
技术摘要:
本发明涉及移动机器人技术领域,公开了一种定位方法,应用于移动机器人,移动机器人包括一雷达传感器,该方法包括:获取移动机器人在预设地图中的初始位姿,以及雷达数据,根据初始位姿将雷达数据映射到预设地图上,生成映射点云;判断映射点云是否包括第一直线数据段 全部
背景技术:
随着技术的发展和人们生活水平的提高,诸如清洁机器人、服务机器人、远程监控 机器人、移动机器人等移动机器人逐渐进入人们的生活中。基于激光雷达的清扫机器人通 常需要根据激光雷达的感知数据进行环境地图的构建,在建图过程需要实时估计机器人的 位姿(位置和方向)。 常规的定位方法是通过里程计提供一个定位初始值,该定位初始值的准确性受里 程计模型、打滑、噪声等因素的影响,通常与真实值存在误差,且方向误差大于位置误差,通 过设定一个搜索范围和采样间隔,搜索范围包括位置范围和角度范围,从而确定候选位姿, 此方式进行定位的精度与采样间隔的大小密切相关,采样间隔越小,定位精度越高,反之, 越低。采样间隔越小,候选位姿数就越多,计算量就越大,不利于系统的实时性。由于里程计 的方向误差较大,真正的方向可能会在搜索角度范围的边缘,甚至超出角度搜索范围,使匹 配结果变差,得不到最好的位姿。 有鉴于此,现有技术亟待改进。
技术实现要素:
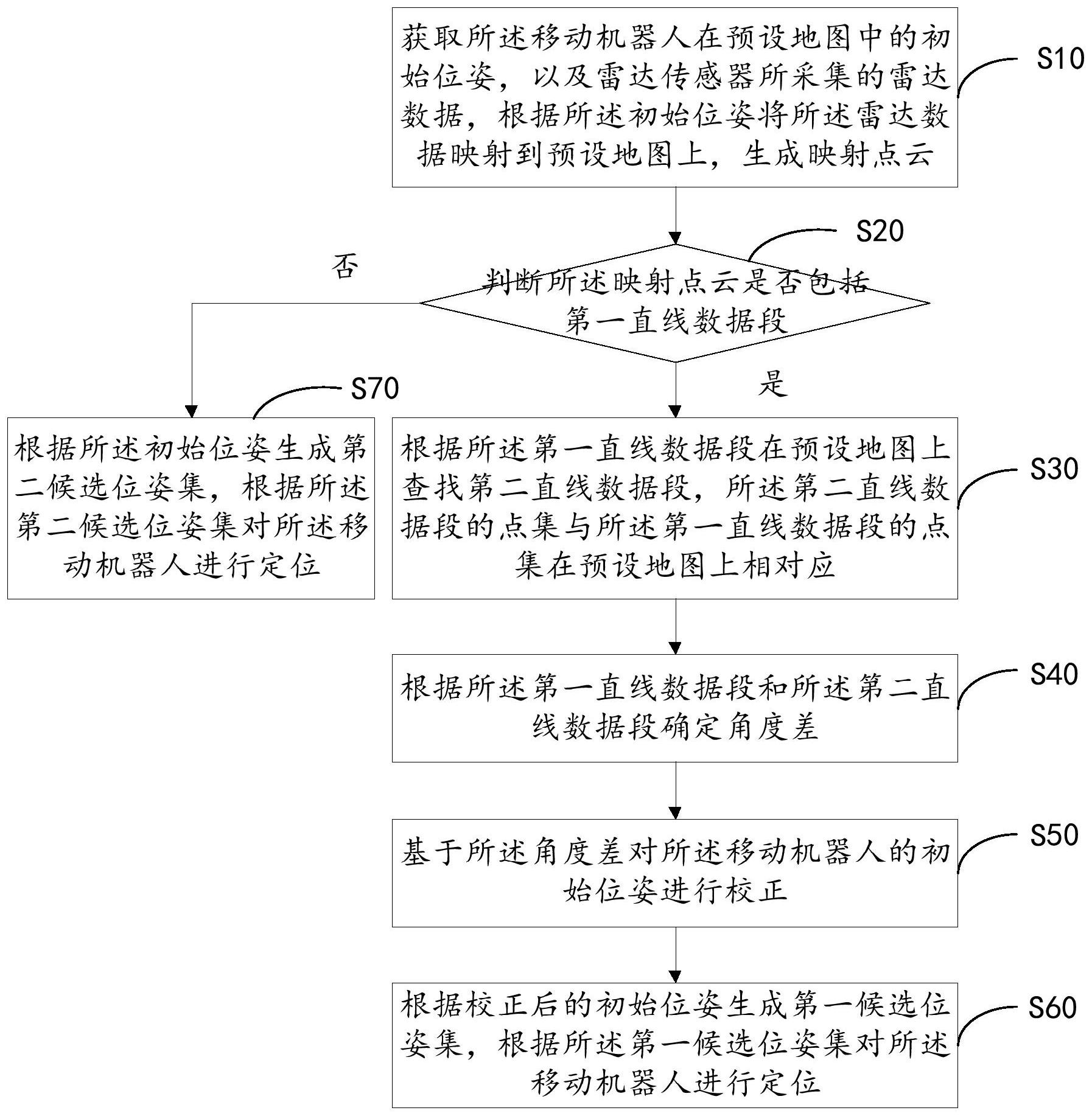
为了解决上述技术问题,本发明实施例提供一种定位方法、装置、移动机器人及存 储介质,解决目前通过搜索范围和采样间隔定位存在计算量大的技术问题,减少计算量,并 提高角度估计的准确性。 为了解决上述技术问题,本发明实施例提供以下技术方案: 第一方面,本发明实施例提供一种定位方法,应用于移动机器人,其特征在于,所 述移动机器人包括一雷达传感器,所述方法包括: 获取所述移动机器人在预设地图中的初始位姿,以及雷达传感器所采集的雷达数 据,根据所述初始位姿将所述雷达数据映射到预设地图上,生成映射点云; 判断所述映射点云是否包括第一直线数据段, 若判断为是,则根据所述第一直线数据段在预设地图上查找第二直线数据段,所 述第二直线数据段的点集与所述第一直线数据段的点集在预设地图上相对应,根据所述第 一直线数据段和所述第二直线数据段确定角度差,基于所述角度差对所述移动机器人的初 始位姿进行校正,并根据校正后的初始位姿生成第一候选位姿集,根据所述第一候选位姿 集对所述移动机器人进行定位; 若判断为否,则根据所述初始位姿生成第二候选位姿集,根据所述第二候选位姿 集对所述移动机器人进行定位。 在一些实施例中,所述根据所述第一直线数据段和所述第二直线数据段确定角度 4 CN 111590595 A 说 明 书 2/12 页 差,包括: 所述第一直线数据段包括映射点集,对所述映射点集进行直线拟合,确定第一直 线方程,根据所述第一直线方程确定所述第一直线数据段在预设地图中的第一直线角度; 在预设地图上查找与所述第一直线数据段的映射点集对应的障碍点集,对所述障 碍点集进行直线拟合,确定第二直线方程,根据所述第二直线方程确定所述障碍点集在预 设地图中的第二直线角度; 计算第一直线角度和第二直线角度的角度差。 在一些实施例中,所述根据所述第一直线数据段和所述第二直线数据段确定角度 差,包括: 若识别到所述雷达数据中的多个第一直线数据段,则确定每一第一直线数据段对 应的直线方程,确定多个第一直线角度; 计算多个第一直线角度与第二直线角度的多个角度差,对多个角度差求平均值, 将平均值作为所述第一直线角度和第二直线角度的角度差。 在一些实施例中,所述基于所述角度差对所述移动机器人的初始位姿进行校正, 包括: 确定所述移动机器人在预设地图中的初始位姿为(x,y,ψ); 所述根据所述第一直线数据段和所述第二直线数据段确定角度差,基于所述角度 差对所述移动机器人的初始位姿进行校正,包括: 所述角度差为δψ,校正后的初始位姿为(x,y,ψ δψ)。 在一些实施例中,所述根据校正后的初始位姿生成第一候选位姿集,包括: 根据预设的第一搜索范围,生成第一候选位姿集,其中,所述第一搜索范围包括第 一角度搜索范围和第一位置搜索范围,所述第一角度搜索范围和所述第一位置搜索范围根 据校正后的初始位姿生成。 在一些实施例中,所述根据所述初始位姿生成第二候选位姿集,包括: 根据预设的第二搜索范围,生成第二候选位姿集,其中,所述第二搜索范围包括第 二角度搜索范围、第二位置搜索范围,所述第二角度搜索范围大于所述第一角度搜索范围。 在一些实施例中,所述根据所述第一直线数据段在预设地图上查找第二直线数据 段,包括: 根据所述初始位姿确定所述雷达传感器的中心在所述预设地图上的中心映射点; 所述第一直线数据段的点集包括多个映射点,确定由所述中心映射点出发朝所述 多个映射点延伸的多条扫描射线; 在所述多条扫描射线方向上分别查找与所述多个映射点对应的多个障碍点,每一 所述障碍点与相邻的映射点的距离满足预设距离范围,所述多个障碍点形成所述第二直线 数据段。 在一些实施例中,在获取雷达传感器发送的雷达数据之后,所述方法还包括: 将所述雷达数据从极坐标系转换为雷达坐标系; 再将所述雷达数据从雷达坐标系转换为地图坐标系。 第二方面,本发明实施例提供一种定位装置,应用于移动机器人,所述移动机器人 包括一雷达传感器,所述装置包括: 5 CN 111590595 A 说 明 书 3/12 页 映射单元,用于获取所述移动机器人在预设地图中的初始位姿,以及雷达传感器 所采集的雷达数据,根据所述初始位姿将所述雷达数据映射到预设地图上,生成映射点云; 判断单元,用于判断所述映射点云是否包括第一直线数据段, 位姿校正单元,用于根据所述判断单元的判断结果执行步骤:若判断为是,则根据 所述第一直线数据段在预设地图上查找第二直线数据段,所述第二直线数据段的点集与所 述第一直线数据段的点集在预设地图上相对应,根据所述第一直线数据段和所述第二直线 数据段确定角度差,基于所述角度差对所述移动机器人的初始位姿进行校正,并根据校正 后的初始位姿生成第一候选位姿集,根据所述第一候选位姿集对所述移动机器人进行定 位; 若判断为否,则根据所述初始位姿生成第二候选位姿集,根据所述第二候选位姿 集对所述移动机器人进行定位。 第三方面,本发明实施例提供一种移动机器人,包括: 至少一个处理器;和 与所述至少一个处理器通信连接的存储器;其中, 所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一 个处理器执行,以使所述至少一个处理器能够执行上述的定位方法。 第四方面,本发明实施例提供一种计算机可读存储介质,其上存储有计算机程序, 其特征在于,所述计算机程序被处理器执行时实现如上所述的定位方法。 本发明实施方式的有益效果是:区别于现有技术的情况,本发明实施方式提供一 种定位方法,应用于移动机器人,所述移动机器人包括一雷达传感器,所述方法包括:获取 所述移动机器人在预设地图中的初始位姿,以及雷达传感器所采集的雷达数据,根据所述 初始位姿将所述雷达数据映射到预设地图上,生成映射点云;判断所述映射点云是否包括 第一直线数据段,若判断为是,则根据所述第一直线数据段在预设地图上查找第二直线数 据段,所述第二直线数据段的点集与所述第一直线数据段的点集在预设地图上相对应,根 据所述第一直线数据段和所述第二直线数据段确定角度差,基于所述角度差对所述移动机 器人的初始位姿进行校正,并根据校正后的初始位姿生成第一候选位姿集,根据所述第一 候选位姿集对所述移动机器人进行定位。从而,一方面,通过识别映射点云中的第一直线数 据段,能够得到移动机器人在场景中的角度,从而减小搜索范围,以减少计算量,另一方面, 通过直线拟合,计算第一直线数据段和第二直线数据段的角度差,从而对初始位姿进行校 正,能够提高定位的准确性。 附图说明 一个或多个实施例通过与之对应的附图进行示例性说明,这些示例性说明并不构 成对实施例的限定,附图中具有相同参考数字标号的元件表示为类似的元件,除非有特别 申明,附图中的图不构成比例限制。 图1是本发明实施例提供的一种移动机器人的结构示意图; 图2是本发明实施例提供的一种定位方法的流程示意图; 图3是图2中的步骤S30的细化流程图; 图4是图2中的步骤S40的细化流程图; 6 CN 111590595 A 说 明 书 4/12 页 图5是本发明实施例提供的一种障碍点的示意图; 图6是图2中的步骤S60的细化流程图; 图7是本发明实施例提供的一种定位装置的结构示意图。











