
技术摘要:
本申请实施例中提供了一种无人车动态交互场景的判定方法、系统、判定终端及存储介质。采用本申请实施例中的无人车动态交互场景的判定方法,首先采集无人车行驶数据以及背景实体数据;然后,根据无人车行驶数据以及背景实体数据计算多项判定指标数据;再根据多项判定指 全部
背景技术:
无人驾驶技术作为学术界和产业界重要的研究方向,对于汽车行业乃至交通运输 业均有深远的影响。无人驾驶汽车能够解放人类的双手,降低交通事故发生的概率,保障人 们的安全。随着人工智能、传感检测等核心技术的不断发展,无人驾驶技术必将更加智能 化,并加快实现产业化。 驾驶场景是对无人车行驶过程中遇到的行驶环境的类型概括和表达,基于场景对 无人车行驶能力评估是发现无人车平台漏洞的一个必要手段。因此,准确完备的场景判定, 是对无人车进行能力评估的一个重要前提条件。 在无人驾驶的背景下,中国专利号为201811496440.5的专利“无人驾驶汽车测试 方法、装置、电子设备及介质”给出了基于场景对无人车在封闭测试场内行驶过程进行量化 描述和指标统计的方法体系。其基于封闭测试场内典型化的道路类型,定义对应的道路测 试场景,并在电子地图上进行标注;将无人车的行驶过程定义为对场景的途经过程。通过采 集无人车在行驶过程中的GPS定位数据和CAN总线数据,与经过良好标注的测试场电子地图 场景、背景实体进行时空关联分析,最终完成对无人车行驶过程的量化统计和评估。 在无人车测试过程中,动态交互场景的判定是一个难题,场景的时空发生位置以 及交互个体的行为耦合等,都会对场景的判定产生影响。现有技术虽然给出了无人车行驶 过程进行量化描述和指标统计的通用方法体系,但更适用于静态场景的判定,对动态交互 场景未给出具体判定方法,不能有效地进行支持和应用。因此,目前亟待一种无人驾驶汽车 测试方法解决无人车测试过程中动态交互场景,例如避障、跟车、会车、超车等场景下的判 定问题。在交互场景准确判定的基础上,可以对无人车发生交互行为的时间和空间范围进 行界定,并进一步评估其在交互过程中的能力表现,有助于发现无人车在交互场景中存在 的问题。
技术实现要素:
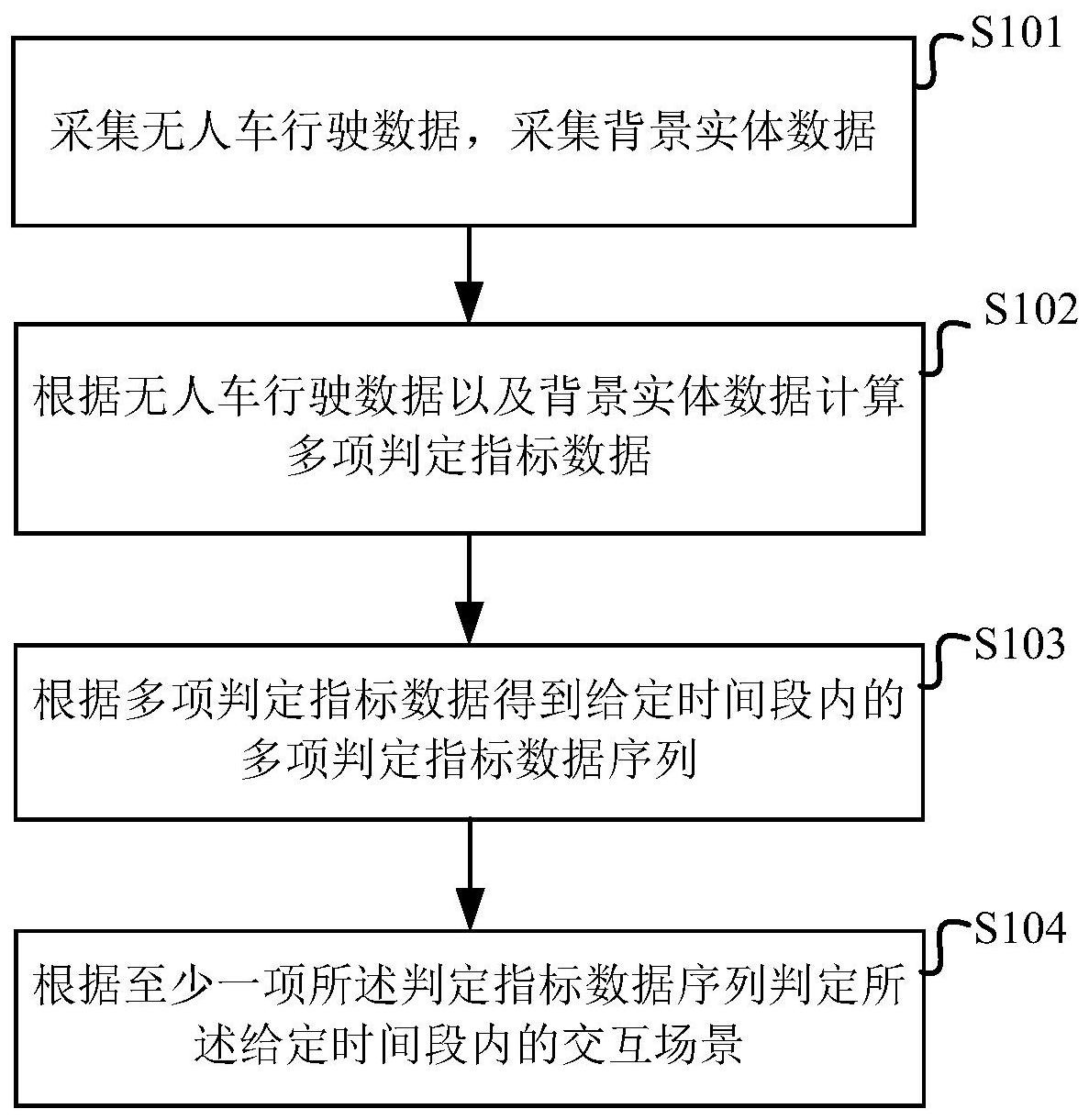
本发明提出了一种无人车动态交互场景的判定方法、系统、判定终端及存储介质, 旨在解决无人车测试过程中动态交互场景准确判定的问题。 根据本申请实施例的第一个方面,提供了一种无人车动态交互场景的判定方法, 包括以下步骤: 采集无人车行驶数据,采集背景实体数据; 根据无人车行驶数据以及背景实体数据计算多项判定指标数据; 根据多项判定指标数据得到给定时间段内的多项判定指标数据序列; 根据至少一项判定指标数据序列判定所述给定时间段内的交互场景。 4 CN 111582018 A 说 明 书 2/10 页 可选地,无人车行驶数据包括无人车GPS定位数据和CAN总线数据;背景实体数据 包括背景动态实体的位置数据以及背景静态实体的属性数据。 可选地,根据至少一项判定指标数据序列判定所述给定时间段内的交互场景类 型,具体包括: 设定交互场景的判定条件集,判定条件集包括至少一项判定指标数据序列; 设定判定条件集内每一项判定指标数据序列的判定条件; 根据判定条件集判定给定时间段内交互场景类型或者交互量化表现。 可选地,判定指标具体包括:背景实体运动方向角与无人车车头方向角的夹角、无 人车与背景实体向量角与无人车自身车头方向的夹角、背景实体运动速度、无人车速度、背 景实体加速度、无人车加速度、无人车与背景实体的向量距离以及无人车与背景实体之间 的路径距离。 可选地,根据至少一项判定指标数据序列判定给定时间段内的交互场景,具体包 括: 根据无人车与背景实体之间的路径距离的数据序列得到基于给定时间段内的车 头路径距离曲线; 遍历车头路径距离曲线; 若车头路径距离曲线存在相变点使无人车与背景实体之间的路径距离为零,则判 定无人车在给定时间段内的交互场景包括超车、会车或者避障; 若车头路径距离曲线不存在相变点使无人车与背景实体之间的路径距离为零,且 车头路径距离保持在设定范围内,则判定无人车在给定时间段内的交互场景包括跟车。 可选地,若车头路径距离曲线存在相变点使无人车与背景实体之间的路径距离为 零,则判定无人车在给定时间段内的交互场景包括超车、会车或者避障,具体包括: 若车头路径距离曲线存在相变点使无人车与背景实体之间的路径距离为零,且背 景实体运动方向角与无人车车头方向角的夹角在0度数值上下浮动,且背景实体为背景车 辆,则判定无人车在给定时间段内的交互场景为超车; 若车头路径距离曲线存在相变点使无人车与背景实体之间的路径距离为零,且背 景实体运动方向角与无人车车头方向角的夹角在180度数值上下浮动,且背景实体为背景 车辆,则判定无人车在给定时间段内的交互场景为会车; 若车头路径距离曲线存在相变点使无人车与背景实体之间的路径距离为零,且背 景实体静止,则判定无人车在给定时间段内的交互场景为避障。 可选地,若车头路径距离曲线不存在相变点使无人车与背景实体之间的路径距离 为零,且车头路径距离保持在设定范围内,则判定无人车在给定时间段内的交互场景包括 跟车,具体包括: 若车头路径距离曲线不存在相变点使无人车与背景实体之间的路径距离为零,车 头距离保持在设定范围内,且背景实体运动方向角与无人车车头方向角的夹角在一固定数 值上下浮动,且背景实体为背景车辆,则判定无人车在给定时间段内的交互场景为跟车。 根据本申请实施例的第二个方面,提供了一种无人车动态交互场景的判定系统, 具体包括: 数据采集模块,用于采集无人车行驶数据和背景实体数据; 5 CN 111582018 A 说 明 书 3/10 页 判定指标计算模块,用于根据无人车行驶数据以及背景实体数据计算多项判定指 标数据; 判定指标序列生成模块,用于根据多项判定指标数据得到给定时间段内的多项判 定指标数据序列; 交互场景判定模块,用于根据至少一项判定指标数据序列判定所述给定时间段内 的交互场景。 根据本申请实施例的第三个方面,提供了一种判定终端,包括:处理器和存储器; 其中,存储器存储有计算机程序,计算机程序适于由处理器加载并执行无人车车道级场景 的判定方法。 根据本申请实施例的第四个方面,提供了一种计算机可读存储介质,其上存储有 计算机程序;计算机程序被处理器执行以实现无人车动态交互场景的判定方法。 采用本申请实施例中的无人车动态交互场景的判定方法、系统、判定终端及存储 介质,首先采集无人车行驶数据以及背景实体数据;然后,根据无人车行驶数据以及背景实 体数据计算多项判定指标数据;再根据多项判定指标数据得到一段时间内的多项判定指标 数据序列;最后,根据至少一项判定指标数据序列判定在给定时间段内的交互场景,从而解 决了无人车测试过程中动态交互场景准确判定的问题。 附图说明 此处所说明的附图用来提供对本申请的进一步理解,构成本申请的一部分,本申 请的示意性实施例及其说明用于解释本申请,并不构成对本申请的不当限定。在附图中: 图1中示出了根据本申请实施例的一种无人车动态交互场景的判定方法的步骤流 程图; 图2中示出了根据本申请实施例中背景车辆和无人车行驶在测试路网上示意图及 夹角α(t)和夹角γ(t)的示意图; 图3中示出了根据本申请实施例中背景车与无人车在测试路网的超车示意图以及 无人车与背景车之间的路径距离τ(t)的曲线变化图; 图4示出了根据本申请实施例的一种无人车动态交互场景的判定系统的结构示意 图; 图5示出了根据本申请实施例的一种判定终端的结构示意图。











