
技术摘要:
本申请实施例提供一种环境区域划分与定点清扫方法、设备及存储介质。在本申请实施例中,自移动设备在对工作区域进行遍历过程中采集多个采样点的高度信息,结合多个采样点的高度信息和水平位置信息可以对工作区域进行更细粒度的分区,并将划分出的子区域标识在环境地图 全部
背景技术:
随着人工智能技术的发展,家用电器也趋向于智能化。例如,扫地机器人可凭借一 定的人工智能,绘制环境地图,并依赖环境地图自动完成地面清扫任务,将用户从清洁工作 中解放出来。
技术实现要素:
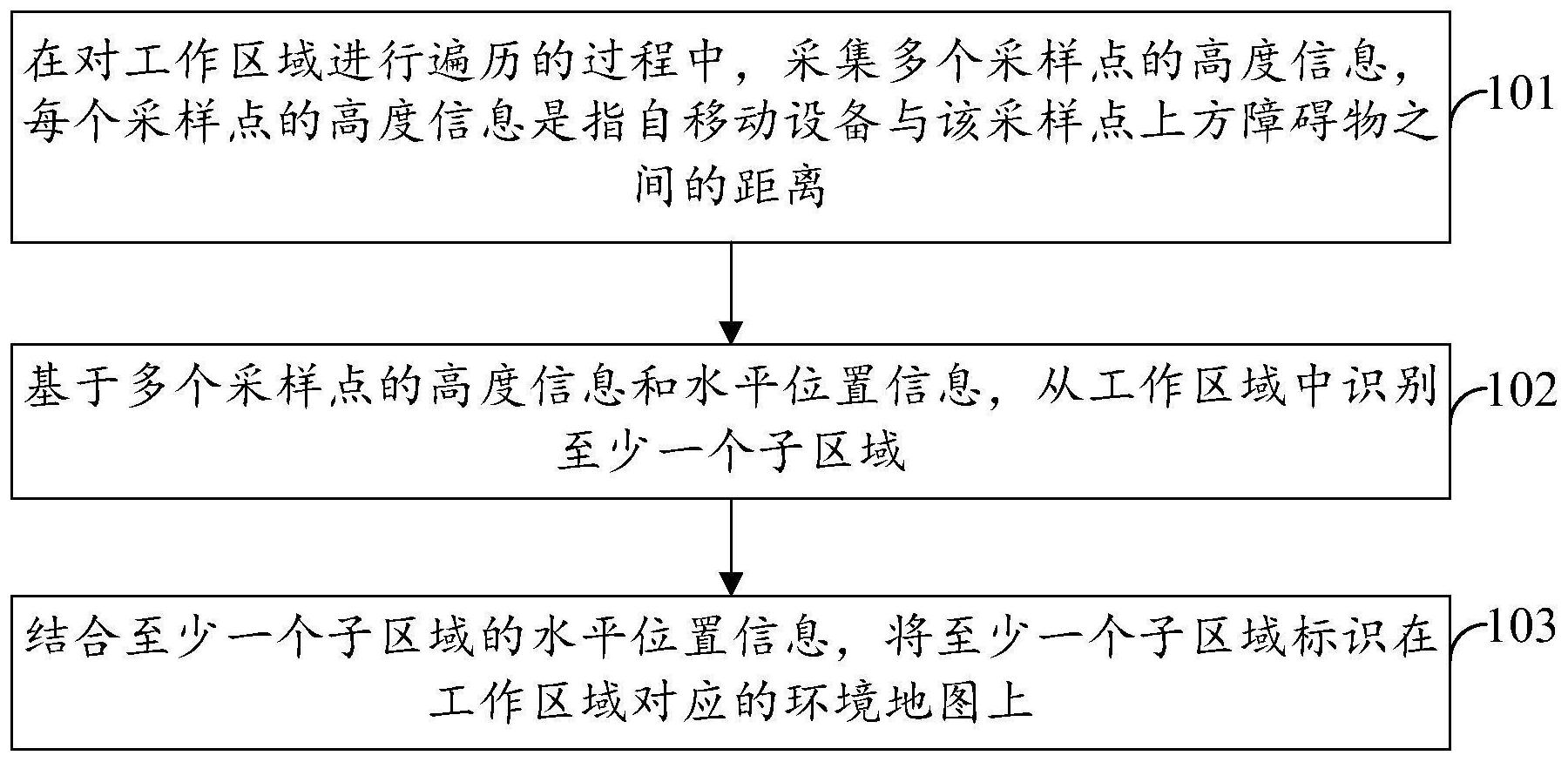
本申请实施例提供一种环境区域划分方法,适用于自移动设备,所述方法包括:在 对工作区域进行遍历的过程中,采集多个采样点的高度信息,每个采样点的高度信息是指 自移动设备与该采样点上方障碍物之间的距离;基于多个采样点的高度信息和水平位置信 息,从所述工作区域中识别至少一个子区域;结合所述至少一个子区域的水平位置信息,将 所述至少一个子区域标识在所述工作区域对应的环境地图上。 本申请实施例还提供一种定点清扫方法,适用于扫地机器人,所述方法包括:响应 定点清扫触发事件,结合工作区域对应的环境地图,确定定点清扫区域的位置;从当前位置 移动至所述定点清扫区域,并针对所述定点清扫区域执行定点清扫任务;其中,所述环境地 图包含至少一个子区域,所述至少一个子区域是根据所述扫地机器人遍历过程中采集到的 多个采样点的高度信息和水平位置信息划分的,所述定点清扫区域是所述至少一个子区域 中的子区域。 本申请实施例还提供一种定点清扫方法,适用于终端设备,所述方法包括:显示扫 地机器人的工作区域对应的环境地图;所述环境地图包括至少一个子区域,所述至少一个 子区域是根据所述扫地机器人遍历过程中采集到的多个采样点的高度信息和水平位置信 息划分的;响应用户在所述环境地图上的选择操作,确定需要定点清扫的子区域,并设置定 点清扫的时间信息;向所述扫地机器人发送定点清扫任务,所述定点清扫任务包含定点清 扫的时间信息和需要定点清扫的子区域的标识,以供所述扫地机器人执行定点清扫任务。 本申请实施例还提供一种自移动设备,包括:设备本体,所述设备本体上设有一个 或多个处理器,以及一个或多个存储计算机指令的存储器;所述一个或多个处理器,用于执 行所述计算机指令,以用于:在对工作区域进行遍历的过程中,采集多个采样点的高度信 息,每个采样点的高度信息是指自移动设备与该采样点上方障碍物之间的距离;基于多个 采样点的高度信息和水平位置信息,从所述工作区域中识别至少一个子区域;结合所述至 少一个子区域的水平位置信息,将所述至少一个子区域标识在所述工作区域对应的环境地 图上。 本申请实施例还提供一种存储有计算机指令的计算机可读存储介质,当所述计算 机指令被一个或多个处理器执行时,致使所述一个或多个处理器执行包括以下的动作:在 6 CN 111596651 A 说 明 书 2/18 页 对工作区域进行遍历的过程中,采集多个采样点的高度信息,每个采样点的高度信息是指 自移动设备与该采样点上方障碍物之间的距离;基于多个采样点的高度信息和水平位置信 息,从所述工作区域中识别至少一个子区域;结合所述至少一个子区域的水平位置信息,将 所述至少一个子区域标识在所述工作区域对应的环境地图上。 本申请实施例还提供一种扫地机器人,包括:机械本体,所述机械本体上设有一个 或多个处理器,以及一个或多个存储计算机指令的存储器;所述一个或多个处理器,用于执 行所述计算机指令,以用于:响应定点清扫触发事件,结合工作区域对应的环境地图,确定 定点清扫区域的位置;从当前位置移动至所述定点清扫区域,并针对所述定点清扫区域执 行定点清扫任务;其中,所述环境地图包含至少一个子区域,所述至少一个子区域是根据所 述扫地机器人遍历过程中采集到的多个采样点的高度信息和水平位置信息划分的,所述定 点清扫区域是所述至少一个子区域中的子区域。 本申请实施例还提供一种存储有计算机指令的计算机可读存储介质,当所述计算 机指令被一个或多个处理器执行时,致使所述一个或多个处理器执行包括以下的动作:响 应定点清扫触发事件,结合工作区域对应的环境地图,确定定点清扫区域的位置;从当前位 置移动至所述定点清扫区域,并针对所述定点清扫区域执行定点清扫任务;其中,所述环境 地图包含至少一个子区域,所述至少一个子区域是根据扫地机器人遍历过程中采集到的多 个采样点的高度信息和水平位置信息划分的,所述定点清扫区域是所述至少一个子区域中 的子区域。 本申请实施例还提供一种终端设备,包括:一个或多个处理器,显示器,通信组件 以及一个或多个存储计算机指令的存储器;所述一个或多个处理器,用于执行所述计算机 指令,以用于:在所述显示器上显示扫地机器人的工作区域对应的环境地图;所述环境地图 包括至少一个子区域,所述至少一个子区域是根据所述扫地机器人遍历过程中采集到的多 个采样点的高度信息和水平位置信息划分的;响应用户在所述环境地图上的选择操作,确 定需要定点清扫的子区域,并设置定点清扫的时间信息;通过所述通信组件向所述扫地机 器人发送定点清扫任务,所述定点清扫任务包含定点清扫的时间信息和需要定点清扫的子 区域的标识,以供所述扫地机器人执行定点清扫任务。 本申请实施例还提供一种存储有计算机指令的计算机可读存储介质,当所述计算 机指令被一个或多个处理器执行时,致使所述一个或多个处理器执行包括以下的动作:显 示扫地机器人的工作区域对应的环境地图;所述环境地图包括至少一个子区域,所述至少 一个子区域是根据所述扫地机器人遍历过程中采集到的多个采样点的高度信息和水平位 置信息划分的;响应用户在所述环境地图上的选择操作,确定需要定点清扫的子区域,并设 置定点清扫的时间信息;向所述扫地机器人发送定点清扫任务,所述定点清扫任务包含定 点清扫的时间信息和需要定点清扫的子区域的标识,以供所述扫地机器人执行定点清扫任 务。 在本申请实施例中,自移动设备在对工作区域进行遍历过程采集多个采样点的高 度信息,结合多个采样点的高度信息和水平位置信息可以对工作区域进行更细粒度的分 区,并将划分出的子区域标识在环境地图上;进而,基于标识有子区域的环境地图执行清扫 任务,可以更加灵活地选定清扫区域的范围,清扫区域的范围可以更小、更精确,有利于提 高清扫任务的灵活性和清扫效率。 7 CN 111596651 A 说 明 书 3/18 页 附图说明 此处所说明的附图用来提供对本申请的进一步理解,构成本申请的一部分,本申 请的示意性实施例及其说明用于解释本申请,并不构成对本申请的不当限定。在附图中: 图1a为本申请示例性实施例提供的一种环境区域划分方法的流程示意图; 图1b为本申请示例性实施例提供的向上测距的激光传感器A和水平测距的激光传 感器B采集到的距离信息的散点拟合曲线; 图2a为本申请示例性实施例提供的针对已知区域划分子区域的过程的示意图; 图2b为本申请示例性实施例提供的针对未知区域划分子区域的过程的示意图; 图3a为本申请示例性实施例提供的椅子、床和天花板上吊灯对应的高度信息的比 对关系示意图; 图3b为本申请示例性实施例提供的床下区域的样式图及自移动设备弓字形移动 在该区域形成的轨迹图; 图3c为本申请示例性实施例提供的灯下区域的样式图及自移动设备弓字形移动 在该区域形成的轨迹图; 图4为本申请示例性实施例提供的标识有至少一个子区域的环境地图的表征示意 图; 图5为本申请示例性实施例提供的一种定点清扫方法的流程示意图; 图6为本申请示例性实施例提供的一种自移动设备的结构示意图; 图7为本申请示例性实施例提供的一种扫地机器人的结构示意图; 图8为本申请示例性实施例提供的一种终端设备的结构示意图。











