
技术摘要:
本发明公开了一种单侧传力的机械控制装置及其制造方法,采用“三车一轨一杆”构造,三车为主动车、被动车、随动车,一轨为一固定的轨道,一杆为一受力杆件,被动车、随动车上设有条形孔,车轮上设有齿轮,两车车体嵌套置于轨道上,主动车产生主作用力通过一杆作用于条 全部
背景技术:
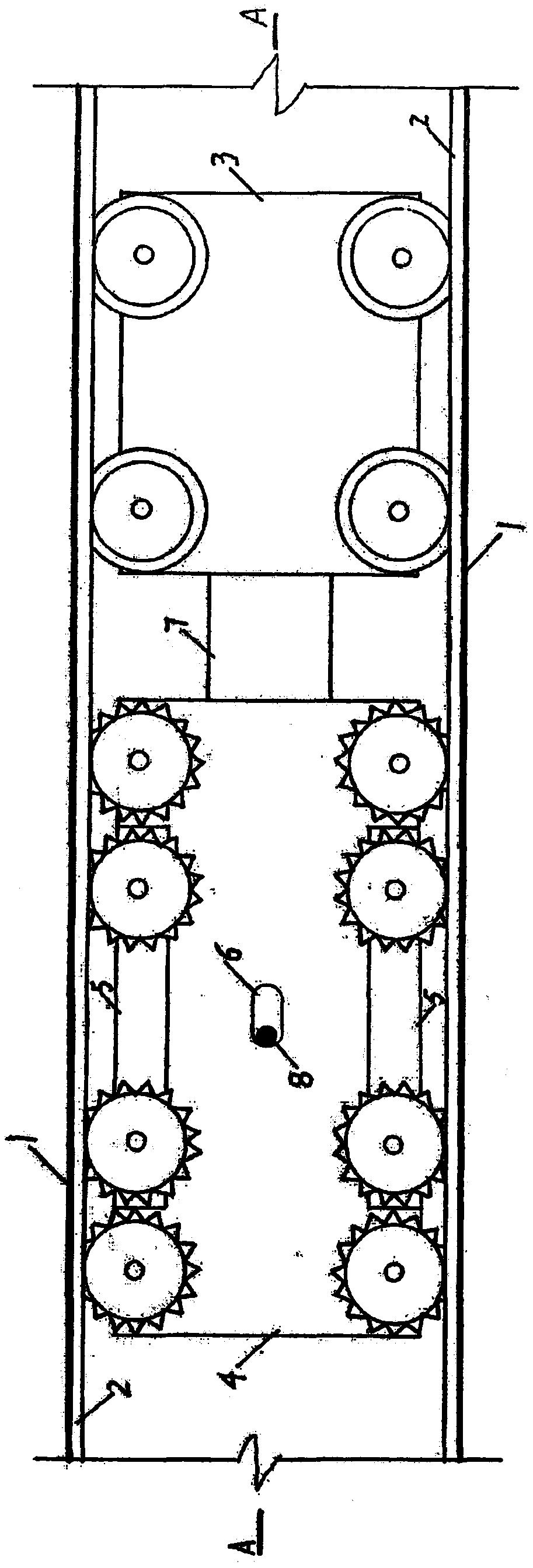
当我们给某一物体一个作用力使其前进、后退时,最理想的效果是该物体能始终 在作用力的方向和节奏下运动,就像一个大人拉一个小孩一样,“我推你能推动,你推我推 不动,我拉你能拉动,你拉我拉不动,我快你快,我慢你慢,我不动你也不能动。”而在实际应 用中,这样的效果是很难完全达到的。比如,我们小区的大门口一般都设有控制车辆出入的 挡杆,不时会出现一些人用手抬起已降落的挡杆,还有在日常生活中,会经常看到人们为赶 时间用手去扒开即将关闭的电梯门甚至地铁列车的自动门,曾有过一则报道,某小区一电 梯出现异常后停留在半空中,电梯内一小孩用手扒开电梯门一脚踏出而跌入了电梯井的深 渊,上述不管是绕一点转动的挡杆,还是水平运动的推拉门,都是由于未能实现运动的全过 程控制,当出现异常外力时而改变了它们预定的运动状态,从而造成安全隐患甚至引发严 重的后果。再比如作垂直上下运动的电梯,人们虽然采用了一系列复杂的措施使其在上升、 下降、停止的运动全过程中达到了自动控制,但实际应用中仍存在有因控制系统失灵而使 电梯出现灾难性自由落体降落的可能。简单、有效地对物体运动实现全过程自动控制,在理 论研究及实际应用中均具有重要的意义。 发明的内容: 为简单有效实现对物体运动的全过程控制,本发明提供一种单侧传力的机械控制 装置及其制造方法,通过利用相随的两个齿轮转向、转速发生变化产生不同的运动效果,以 达到对物体运动全过程自动控制的目的。 为实现以上目的,本发明提供以下技术方案:一种单侧传力的机械控制装置及其 制造方法,采用“三车一轨一杆”构造,一轨为一固定的轨道,将其设置在固定的轨体上;三 车分别为主动车、被动车、随动车,三车均由车体和车轮组成,被动车、随动车的车轮上设有 齿轮,齿轮与车轮绕同一中心转动,齿轮的直径要大于车轮的直径,三车置入轨体后车轮可 沿着轨体上固定的轨道转动以带动三车的车体运动,被动车、随动车的车体上设有大小相 同的条形孔,条形孔的长度方向与车体运行的方向相同,被动车、随动车两车的车体可嵌套 置入轨体,嵌套后两车的车体不相接触,两车的条形孔对应,两车的车轮相随且被动车沿着 轨道前进或后退时至少有一个车轮能与随动车的车轮相遇,相遇的两个车轮上的齿轮可发 生咬合,被动车与被控制物体相连,主动车上设有一伸出的力臂,力臂的端部设有安装孔, 主动车置入轨体,力臂伸入被动车、随动车嵌套的车体,主动车的力臂与被动车、随动车车 体不相接触,主动车力臂端部的安装孔与被动车、随动车车体上的条形孔对应;一杆为一断 面为圆形的受力杆件,其直径要小于条形孔的宽度,一杆穿过主动车力臂上的安装孔及被 动车和随动车的条形孔,将置入轨体的三车相连。 上述的一种单侧传力的机械控制装置及其制造方法,所述的固定的轨道,其轨面 3 CN 111594592 A 说 明 书 2/3 页 可为平直轨面或者齿形轨面,对应的三车的车轮设成光圆或者齿形车轮,齿形车轮与齿形 轨面的齿距相同,光圆的车轮在平直的轨面上转动带动三车运动,齿形的车轮在齿形轨面 上转动带动三车运动 上述的一种单侧传力的机械控制装置及其制造方法,也可采用“两车一轨一杆”构 造,即将其中的主动车去除,一杆穿过被动车,随动车的条形孔使嵌套的两车相连。 上述的一种单侧传力的机械控制装置及其制造方法,与被动车相连的被控制物 体,可为一种受力后可整体运动的物体,也可为一种受力后可发生形变的弹性体。 同一直线运行轨迹上转动前行的两个齿轮,当其完全同步运动时,即运动方向、运 动速度完全一致时,其互不影响,正常运动;当其运动不同步时,如运动方向相同,运动速度 不同,后面运行速度较快的齿轮会撵上前面运行速度较慢的齿轮,两者咬合产生制动效果 使运动停止;当两个齿轮面对面运动同样会发生咬合产生制动;而当两个咬合的齿轮背向 运动时,其会分离后各自运动。以上技术方案正是利用此原理,装置内的主动车上产生的作 用力通过一杆作用于被动车、随动车上使它们同步运动,被动车与被控制物体相连使其相 应地运动,随动车始终跟随主动车的作用力运动,当被控制物体上出现的外力足以使被动 车运动状态发生改变时,此时被动车与随动车出现运动不同步。被动车车轮上的齿轮就会 与随动车车轮上的齿轮咬合产生制动,从而使被动车及与之相连的被控制物体只能在主动 车的作用力下进行运动,进而实现了对物体运动的全过程控制。 被控制物体分两种,一种为受力后可整体运动的物体,另一种为受力后可发生形 变的弹性体,这样物体的运动过程就有两种,一种为物体整体的运动过程,另一种为弹性体 本身的形变过程。当被控制物体为弹性体时,该装置整体可看成一种“弹塑体”,该弹塑体受 作用力时发生弹性形变,作用力撤除后不能恢复,又显示为塑性特征,当作用力产生的一方 为高速运动的物体,该弹塑体可实现将其巨大的动能转化为弹性势能并储存的功能。 本发明的有益效果是,本发明是一款具有自动控制功能的机械装置,它采用同一 运行轨道上的紧密相随的齿轮构造,实现了物体运动全过程自动控制的目的,它是一种全 机械自动控制装置,结构简单,过程控制有效可靠,它作为一种基础性控制类装置,具有普 遍的应用价值。 附图说明 下面结合附图和实施例对本发明进一步进行说明。 图1为单侧传力装置构造示意图 图2为沿着图1中A-A线剖面示意图 图中1、固定的轨体 2、固定的轨道 3、主动车 4、被动车 5、随动车 6、条形孔 7、 力臂 8、一杆
技术实现要素:
【实施例1】一种单侧传力的机械控制装置,采用“三车一轨一杆”构造,一轨为一固 定的轨道2,其设置在固定的轨体1上,图示轨道的轨面为平直轨面;三车分别为主动车3、被 动车4、随动车5,三车均由车体和车轮组成,图示三车的车轮为光圆车轮,被动车4、随动车5 的车轮上设有齿轮,齿轮与车轮绕同一中心转动,齿轮的直径大于车轮的直径,三车置入固 4 CN 111594592 A 说 明 书 3/3 页 定的轨体1后其车轮可沿着固定的轨道2转动以带动车体前进,被动车4、随动车5的车体上 设有大小相同的条形孔6,条形孔6的长度方向与车体运行方向相同,被动车4、随动车5两车 的车体可嵌套置入固定的轨体1,嵌套后两车的车体不相接触,两车的条形孔对应,两车的 车轮相随且被动车的车轮沿轨道前进或后退时至少有一个车轮能与随动车的车轮相遇,相 遇的两个车轮上的齿轮可发生咬合,被动车4上连接被控制物体。被控制物体可为一种受力 后可整体运动的物体,也可为一种受力后产生形变的弹性体,主动车3上设有一伸出的力臂 7,力臂7的端部设有安装孔,主动车3置入固定的轨体1,力臂7伸入被动车4、随动车5嵌套的 车体,力臂与被动车、随动车的车体不相接触,力臂上的安装孔与被动车、随动车的条形孔 对应;一杆8为一断面为圆形的受力杆件,其直径小于条形孔的宽度,一杆8安装于力臂上的 安装孔并穿过条形孔6,将置入轨体且又在同一轨道上的主动车3、被动车4、随动车5相连。 【实施例2】将固定的轨道2平直的轨面改为齿形轨面,对应的主动车3、被动车4、随 动车5的光圆车轮改为齿形车轮,齿形车轮与齿形轨面的齿距相同,齿形车轮可在齿形轨面 上转动以带动三车车体运动。 【实施例3】将上述的主动车3去除,整体构造变为“两车一轨一杆”,一杆8直接穿过 条形孔6,将置入固定的轨体1且车体嵌套的被动车4、随动车5相连。 本装置对物体整体的运动全过程自动控制的动作过程为:主作用力通过主动车3 或者直接作用于一杆8上,一杆8始终处于条形孔6的一端,被动车4、随动车5同步运动,推动 与被动车4相连的物体产生整体运动,当被控制物体上产生异常外力时,当异常外力足以改 变被动车运动状态时,此时被动车4就会与始终在主作用力方向和节奏下运动的随动车5产 生运动不同步,两车上的齿轮咬合产生制动效果,阻止了被控制物体受异常外力影响而发 生运动状态的改变。 本装置对弹性体形变的全过程自动控制的动作过程(被控的弹性体以压缩弹簧为 例):主作用力通过主动车3或直接作用于一杆8上,一杆8始终处于条形孔的一端,被动车4、 随动车5同步运动,推动与被动车4相连的压缩弹簧产生压缩形变,当主作用力撤除后,随动 车5停止运动,而压缩弹簧产生的弹力会推动被动车4向与主作用力方向相反的方向运动, 此时被动车4与随动车5产生运动不同步,两车的齿轮咬合产生制动效果,阻止了压缩弹簧 的形变恢复。 5 CN 111594592 A 说 明 书 附 图 1/2 页 图1 6 CN 111594592 A 说 明 书 附 图 2/2 页 图2 7











