
技术摘要:
本公开提供了一种挖掘路网数据的方法、装置及电子设备,该方法包括:获取在第一路网中代表第一道路的道路点序列;对于所述道路点序列中的每一第一道路点,创建对应第一道路点在第二路网中的映射点集合,其中,所述映射点集合中的至少一个映射点包括一个缺失点;根据创 全部
背景技术:
随着移动互联网技术的快速发展,基于位置的服务(Location Based Services, LBS)给人们在生活服务和出行等方面带来了极大的便利性,其中,路网数据作为地理信息 数据中非常重要的一环,为人们提供出行导航,路径规划等服务。 路网数据存在数据量大,更新迭代速度较快等特点,而路网数据的准确性和时效 性会显著影响基于位置的服务的质量,因此需要有效的手段进行路网数据的更新,包括路 网数据的新增、删除、修正等,以保证路网数据的准确性和时效性。 路网数据可以根据卫星影像,轨迹数据,实地采集数据以及异源路网等数据源进 行更新,其中,通过作为异源路网的第一路网挖掘平台使用的第二路网的缺失道路,是道路 数据更新的一个重要、有效的手段。现有技术中,在通过第一路网挖掘第二路网的缺失道路 时,不仅需要第一路网提供较为完备的道路属性信息,而且需要利用通过监督学习得到的 模型进行道路匹配,进而导致对于缺失道路的挖掘存在流程复杂、且成本高的问题,因此, 有必要提供一种通过第一路网挖掘第二路网的缺失道路的新的技术方案,以简化挖掘流 程,并降低挖掘成本。
技术实现要素:
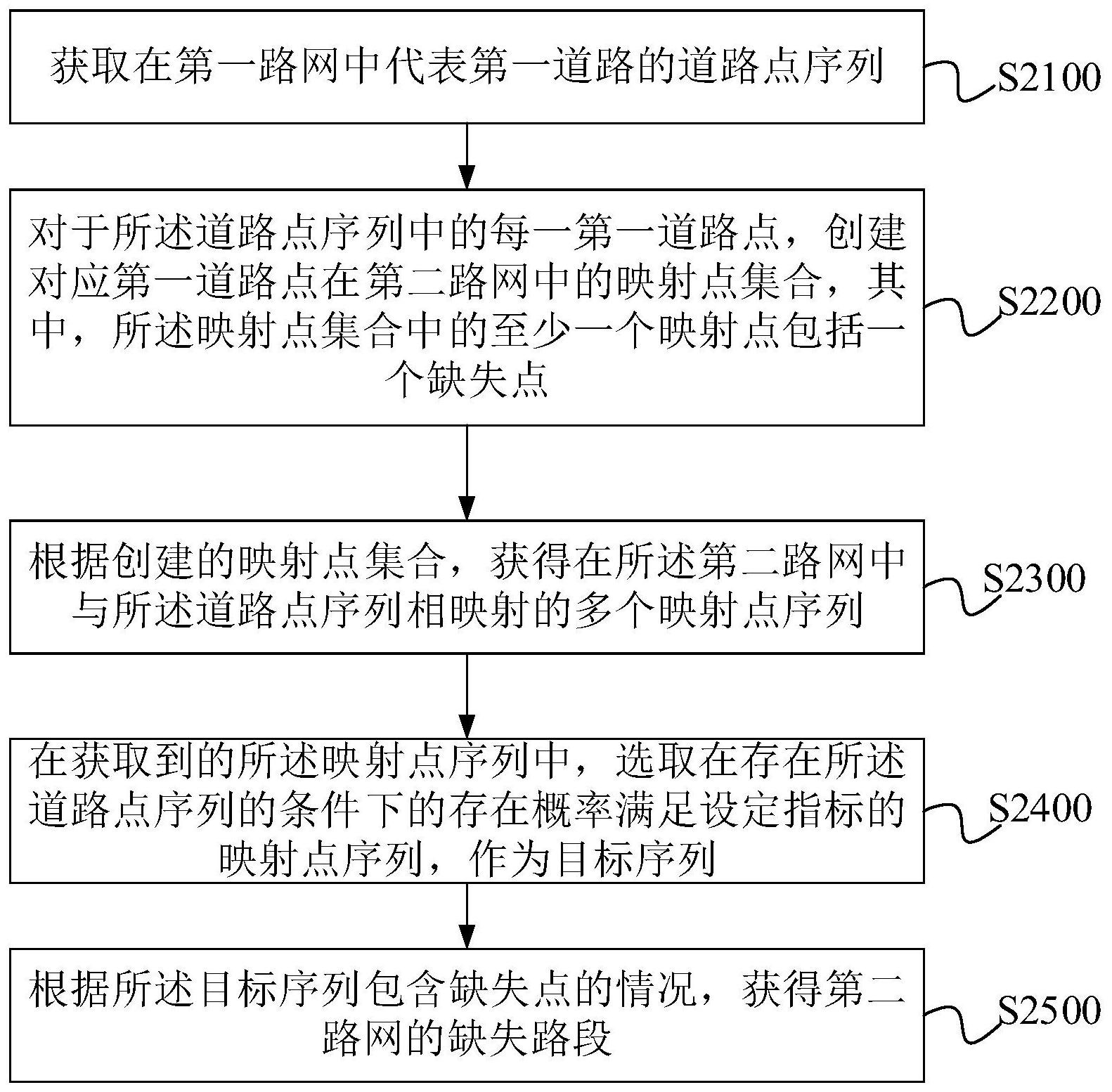
通过以下参照附图对本发明的示例性实施例的详细描述,本发明的其它特征及其 优点将会变得清楚。 根据本公开的第一方面,提供了一种挖掘路网数据的方法,其包括: 获取在第一路网中代表第一道路的道路点序列; 对于所述道路点序列中的每一第一道路点,创建对应第一道路点在第二路网中的 映射点集合,其中,所述映射点集合中的至少一个映射点包括一个缺失点,所述缺失点表示 所述第二路网不具有与所述对应第一道路点相匹配的第二道路点; 根据创建的映射点集合,获得在所述第二路网中与所述道路点序列相映射的多个 映射点序列,其中,任意所述映射点序列包括从每一所述映射点集合中各抽取的一个映射 点; 在获取到的所述映射点序列中,选取在存在所述道路点序列的条件下的存在概率 满足设定指标的映射点序列,作为目标序列; 根据所述目标序列包含缺失点的情况,获得第二路网的缺失路段。 可选地,所述根据所述目标序列包含缺失点的情况,获得第二路网的缺失路段包 括: 在所述目标序列包含连续缺失点的情况下,获取与所述连续缺失点相映射的位于 5 CN 111597282 A 说 明 书 2/17 页 所述道路点序列中的连续第一道路点; 将所述连续第一道路点所表示的路段,作为所述第二路网的缺失路段。 可选地,所述方法还包括: 获取在第一路网中的一条道路; 获取在所述第一路网中与所述一条道路具有交点的其他道路; 将所述一条道路与所述其他道路相拼接,得到所述第一道路。 可选地,所述创建对应第一道路点在第二路网中的映射点集合包括: 在所述第二路网中,查找与所述第一道路满足设定的邻近条件的至少一条第二道 路; 对于每一所述第二道路,获取对应第二道路上的距离所述对应第一道路点最近的 第二道路点; 创建所述映射点集合包括一个缺失点和获取到的所述第二道路点。 可选地,所述创建对应第一道路点在第二路网中的映射点集合,还包括: 在获取到的所述第二道路点中,滤除与所述对应第一道路点间的距离大于设定的 距离阈值的第二道路点。 可选地,所述选取在存在所述道路点序列的条件下的存在概率满足设定指标的映 射点序列,包括: 将所述道路点序列作为隐马尔可夫模型中的观测序列,及将所述映射点序列作为 所述隐马尔可夫模型中的状态序列,获得所述隐马尔可夫模型的模型参数,其中,所述模型 参数包括转移概率矩阵、发射概率矩阵和初始概率矩阵; 基于所述模型参数,选取在存在所述道路点序列的条件下的存在概率满足设定指 标的映射点序列。 可选地,所述转移概率矩阵包括每一映射点序列中每一映射点的存在概率,所述 获得所述隐马尔可夫模型的模型参数包括获得任意映射点序列中任意映射点的存在概率 的步骤,包括: 检测所述任意映射点和所述任意映射点在所述任意映射点序列中的前一映射点 是否均不属于缺失点; 在均不属于缺失点的情况下,连接所述任意映射点与所述前一映射点,得到映射 线段; 在所述道路点序列中,连接与所述任意映射点相映射的第一道路点及与所述前一 映射点相映射的第一道路点,得到道路线段; 计算所述映射线段与所述道路线段间的相似度,作为所述任意映射点的存在概 率。 可选地,所述计算所述映射线段与所述道路线段间的相似度,包括: 获取预设的各相似度指标; 将所述映射线段与所述道路线段作为一匹配对,分别计算所述匹配对对于所述各 相似度指标中每一指标的指标值; 根据该指标值,获得所述映射线段与所述道路线段间的相似度; 其中,所述各相似度指标包括以下至少一项指标: 6 CN 111597282 A 说 明 书 3/17 页 第一指标,反映在线段于对应路网上是否具有对应路段方面的相似性; 第二指标,反映在线段长度方面的相似性; 第三指标,反映在线段角度方面的相似性。 可选地,所述获得任意映射点序列中任意映射点的存在概率的步骤,还包括: 在所述任意映射点和/或所述前一映射点为缺失点的情况下,根据所述任意映射 点与所述前一映射点的配对类型,设置所述任意映射点的存在概率为与所述配对类型相对 应的设定值。 可选地,所述发射概率矩阵包括位置点序列中每一第一位置点分别对于每一映射 点序列的存在概率,所述获得所述隐马尔可夫模型的模型参数包括获得任意第一位置点对 于任意映射点序列的存在概率的步骤,包括: 在所述任意映射点序列中,获取与所述任意道路点相映射的映射点,作为目标映 射点; 在所述目标映射点不是缺失点的情况下,检测所述任意道路点与所述目标映射点 是否满足设定条件中的任意条件,并在满足任意条件的情况下,确定所述任意道路点对于 所述任意映射点序列的存在概率为0; 在不满足所述设定条件的情况下,根据所述任意道路点与所述目标映射点间的距 离,获得所述任意道路点对于所述任意映射点序列的存在概率; 其中,所述设定条件包括第一条件和第二条件中的至少一项: 所述第一条件包括:所述任意道路点与所述目标映射点所属道路的道路方向不一 致; 所述第二条件包括:所述任意道路点与所述目标映射点所属道路的道路类型不一 致。 根据本公开的第二方面,还提供了一种挖掘路网数据的装置,其包括: 数据获取模块,用于获取在第一路网中代表第一道路的道路点序列; 路网映射模块,用于对于所述道路点序列中的每一第一道路点,创建对应第一道 路点在第二路网中的映射点集合,其中,所述映射点集合中的至少一个映射点包括一个缺 失点,所述缺失点表示所述第二路网不具有与所述对应第一道路点相匹配的第二道路点; 路径分配模块,用于根据创建的映射点集合,获得在所述第二路网中与所述道路 点序列相映射的多个映射点序列,其中,任意所述映射点序列包括从每一所述映射点集合 中各抽取的一个映射点; 路径优化模块,用于在获取到的所述映射点序列中,选取在存在所述道路点序列 的条件下的存在概率满足设定指标的映射点序列,作为目标序列;以及, 缺失定位模块,用于根据所述目标序列包含缺失点的情况,获得第二路网的缺失 路段。 根据本公开的第三方面,还提供了一种电子设备,包括根据本公开的第二方面所 述的装置;或者,包括: 存储器,用于存储可执行的指令; 处理器,用于根据所述指令的控制运行所述电子设备执行如本公开的第一方面所 述方法。 7 CN 111597282 A 说 明 书 4/17 页 根据本公开实施例的有益效果在于,本实施例的方法在根据第一路网中的第一道 路挖掘第二路网中的缺失道路时,获得与第一道路的各第一道路点一一对应映射的映射点 集合,进而可以通过这些映射点集合获得在第二路网中与第一道路相映射的多个映射点序 列,以筛选出存在概率满足设定指标的映射点序列作为目标序列,并根据目标序列包含的 缺失点的情况,挖掘出第二路网中的缺失路段。该方法可以减少处理步骤,进而能够减少误 差引入来源的优点,而且,该方法不依赖于监督学习的模型进行缺失道路的挖掘,这可以有 效降低挖掘路网数据的成本,并提高挖掘效率。 附图说明 被结合在说明书中并构成说明书的一部分的附图示出了本发明的实施例,并且连 同其说明一起用于解释本发明的原理。 图1显示了可用于实现本公开实施例的挖掘缺失道路的方法的系统结构示意图; 图2是根据本公开实施例的挖掘缺失道路的方法的流程示意图; 图3是根据本公开实施例的在第二路网中筛选第二道路的实施方式示意图; 图4是根据本公开实施例的生成多个映射点序列的实施方式示意图; 图5a、图5b是根据一个例子的挖掘结果示意图; 图6是根据本公开实施例的挖掘缺失道路的装置的原理框图; 图7是根据本公开实施例的电子设备的原理框图。











