
技术摘要:
本发明提供了一种枪柄系统及冲击波机器人治疗系统,冲击波机器人治疗系统包括主机和安装在主机上的枪柄系统,枪柄系包括:安装至主机的机械臂,机械臂的末端设置有末端工具连接件;枪柄,可拆卸地安装至末端工具连接件,能够在机械臂的驱动下进行运动,枪柄内设置有冲 全部
背景技术:
骨科冲击波治疗作为一种起效快、疗效持久而又没有明显副作用的治疗方法,越 来越被广泛应用在骨性关节炎、软骨损伤、腱鞘炎、骨坏死性疾病(月骨坏死、距骨坏死、舟 状骨坏死)等疾病中。但现有的冲击波治疗系统由一个控制箱或一个台车类设备,一只或几 只枪柄,再配备多个冲击波治疗头组成。在冲击波治疗时,需要医师手持冲击波枪柄,使枪 头端面部位紧密接触患者体表进行治疗。医生在制定冲击波治疗方案时,往往会在多个部 位间来回进行治疗,每次治疗过程一般会持续20到30分钟。医师长时间手持难以保持枪柄 的稳定,治疗过程中冲击波枪柄的持续震动也易造成医师肢体的疲劳损伤。 如果采用被动支撑机械臂把持住冲击波设备的枪柄,在患者患部进行定点治疗, 无法实现冲击波枪柄在人体表面的移动治疗,治疗中每次换到另外一个部位,医生就得重 新牵引机械臂一次,既耗时又耗力。而且,长时间固定位置把持并不能保持枪柄与患者体表 相对位置的稳定,会影响冲击波能量有效稳定的传输到治疗部位,达不到理想的治疗效果。 因此,如何设计出一种不需要手持且能够进行冲击波移动治疗的枪柄系统及冲击 波机器人治疗系统就成为目前亟待解决的问题。
技术实现要素:
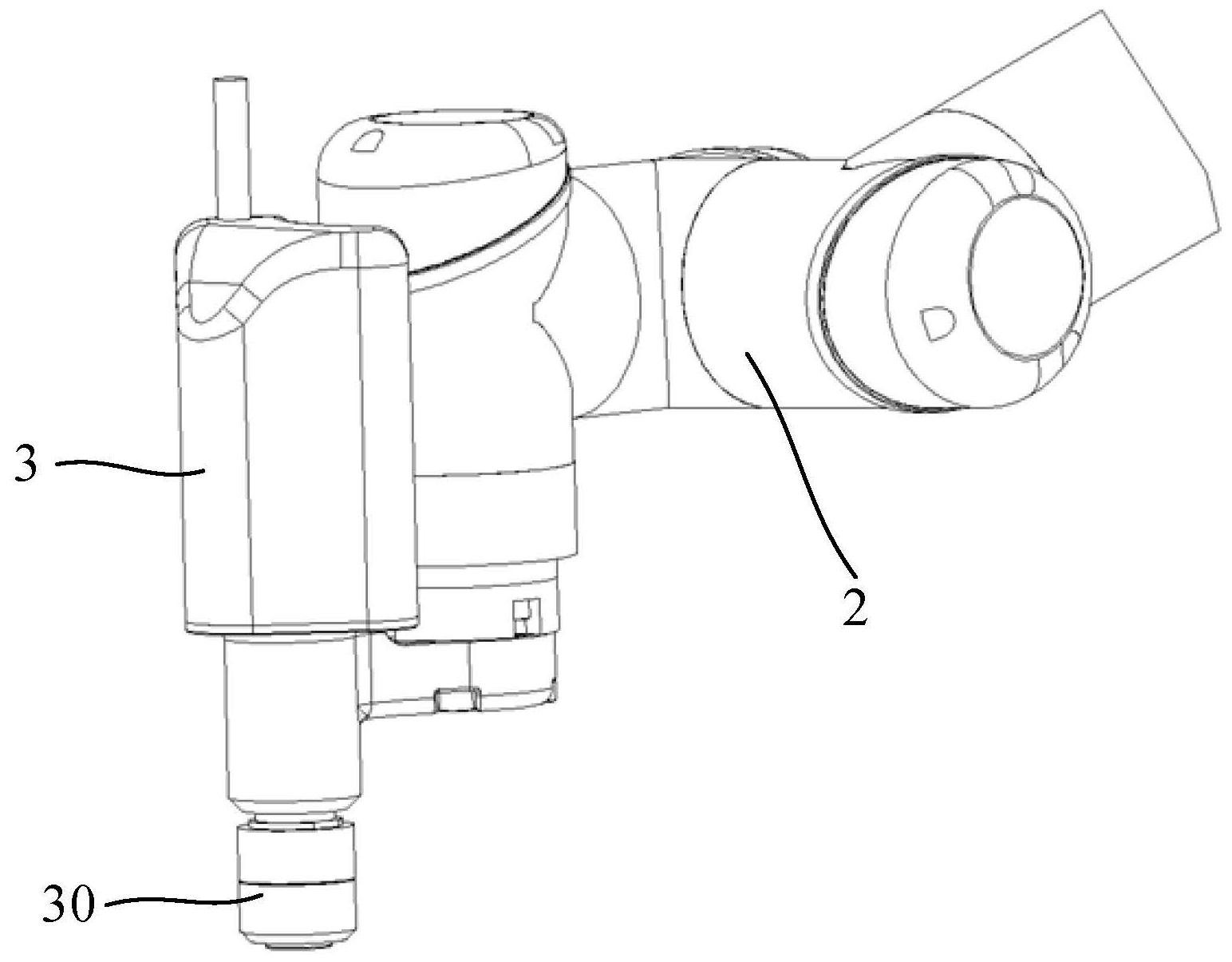
本发明的一个目的在于提供一种枪柄系统。 本发明的另一个目的在于提供一种包括上述枪柄系统的冲击波机器人治疗系统。 根据本发明的第一方面的实施例,提供了一种枪柄系统,用于冲击波机器人治疗 系统,其中,所述冲击波机器人治疗系统包括主机和安装在所述主机上的枪柄系统,所述枪 柄系统能够在所述主机的作用下运动,所述枪柄系统包括: 机械臂,安装至所述主机,所述机械臂的末端设置有末端工具连接件和与所述主 机连接的识别装置,所述末端工具连接件能够适配安装多种末端工具; 枪柄,可拆卸地安装至所述末端工具连接件,能够在所述机械臂的带动下运动,所 述枪柄内设置有冲击波发生装置,所述枪柄的前端设置有用于与患者体表接触的枪头; 其中,所述识别装置能够对与所述末端工具连接件连接的末端工具进行识别,所 述枪柄属于所述末端工具中的一种。 在上述任一方案中,优选地,所述机械臂或主机内设置有能够记录所述机械臂的 运动轨迹的记录装置。 在上述任一方案中,优选地,所述枪柄系统还包括安装在机械臂上或枪柄上的视 觉采集设备,所述视觉采集设备用于采集患者体表的图像信息。 在上述任一方案中,优选地,所述机械臂为7自由度柔性机械臂。 4 CN 111588613 A 说 明 书 2/7 页 在上述任一方案中,优选地,所述枪柄系统还包括耦合组件,所述耦合组件安装在 所述枪头上,且所述枪头在治疗过程中通过所述耦合组件与患者体表接触。 在上述任一方案中,优选地,所述枪柄还包括壳体,所述冲击波发生装置安装在所 述壳体内,且所述枪柄的前端伸出到所述壳体外;消音减震管,安装在所述壳体内,并套设 安装在所述冲击波发生装置外。 进一步地,所述壳体包括基座和安装在所述基座上的外壳,所述外壳和所述基座 之间形成有安装腔,且所述基座上设置有与所述安装腔连通的通孔,其中,所述基座能够与 所述末端工具连接件可拆卸地连接;所述枪柄还包括:动力源控制装置,用于控制冲击波动 力源的连通和断开,安装在所述壳体内,且所述动力源控制装置上设置有容纳腔,所述容纳 腔靠近所述基座的一端开口,所述冲击波发生装置的一端安装在所述容纳腔内,所述冲击 波发生装置的另一端穿过所述容纳腔的开口并由所述通孔伸出到所述基座外;所述消音减 震管位于所述动力源控制装置和所述基座围成的空间内,并套设安装在所述冲击波发生装 置外。 进一步优选地,所述基座和所述外壳之间通过螺钉连接。 进一步优选地,所述枪柄还包括动力源连接通路,所述动力源连接通路用于使所 述冲击波发生装置与冲击波动力源连通。具体地,冲击波发生装置所需的动力源可以为液 电式、压电式、电磁式、气压式等。 进一步优选地,所述基座上设置有突出部,所述突出部突出所述外壳的侧部设置, 所述突出部用于与所述末端工具连接件连接,所述末端工具连接件与所述机械臂的末端固 定连接,且所述机械臂与所述末端工具连接件连接时,所述机械臂末端的部分结构能够与 位于所述突出部上方的部分壳体相抵靠。 根据本发明提供的枪柄系统,用于冲击波机器人治疗系统,而枪柄系统包括安装 在主机上的机械臂和安装在机械臂末端的枪柄,其中,机械臂用于在主机的控制下带动枪 柄运动,且枪柄与机械臂之间通过末端工具连接件可拆卸连接,这样就使得枪柄能够从机 械臂上拆卸下来,更换其他的末端工具安装到机械臂上。识别装置用于对末端工具进行识 别,当枪柄等末端工具安装到机械臂上以后,经过识别匹配能够由机械臂和主机对应安装 的末端工具进行控制而实现其对应的功能。同时,本申请中的枪柄系统能够通过机械臂安 装在主机上,使得枪柄系统能够在主机的作用下实现冲击波智能移动治疗,这样就解放了 操作者的双手,不需要医师长期手持,从而解决了现有手持冲击波枪柄治疗存在的技术问 题,即解决了手持冲击治疗,过程耗时耗力,长时间把持不能保持枪柄的稳定,影响冲击波 能量有效稳定地传输到治疗部位,达不到理想的治疗效果,还有治疗过程中冲击波枪柄的 持续震动造成医师肢体的疲劳损伤等问题,从而使得冲击波的治疗效果更理想,操作过程 更加智能、简便和稳定,且也能够避免因手持枪柄而对医师肢体造成疲劳损伤。同时,该种 结构由于枪柄在机械臂的驱动下能够进行移动治疗,因此可实现多点循环治疗,因而在实 现冲击波自动治疗的同时,实现了冲击波枪柄在人体表面的移动治疗。 本发明第二方面的实施例提供了一种冲击波机器人治疗系统,包括:主机;和第一 方面任一项实施例提供的枪柄系统,所述枪柄系统通过所述机械臂安装至所述主机,且所 述枪柄系统能够在所述主机的控制下运动。 应当理解,公开内容部分中所描述的内容并非旨在限定本发明的实施例的关键或 5 CN 111588613 A 说 明 书 3/7 页 重要特征,亦非用于限制本发明的范围。本发明的其它特征将通过以下的描述变得容易理 解。 附图说明 结合附图并参考以下详细说明,本公开各实施例的上述和其他特征、优点及方面 将变得更加明显。在附图中,相同或相似的附图标记表示相同或相似的元素,其中: 图1示出了本公开的实施例提供的冲击波机器人治疗系统的结构示意图; 图2示出了本公开的实施例提供的冲击波机器人治疗系统的系统结构示意框图; 图3示出了本公开的实施例提供的枪柄系统的结构示意图; 图4示出了枪柄系统的另一结构示意图; 图5为图4中的枪柄系统的分解结构示意图; 图6为一个实施例中的枪柄系统的剖视结构示意图; 图7为一个实施例中的枪柄系统的枪柄的结构示意图; 图8为图6中的枪柄的壳体的结构示意图; 图9为图6中的枪柄的基座的结构示意图; 图10示出了本公开的实施例提供的枪柄系统的机械臂的结构图。 其中,图1至图10中的附图标记与部件名称之间的对应关系为: 1主机,2机械臂,22末端工具连接件,24识别装置,26记录装置,3枪柄,30冲击波发 生装置,31壳体,312外壳,314基座,3140通孔,3142突出部,316安装腔,32动力源控制装置, 33消音减震管,34动力源连接通路,4摄像头,5结构光扫描仪,6耦合组件,7治疗平台,8治疗 辅具,9软件规划设备。











