
技术摘要:
本发明提供了一种基于深度学习的CT影像椎弓根植钉通道规划方法和系统,收集脊椎的CT影像数据,标注CT影像数据中椎弓根植钉通道的关键点位置,将CT影像数据拆分成训练数据集、验证数据集、测试数据集;对CT影像数据中三维的层间距进行修订,对修订后数据进行归一化,对 全部
背景技术:
目前存在的一些椎弓根植钉规划方法,大都在X射线成像或者CT影像的横切面等 二维成像上采用一些形态学处理,阈值提取等简单的图像技术实现的算法,存在精度差,泛 化能力差,对CT成像的成像规格和质量要求很高等问题,并不能给医生做植钉规划提供有 效的帮助,而且也不是真正意义上的自动化流程,无法与植钉手术机器人达成很好的配合。 如现有技术中(2018年05月的期刊“集成技术”第7卷第43页公开了“基于机器学习 的机器人辅助椎弓根植钉规划”)的这种基于二维切面上进行图像形态学处理寻找中心线 等方法,其虽然能在一些正常的脊椎上实现粗糙的自动规划效果,但是根本无法应对CT影 像中脊椎侧弯,倾斜等临床中常见的现象,导致算法精度极差,甚至失效。
技术实现要素:
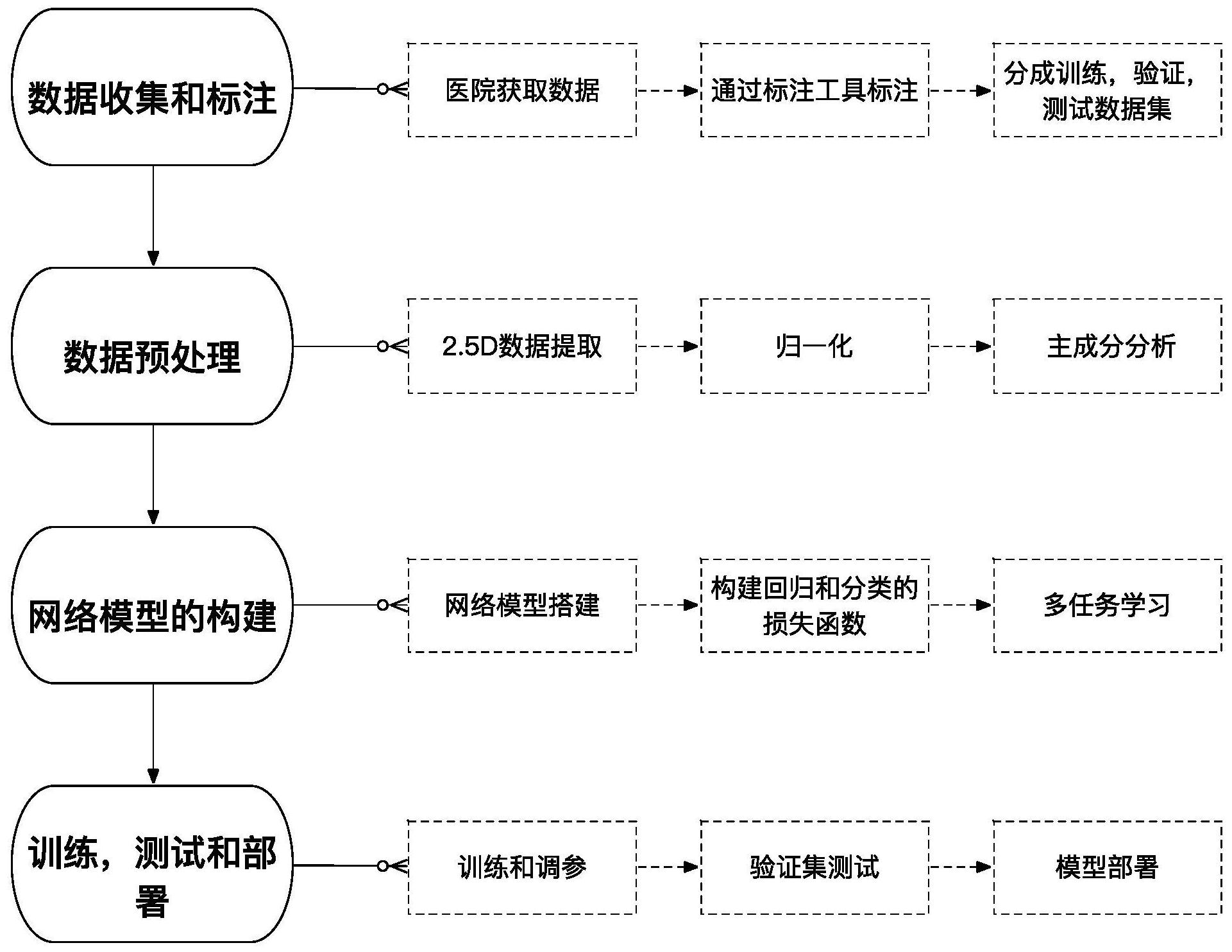
针对现有技术中的缺陷,本发明的目的是提供一种基于深度学习的CT影像椎弓根 植钉通道规划方法和系统。 根据本发明提供的一种基于深度学习的CT影像椎弓根植钉通道规划方法,包括: 影像收集步骤:收集脊椎的CT影像数据,标注CT影像数据中椎弓根植钉通道的关 键点位置,将CT影像数据拆分成训练数据集、验证数据集、测试数据集; 预处理步骤:对CT影像数据中三维的层间距进行修订,对修订后数据进行归一化, 对关键点位置建立主成分分析; 网络构建步骤:构建关键点位置识别网络模型,识别网络模型后接回归任务和分 类任务,并通过多任务学习分别计算初始化点到目标点的距离和方向; 部署步骤:采用Tensorflow搭建识别网络模型,利用训练数据集和测试数据集进 行训练调参,利用验证数据集进行测试,将通过测试的识别网络模型部署在以Docker为容 器的微服务云端。 优选地,所述预处理步骤包括: 重采样步骤:将对CT影像数据中三维的层间距改成1mm,并进行归一化处理; 修订步骤:对CT影像数据修订为以围绕关键点位置的冠状面、矢状面和横断面构 成的2.5D数据结构; 降维步骤:以X=(x1,y1,z1,…,xnl,y Tnl,znl) 表示所有nl个三维关键点位置,对于一 组训练数据X,对其使用主成分分析模型把X变换到低维度空间,其中原始空间和降维后的 低维度空间之间的变换表示为 5 CN 111598948 A 说 明 书 2/5 页 其中 是整个训练数据集的均值,b是一个nb个元素的向量,其中nb<3nl,矩阵W的 列为nb个特征向量,矩阵W表示神经网络中的权重,nb表示数据三位关键点的总数,下标b表 示一个临时变量。 优选地,所述网络构建步骤包括: 模型搭建步骤:构建关键点位置的7层深度卷积神经网络作为识别网络模型,每一 层后接ReLU激活函数和Max-Pooling层,其中网络层被任务分支所共享,每个任务分支各由 3层全连接层构成负责学习特定的任务; 构建函数步骤:对于一个CT影像数据V和它的标注关键点xGT,一个训练的采样表示 为(I(V,x,s) ,dGT ,PGT) ,其中x是一个从CT影像V中随机采样的位置点,I(V,x,s)是对应的 2.5D立体数据结构,则移动到标注关键点的位移向量表示为dGT=xGT-x,深度卷积神经网络 的损失函数L表示为: 其中, 为回归任务的欧式距离损失, 为分类任务的交叉熵损失,α是用来调节两者比重的参数,nbatch 表示一个batch中训练样本的个数,dn和 分别表示对于第n个样本网络输出的对于回 归任务和分类任务的预测,n0表示CT数据中关键点的数量, 表示第n个样本对于回归任 务的真实值; 迭代步骤:对于一个CT影像数据,初始化多个随机的采样点,对于每一个采样点提 取围绕这个采样点的2.5D立体数据结构输入到深度卷积网络中,根据其输出的结果和特定 的更新规则移动采样点,重新输入深度卷积网络中预测,依此迭代直到没有显著地改变后 停止,对多个采样点最后的位置求平均值作为最后的预测。 优选地,所述训练数据集、验证数据集和测试数据集的数据比例为8:1:1。 优选地,所述任务分支包括回归任务分支和分类任务分支,所述回归任务分支估 算当前初始化点到目标关键点的距离,所述分类任务分支估算当前初始化点到目标关键点 的方向。 根据本发明提供的一种基于深度学习的CT影像椎弓根植钉通道规划系统,包括: 影像收集模块:收集脊椎的CT影像数据,标注CT影像数据中椎弓根植钉通道的关 键点位置,将CT影像数据拆分成训练数据集、验证数据集、测试数据集; 预处理模块:对CT影像数据中三维的层间距进行修订,对修订后数据进行归一化, 对关键点位置建立主成分分析; 网络构建模块:构建关键点位置识别网络模型,识别网络模型后接回归任务和分 类任务,并通过多任务学习分别计算初始化点到目标点的距离和方向; 部署模块:采用Tensorflow搭建识别网络模型,利用训练数据集和测试数据集进 行训练调参,利用验证数据集进行测试,将通过测试的识别网络模型部署在以Docker为容 6 CN 111598948 A 说 明 书 3/5 页 器的微服务云端。 与现有技术相比,本发明具有如下的有益效果: 1、通过采用构建深度神经网络自动在CT影像上定位植钉通道关键点的方法,从而 实现了椎弓根植钉通道的自动规划。 2、通过采用主成分分析对关键点之间的解剖学关系建模,从而实现了同时对多个 植钉通道关键点定位。 3、通过采用多个随机采样点求平均和多次迭代逼近的方法,从而提高了深度卷积 神经网络模型整体的精度和泛化能力。 附图说明 通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、 目的和优点将会变得更明显: 图1为本发明的处理流程示意图。











