
技术摘要:
本发明涉及模拟靶弹技术领域,具体为一种高速巡航式靶弹,包括气动外形单元、飞行控制单元、脱离回收单元和动力单元,其中,所述脱离回收单元设置在设备箱中,脱离回收单元包括伞降装置、助推装置、定位装置、数据处理器和脱离控制器;所述伞降装置安装在设备箱的上侧 全部
背景技术:
目前,由于国内靶弹种类偏少,防空武器单元定型试验和军事训练中打靶大多选 用100-2航明弹、航模等作为靶标,它们的战技术指标与实战状态相差很大,不但达不到训 练的目的,还造成训练中的极大浪费。 专利申请号为2014208535166的中国专利公开了一种防空武器单元试验或训练用 高速巡航靶弹,由气动外形单元、飞行控制单元、伞降单元、动力单元组成。点火发射后,由 动力单元的固体火箭发动机为靶弹提供动力,气动外形单元保证靶弹的飞行状态,飞行控 制单元控制靶弹进入设定高度和航线进行巡航飞行,在飞行过程中,弹载数据终端会将靶 弹的飞行数据实时传输到地面站,供地面人员进行监测和记录。这种靶弹对动作进行修正, 模拟实战中的导弹,但是其依然有如下不足:1.成本造价较高,只能在拦截导弹未命中的情 况下才能回收,拦截导弹若击中了靶弹则会直接击溃伞降单元,导致伞降单元无法回收靶 弹;2.通过数据终端向地面站传输靶弹的飞行数据时,存在着较长的数据延迟,且还需要在 靶弹飞行路径上布置多台的雷达车作为地面信号中继站,使用起来很麻烦。
技术实现要素:
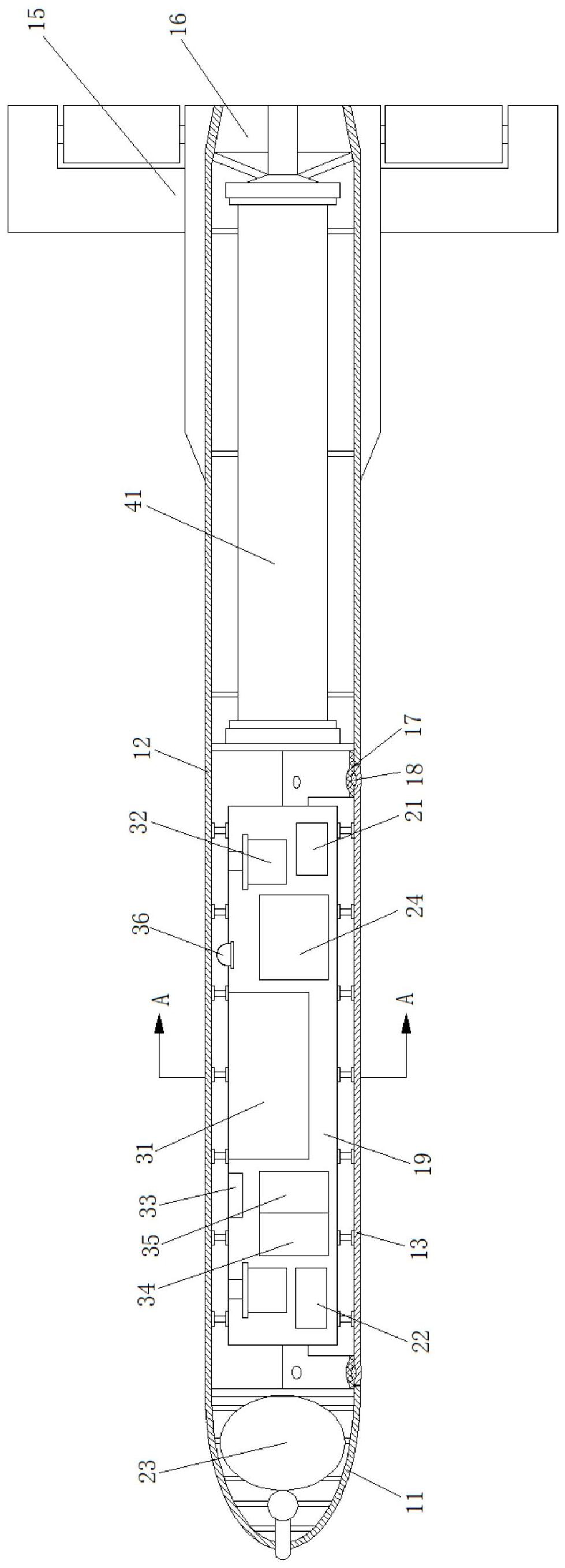
为了上述现有技术中靶弹的不足,本发明提供一种高速巡航式靶弹。 本发明解决其技术问题采用以下技术方案来实现: 本发明所述的一种高速巡航式靶弹,包括: 气动外形单元,所述气动外形单元包括头锥、弹体、蒙皮、机翼、尾翼和尾锥,所述 弹体依次连接头锥、机翼、尾翼和尾锥,所述弹体的下部开设有矩形缺口,所述矩形缺口的 内壁固定连接有方框形的连接片,所述连接片的下部通过多个锁点固定蒙皮,所述蒙皮与 连接片的锁点处设置有火药包,所述蒙皮的上侧固定连接有设备箱; 飞行控制单元,所述飞行控制单元设置在设备箱中,飞行控制单元包括供电电池、 飞行控制器、雷达探测器和数据存储器,所述雷达探测器安装在头锥内,所述供电电池、飞 行控制器和数据存储器均安装在设备箱内,所述飞行控制器用于控制机翼和尾翼,雷达探 测器用于探测拦截导弹的位置,数据存储器用于存储飞行控制器中的飞行数据以及雷达探 测器探测信息; 脱离回收单元,所述脱离回收单元设置在设备箱中,脱离回收单元包括伞降装置、 助推装置、定位装置、数据处理器和脱离控制器;所述伞降装置安装在设备箱的上侧,伞降 装置由脱离控制器控制,所述助推装置安装在设备箱的上侧,且助推装置的喷射口向上布 置,助推装置由脱离控制器控制,所述定位装置用于获取设备箱的位置信息,数据处理器用 于对自身的飞行轨迹与雷达探测器所探测的拦截导弹的飞行轨迹进行计算,判断靶弹是否 会与拦截导弹的轨迹交叉,若飞行轨迹与拦截导弹的飞行有交点,则将电子信号传输到脱 3 CN 111595203 A 说 明 书 2/4 页 离控制器; 动力单元,所述动力单元由固体火箭发动机提供动力,所述固体火箭发动机安装 在弹体的尾部,固体火箭发动机与设备箱间通过机翼隔板隔离,固体火箭发动机头部与机 翼隔板连接。 优选的,所述脱离回收单元还包括摄像装置,所述摄像装置安装在设备箱的上侧, 摄像装置用于对弹体进行拍摄,并将拍摄的图像传输到数据存储器中。 优选的,所述定位装置为GPS卫星定位器和北斗卫星定位器。 优选的,所述设备箱包括箱体、上盖和锁具,所述箱体与上盖间通过锁具固定连 接。 优选的,所述飞行控制器采用ARM FPGA嵌入式硬件电路。 优选的,所述固体火箭发动机为单室双推力固体火箭发动机,安装方式为端挂式。 与现有技术相比,本发明的有益效果是:本发明所述的一种高速巡航式靶弹,通过 增加脱离回收单元,能够在拦截导弹摧毁靶弹前,利用设备箱将供电电池、飞行控制器、数 据存储器、伞降装置、助推装置、定位装置、数据处理器和脱离控制器进行保留,所有飞行数 据也都会被保留在数据存储器中,为了拍摄拦截导弹摧毁靶弹的过程,设备箱的上侧还安 装了用于对弹体进行拍摄的摄像装置,摄像装置将拍摄的图像传输到数据存储器中,脱离 控制器再控制伞降装置启动降落伞,使得设备箱能够安全降落,同时利用定位装置能够快 速的缺点设备箱的位置以便于回收设备箱,定位装置为GPS卫星定位器和北斗卫星定位器, 北斗卫星定位器能够在中国境内提供更为精准的定位信息,GPS卫星定位器能够在全世界 范围内提供定位信息,能够节约靶弹的制造成本,且能够回收大量的实验数据,为了避免实 验数据被泄漏,设备箱的箱体与上盖间通过锁具固定连接,需要用对应的钥匙才能打开,本 发明具有诸多的优点,具有很强的创造性和实用性。 附图说明 图1为本发明所述的一种高速巡航式靶弹的结构示意图; 图2为本发明所述的一种高速巡航式靶弹的仰视图; 图3为图1中A-A剖视图。 图中: 头锥11、弹体12、蒙皮13、机翼14、尾翼15、尾锥16、连接片17、火药包18、设备箱19、 箱体191、上盖192、锁具193; 供电电池21、飞行控制器22、雷达探测器23、数据存储器24; 伞降装置31、助推装置32、定位装置33、数据处理器34、脱离控制器35、摄像装置 36; 固体火箭发动机41。 具体实施例 下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完 整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于 本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他 4 CN 111595203 A 说 明 书 3/4 页 实施例,都属于本发明保护的范围。 请参阅图1-3,下面提供一种较佳的实施例: 一种高速巡航式靶弹,包括: 由头锥11、弹体12、蒙皮13、机翼14、尾翼15和尾锥16所组成的气动外形单元,弹体 12依次连接头锥11、机翼14、尾翼15和尾锥16,弹体12的下部开设有矩形缺口,矩形缺口的 内壁固定连接有方框形的连接片17,连接片17的下部通过多个锁点固定蒙皮13,蒙皮13与 连接片17的锁点处设置有火药包18,蒙皮13的上侧固定连接有设备箱19; 设置在设备箱19中的飞行控制单元,飞行控制单元包括供电电池21、飞行控制器 22、雷达探测器23和数据存储器24,所述雷达探测器23安装在头锥11内,所述供电电池21、 飞行控制器22、数据存储器24均安装在设备箱19内,飞行控制器22采用ARM9 FPGA经典嵌入 式硬件电路,飞行控制器22用于控制机翼14和尾翼15,实现靶弹的机动和飞行轨迹的调整, 雷达探测器23用于探测拦截导弹的位置,以便于获取拦截导弹的飞行轨迹,数据存储器24 用于存储飞行控制器22中的飞行数据以及雷达探测器23探测信息,供电电池21向靶弹中的 所有需要用电的电子元器件进行供电; 脱离回收单元,脱离回收单元设置在设备箱19中,脱离回收单元包括伞降装置31、 助推装置32、定位装置33、数据处理器34和脱离控制器35;伞降装置31安装在设备箱19的上 侧,伞降装置31由脱离控制器35控制,助推装置32安装在设备箱19的上侧,且助推装置32的 喷射口向上布置,助推装置32由脱离控制器35控制,定位装置33用于获取设备箱19的位置 信息,数据处理器34用于对自身的飞行轨迹与雷达探测器23所探测的拦截导弹的飞行轨迹 进行计算,判断靶弹是否会与拦截导弹的轨迹交叉,若飞行轨迹与拦截导弹的飞行有交点, 则将电子信号传输到脱离控制器35,脱离控制器35通过引线控制火药包18; 工作时,数据处理器34通过雷达探测器23获取拦截导弹的位置信息,并通过拦截 导弹的位置信息计算处拦截导弹的运行轨迹,并与飞行控制器22中的自身飞行轨迹做对 比,判断拦截导弹是否存在交汇点,当拦截导弹与自身靶弹存在较会点后,在脱离回收单元 内设置阈值,阈值为拦截导弹爆炸的距离加上一个固定的值,该固定的值是预留给脱离回 收单元工作的时间,在雷达监测到拦截导弹与靶弹见的距离进入预设的阈值内时,此时脱 离控制器35先通过引线点燃火药包18,火药包18产生爆炸将蒙皮13与连接片17的锁点崩 裂,使得蒙皮13与连接片17脱离,此时脱离控制器35再控制助推装置32将设备箱19快速的 向下推出,助推装置32可以是高压空气助推器或火箭助推器,助推装置32能够扯断连接线 路,使得设备箱19与弹体12完全脱离,之后拦截导弹会爆炸,通过爆炸的碎片击毁靶弹,而 设备箱19内的供电电池21、飞行控制器22、数据存储器24、伞降装置31、助推装置32、定位装 置33、数据处理器34和脱离控制器35能够被保留,所有飞行数据也都会被保留在数据存储 器24中,为了拍摄拦截导弹摧毁靶弹的过程,设备箱19的上侧还安装了用于对弹体12进行 拍摄的摄像装置36,摄像装置36将拍摄的图像传输到数据存储器24中,脱离控制器35再控 制伞降装置31启动降落伞,使得设备箱19能够安全降落,同时利用定位装置33能够快速的 缺点设备箱19的位置以便于回收设备箱19,定位装置33为GPS卫星定位器和北斗卫星定位 器,北斗卫星定位器能够在中国境内提供更为精准的定位信息,GPS卫星定位器能够在全世 界范围内提供定位信息,能够节约靶弹的制造成本,且能够回收大量的实验数据,为了避免 实验数据被泄漏,设备箱19的箱体191与上盖192间通过锁具193固定连接,需要用对应的钥 5 CN 111595203 A 说 明 书 4/4 页 匙才能打开。 动力单元,动力单元由固体火箭发动机41提供动力,固体火箭发动机41安装在弹 体12的尾部,固体火箭发动机41与设备箱19间通过机翼14隔板隔离,固体火箭发动机41头 部与机翼14隔板连接,固体火箭发动机41为单室双推力固体火箭发动机41,安装方式为端 挂式。 应当理解,本发明的各部分可以用硬件、软件、固件或它们的组合来实现。在上述 实施例中,多个步骤或方法可以用存储在数据存储器(24)中且由合适的指令执行单元执行 的软件或固件来实现。例如,如果用硬件来实现,和在另一实施例中一样,可用本领域公知 的下列技术中的任一项或他们的组合来实现:具有用于对数据信号实现逻辑功能的逻辑门 电路的离散逻辑电路,具有合适的组合逻辑门电路的专用集成电路,可编程门阵列(PGA), 现场可编程门阵列(FPGA)等。 在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等 术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连 接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内 部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员 而言,可以根据具体情况理解上述术语在本发明中的具体含义。 在本发明中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以 是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在 第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示 第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第 一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。 虽然在上文中已经参考实施例对本发明进行了描述,然而在不脱离本发明的范围 的情况下,可以对其进行各种改进并且可以用等效物替换其中的部件。尤其是,只要不存在 结构冲突,本发明所披露的实施例中的各项特征均可通过任意方式相互结合起来使用,在 本说明书中未对这些组合的情况进行穷举性的描述仅仅是出于省略篇幅和节约资源的考 虑。因此,本发明并不局限于文中公开的特定实施例,而是包括落入权利要求的范围内的所 有技术方案。 6 CN 111595203 A 说 明 书 附 图 1/3 页 图1 7 CN 111595203 A 说 明 书 附 图 2/3 页 图2 8 CN 111595203 A 说 明 书 附 图 3/3 页 图3 9











