
技术摘要:
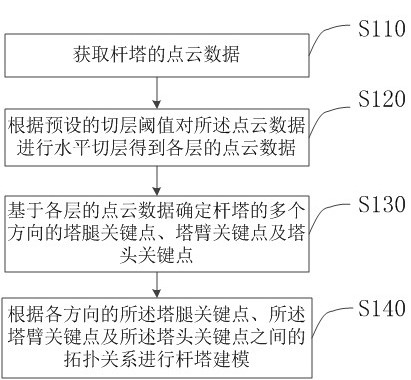
本发明公开了一种杆塔建模方法、装置、终端设备及计算机可读存储介质,该方法包括:获取杆塔的点云数据;根据预设的切层阈值对所述点云数据进行水平切层得到各层的点云数据;基于各层的点云数据确定杆塔的塔腿关键点、塔臂关键点及塔头关键点;根据所述塔腿关键点、所 全部
背景技术:
随着我国电网对智能化精细化巡检作业需求不断深入,三维数字化电网技术变的 越来越重要。其中输电杆塔的结构及性能直接直接影响输电线路的安全性、经济性和可靠 性。因此,输电杆塔的三维建模是三维数字化输电工程与智能电网不可或缺的一部分。 在实际应用中,由于杆塔数量大种类多,使得人工建模或者半人工半自动化建模 效率非常低效。因此,传统的人工建模或者半人工半自动化建模方法并不能达到高效的建 模效果。 现有的自动化的杆塔建模方式往往通过单个杆塔点云数据进行分割,利用细分子 集的点数、特征值比值等特征获得杆塔的分割位置,对中长臂横梁以上的点云,确定主方向 后,根据此前确定的分割位置,采用RANSAC算法进行线性拟合,确定结构参数实现自动化的 建模。然而,该种方案中所需参数比较多,计算量大,且通过单个杆塔点云数据进行建模的 方案不适合于不对称的杆塔模型,适用性较低,建模结果不准确。
技术实现要素:
鉴于上述问题,本发明实施例的目的在于提供一种杆塔建模方法 、装置、终端设 备及计算机可读存储介质,以解决现有技术的不足。 根据本发明的一个实施方式,提供一种杆塔建模方法,包括: 获取杆塔的点云数据; 根据预设的切层阈值对所述点云数据进行水平切层得到各层的点云数据; 基于各层的点云数据确定杆塔的多个方向的塔腿关键点、塔臂关键点及塔头关键点; 根据各方向的所述塔腿关键点、所述塔臂关键点及所述塔头关键点之间的拓扑关系进 行杆塔建模。 在上述的杆塔建模方法中,所述基于各层的点云数据确定杆塔的多个方向的塔腿 关键点、塔臂关键点及塔头关键点包括: 分别计算每一层点云数据的最小方向包围盒; 根据各层对应的最小方向包围盒分离所述杆塔的多个塔腿线; 在所述塔腿线中提取多个方向上的塔腿关键点、塔臂关键点及塔头关键点,其中,所述 多个方向包括各层的点云数据投影到平面上的四边形的四个角点的方向。 在上述的杆塔建模方法中,所述根据各层对应的最小方向包围盒分离所述杆塔的 塔腿线之前还包括: 将各层对应的最小方向包围盒调整为相同方向,并针对调整后的各层最小方向包围盒 执行分离所述杆塔的塔腿线的操作。 4 CN 111581711 A 说 明 书 2/9 页 在上述的杆塔建模方法中,所述将各层对应的最小方向包围盒调整为相同方向包 括: 分别计算每一层最小方向包围盒的在水平方向上的两边对应的模长; 将每一层最大模长作为杆塔臂方向,计算该层中所述杆塔臂方向与所述水平方向之间 的夹角; 根据所述夹角与所述杆塔臂方向的轴向计算旋转矩阵; 根据所述旋转矩阵对该层中所述最小方向包围盒进行旋转,以将各层对应的最小方向 包围盒调整为相同方向。 在上述的杆塔建模方法中,所述在所述塔腿线中提取多个方向上的塔腿关键点、 塔臂关键点及塔头关键点之前还包括: 根据每一层的塔腿线对应点云数据投影到平面中得到投影点; 根据各层塔腿线的投影点组成的四边形的边长及面积去除塔腿线中的异常点云数据, 基于去除异常点云数据后的塔腿线执行提取所述塔腿关键点、所述塔臂关键点及所述塔头 关键点的操作。 在上述的杆塔建模方法中,所述在所述塔腿线中提取多个方向上的塔腿关键点、 塔臂关键点及塔头关键点之前还包括: 根据预设的简化条件简化所述塔腿线对应的点云数据; 重复执行上述步骤直至重复执行次数达到预设次数时停止执行; 基于简化后的所述塔腿线执行提取多个方向上的塔腿关键点、塔臂关键点及塔头关键 点的操作。 在上述的杆塔建模方法中,所述预设的简化条件包括当前层的上一层最小方向包 围盒与当前层的下一层的最小方向包围盒之间的夹角大于预设角度; 相应地,所述根据预设的简化条件简化所述塔腿线对应的点云数据包括: 去除不符合所述预设的简化条件的最小方向包围盒,以对塔腿线进行简化。 根据本发明的另一个实施方式,提供一种杆塔建模装置,该装置包括: 获取模块,用于获取杆塔的点云数据; 切层模块,用于根据预设的切层阈值对所述点云数据进行水平切层得到各层的点云数 据; 确定模块,用于基于各层的点云数据确定杆塔的多个方向的塔腿关键点、塔臂关键点 及塔头关键点; 建模模块,用于根据所述塔腿关键点、所述塔臂关键点及所述塔头关键点之间的拓扑 关系进行杆塔建模。 根据本发明的再一个实施方式,提供一种终端设备,所述终端设备包括存储器以 及处理器,所述存储器用于存储计算机程序,所述处理器运行所述计算机程序以使所述终 端设备执行上述的杆塔建模方法。 根据本发明的又一个实施方式,提供一种计算机可读存储介质,其存储有所述终 端设备中所用的所述计算机程序。 本公开的实施例提供的技术方案可以包括如下有益效果: 本发明中一种杆塔建模方法 、装置、终端设备及计算机可读存储介质,可以根据多个 5 CN 111581711 A 说 明 书 3/9 页 方向上的塔腿关键点、塔臂关键点及塔头关键点对杆塔进行建模,这种建模方式对现有的 对称杆塔及不对称的杆塔均可使用,且所需参数比较少,自动化程度高,效率较快,建模结 果比较准确。 为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合 所附附图,作详细说明如下。 附图说明 为了更清楚地说明本发明的技术方案,下面将对实施例中所需要使用的附图作简 单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对本发明 保护范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根 据这些附图获得其他相关的附图。 图1示出了本发明第一实施例提供的一种杆塔建模方法的流程示意图; 图2示出了本发明第二实施例提供的一种杆塔建模方法的流程示意图; 图3示出了本发明第三实施例提供的一种杆塔建模方法的流程示意图; 图4示出了本发明第四实施例提供的一种杆塔建模方法的流程示意图; 图5示出了本发明第五实施例提供的一种杆塔建模方法的流程示意图; 图6示出了本发明第六实施例提供的一种杆塔建模装置的结构示意图。 主要元件符号说明: 600-杆塔建模装置;610-获取模块;620-切层模块;630-确定模块;640-建模模块。











