
技术摘要:
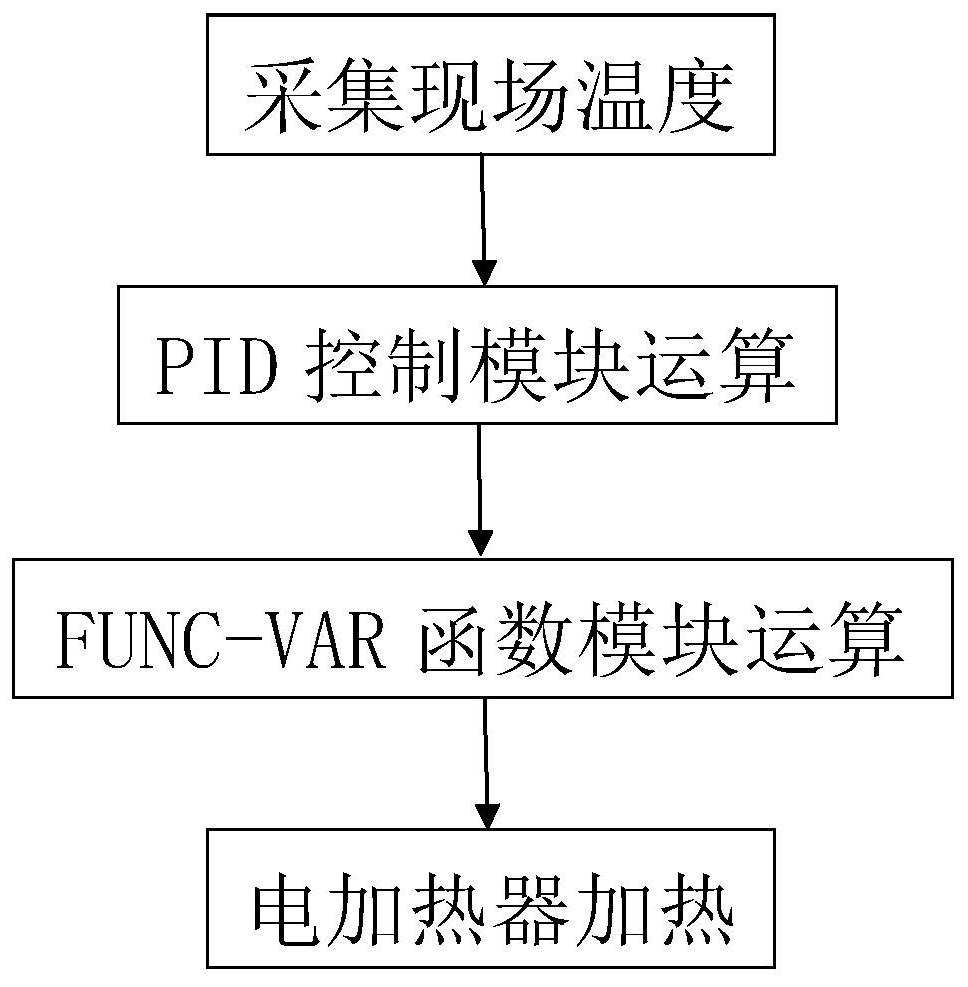
本发明公开了一种DCS对电加热器的线性控制方法。为了克服现有技术对电加热器的控制具有大时滞性,难以达到预期的控制效果的问题;本发明包括以下步骤:S1:温度传感器采集现场的温度,将采集到的温度信息传输到PID控制模块;S2:PID控制模块经过PID控制运算后输出操纵 全部
背景技术:
电加热器是将电能转换为热能的过程。是工业生产中很常见的一类设备,由于其 一般带有大时滞、非线性难以建立精确的数学模型等特点,在实际生产中采用传统的PID控 制策略常常难以得到期望的控制效果。 例如,一种在中国专利文献上公开的“基于PID控制的电加热炉智能温度控制系统 设计方法”,其公告号CN109634319A,包括PID控制器设计:控制系统采用智能控制算法,即 PID控制算法,通过对于设定温度和实际温度的差值的比例,微分,积分三者结合得到的算 法结果来控制执行机构的执行状态,从而可以让控制系统中的控制时间,超调量,滞后反应 以及最后的稳定程度都能有较明显的改善。该方法在实际生产中无法解决大时滞性带来的 问题,难以达到预期的控制效果。
技术实现要素:
本发明主要解决现有技术对电加热器的控制具有大时滞性,难以达到预期的控制 效果的问题;提供一种DCS对电加热器的线性控制方法,线性控制电加热器,解决其大时滞 性带来的控制影响。 本发明的上述技术问题主要是通过下述技术方案得以解决的: 本发明包括以下步骤: S1:温度传感器采集现场的温度,将采集到的温度信息传输到PID控制模块; S2:PID控制模块经过PID控制运算后输出操纵变量MV;操纵变量MV作为输入值输入给 FUNC-VAR函数模块;FUNC-VAR函数模块运算后输出一个与输入呈线性的控制量; S3:FUNC-VAR输出的控制量控制电加热器开度,进行加热工作。 一般采用的PID控制电加热器,其电加热器开度-热量曲线在起始段与末尾段变化 缓慢,而在中间段相对于首尾两端来说变化速率快。由于PID参数中的P是无法调节的,所以 其变化速率无法统一,电加热器不好控制。在PID输出后经过FUNC-VAR函数运算,FUNC-VAR 函数的输出与输入呈线性关系,根据PID的输出改变调节速率,贴合开度与热量变化的固有 规律,调节更加可靠,解决电加热器的时滞性问题。 作为优选,所述的FUNC-VAR函数模块中的运算函数为至多七段的线性函数组合, 线性函数为f(x)=ax b;其中,a、b为常数。FUNC-VAR函数模块为多段线性函数的组合,通过 FUNC-VAR函数模块调整PID模块输出的变化速率,贴合电加热器开度-热量的变化曲线,使 得调节更加可靠,解决电加热器的时滞性问题。 作为优选,所述的FUNC-VAR函数模块中的控制函数通过以下步骤确定: A1:将DCS电加热器的原始开度等分20份; 4 CN 111610714 A 说 明 书 2/5 页 A2:根据热量与角度关系的公式得到DCS的电加热器原始开度与热量的关系以及电加 热器原始开度与PID的操纵变量MV的关系;公式为: 其中,W为热量,c为常数; A3:根据电加热器原始开度与PID的操纵变量MV的关系,以PID的操纵变量MV为X轴,以 电加热器的原始开度为Y轴绘制曲线图,分析确定参数点; A4:根据参数点确定FUNC-AVR函数模块中的线性函数。 通过数据计算分析得到一个相对精确的数学模型,确定线性关系,使得调节更加 精确。 作为优选,所述的参数点在曲线斜率大处分布密集。 曲线斜率大说明变化速度快,需要更多的参数点拟合,保证控制的精确和可靠性, 解决了电加热器的时滞性问题。 作为优选,所述的FUNC-VAR函数模块中参数点选取如下表所示: X轴 Y轴 0 0 0.645 10 2.12 15 14.9 30 85.1 70 97.9 85 99.35 90 100 100 相邻的两个参数点之间构成一个线性函数。 通过FUNC-VAR函数模块调整PID模块输出的变化速率,贴合电加热器开度-热量的 变化曲线,使得调节更加可靠,解决电加热器的时滞性问题。 作为优选,所述的电加热器的加热对象为液体。液体多为加热的对象,以液体为对 象建模,其建立的FUNC-VAR函数更具有普适性。 本发明的有益效果是:本发明通过在PID环节后增加FUNC-VAR函数模块,使得PID 操作变量MV的变化速率适应理论的操作变量MV-电加热器开度曲线变化,使得控制具有更 好的线性控制精度,控制更加可靠,解决了电加热器的时滞性问题。 附图说明 图1是本发明的一种控制方法流程图。 图2是本发明的原始开度-热量曲线图。 图3是本发明的操作变量MV-电加热器开度曲线图。 图4是本发明FUNC-VAR函数模块线性函数拟合图。 5 CN 111610714 A 说 明 书 3/5 页











