总数n1、n2、n3分别作为对应所述 母线电流值i1、i2、i3的标志位; 开关周期内所述母线电流值i1、i2、i3减去对应标志位差值为1的母线电流值,计算 带零序分量的三相电流值ia、ib、ic; 对逆变器I的桥臂驱动信号和所述逆变器II的桥臂驱动信号进行移相对齐时,具 体是将桥臂驱动信号的上升沿对齐。 进一步地,当采集的所述母线电流值为下母线电流时,所述步骤S1具体包括: 检测到电机各相绕组对应所述逆变器II的上桥臂开关管驱动信号下降沿时,分别 采集一次母线电流值和所述逆变器II各桥臂的上开关管驱动信号高电平总数,共采样三 次,根据所述逆变器II各桥臂的上开关管驱动信号高电平总数得到低电平总数,并将所述 低电平总数n1、n2、n3分别作为对应所述母线电流值i1、i2、i3的标志位; 开关周期内所述母线电流值i1、i2、i3减去对应标志位差值为1的母线电流值,计算 带零序分量的三相电流值ia、ib、ic; 对逆变器I的桥臂驱动信号和所述逆变器II的桥臂驱动信号进行移相对齐时,具 体是将桥臂驱动信号的下降沿对齐。 进一步地,所述根据矢量作用时间实施盲区移相包括: 若有效矢量作用时间不满足矢量最小保持时间要求,则在采取移相对齐双逆变器 对应边沿操作同时移相错开双逆变器对应相开关信号,增加矢量作用时间,若有效矢量作 用时间满足矢量最小保持时间要求,则不对开关信号操作。 进一步地,还包括,采用基于比例谐振控制器零矢量重新分配策略以抑制零序电 流: 若所述比例谐振控制器输出零序电压为正,则所述逆变器I增加开关周期内矢量7 作用时间,所述逆变器II增加开关周期内矢量0作用时间,否则所述逆变器I增加开关周期 内矢量0作用时间,所述逆变器II增加开关周期内矢量7作用时间。 本发明的另一方面提供了一种基于上述相电流重构方法的控制系统,包括 控制器,用于执行所述相电流重构方法; 5 CN 111585483 A 说 明 书 3/6 页 开绕组逆变器,用于为所述开绕组永磁同步电机提供带共模成分的三相电压,抑 制电机绕组电流零序成分; 电流传感器,用于测量母线电流信号; 位置传感器,用于测量转子位置信号。 进一步地,所述电流传感器置于所述开绕组逆变器的上母线位置或下母线位置。 通过本发明所构思的以上技术方案,与现有技术相比,通过提供一种兼容零序电 流抑制策略与相电流重构策略的移相对齐方法,避免了在运用零矢量重新分配技术时导致 的开关周期内矢量组合复杂化、矢量作用时间缩短等问题,从而在抑制电机绕组相电流中 的零序成分的同时,减少了传感器使用数量。 附图说明 图1是本发明实施例开绕组永磁同步电机驱动及系统控制框图; 图2是本发明实施例矢量组合6-3′作用时母线电流状态示意图; 图3是本发明实施例开绕组双逆变器零矢量重新分配示意图; 图4(a)是本发明实施例Δt>0时移相对齐策略示意图; 图4(b)是本发明实施例Δt<0时移相对齐策略示意图; 图5是本发明实施例相电流重构盲区示意图; 图6(a)是本发明实施例扇区边界盲区移相示意图; 图6(b)是本发明实施例低调制区盲区移相示意图。











