
技术摘要:
本发明实施例提供的一种股骨端前后轴线的确定方法、装置和计算机设备的技术方案中,从获取的膝关节图像中确定出滑车面区域,根据滑车面区域,确定出多个上边缘区域,上边缘区域为滑车面区域与横断面的交线,计算每个上边缘区域中每个像素点的斜率,根据每个像素点的斜 全部
背景技术:
】 全膝关节置换手术过程中需要确定股骨假体旋转角度,在医学上,对于无严重畸 形的病人,通常采用股骨端前后轴线确定出股骨假体旋转角度。而在相关技术中,通常需要 医生在手术过程中由医生利用电刀在病人股骨髁徒手勾画,确定出股骨端前后轴线,从而 导致获取的股骨端前后轴线不精确的问题。 【
技术实现要素:
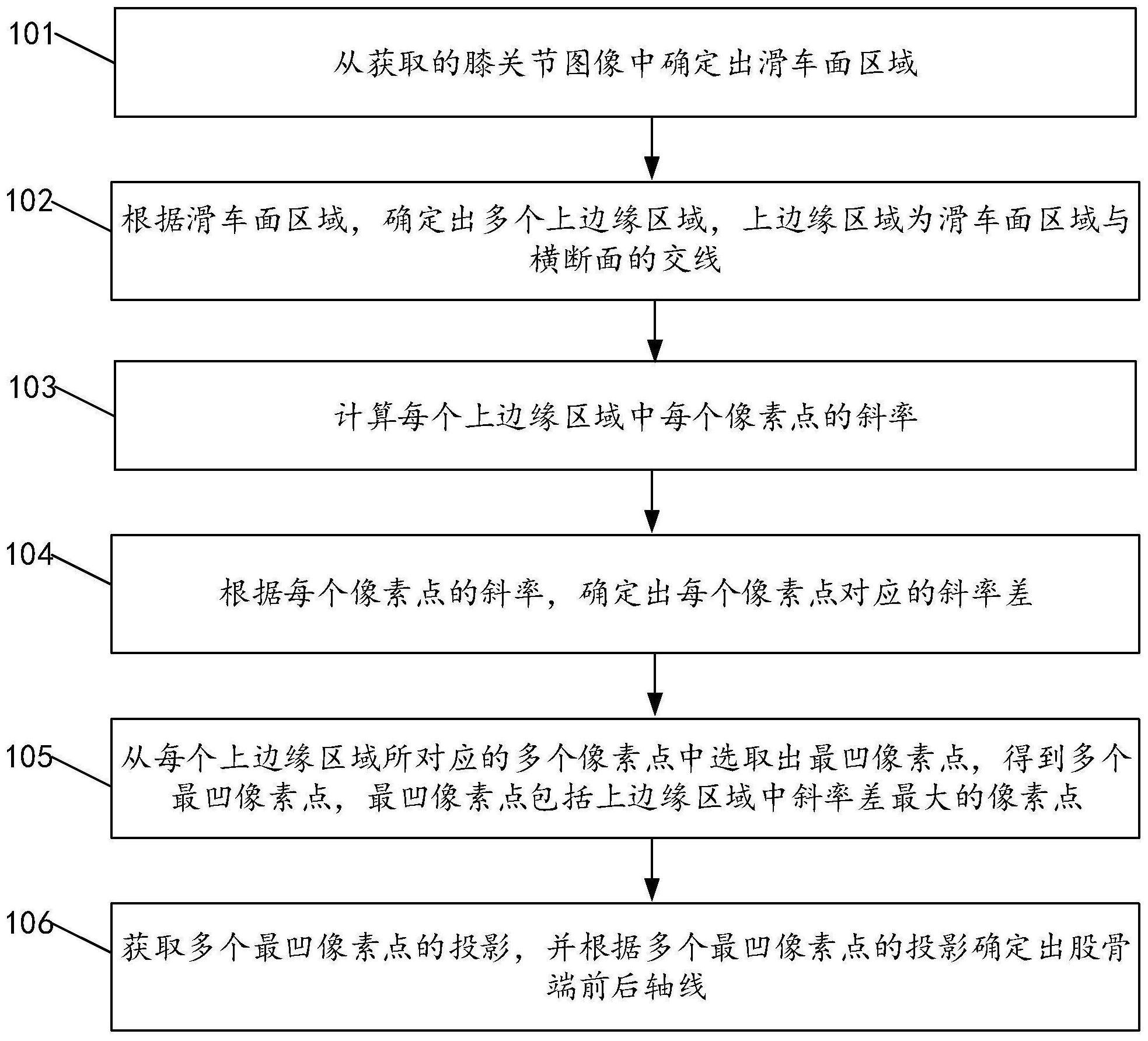
】 有鉴于此,本发明提供一种股骨端前后轴线的确定方法、装置和计算机设备,通过 确定滑车面区域的像素点斜率,从而能够根据斜率的分布状况确定出股骨端前后轴线,避 免了手工勾画股骨端前后轴线造成工作量大且前后轴线不精确的问题,提高了所确定的股 骨端前后轴线的精确程度,提高了确定股骨端前后轴线的效率。 另一方面,本发明实施例提供了一种股骨端前后轴线的确定方法,包括: 从获取的膝关节图像中确定出滑车面区域; 根据所述滑车面区域,确定出多个上边缘区域,所述上边缘区域为所述滑车面区 域与横断面的交线; 计算每个所述上边缘区域中每个像素点的斜率; 根据所述每个像素点的斜率,确定出每个像素点对应的斜率差; 从每个所述上边缘区域所对应的多个像素点中选取出最凹像素点,得到多个最凹 像素点,所述最凹像素点包括所述上边缘区域中斜率差最大的像素点; 获取所述多个最凹像素点的投影,并根据所述多个最凹像素点的投影确定出股骨 端前后轴线。 可选地,所述从获取的膝关节图像中确定出滑车面区域,包括: 在获取的膝关节图像中建立三维空间坐标系,所述三维空间坐标包括x方向、y方 向以及z方向,x方向用于指示矢状面,y方向用于指示冠状面,z方向用于指示横断面; 在建立三维空间坐标系的膝关节图像中,通过用户输入所述z方向的起始位置和 结束位置,确定出多个z方向的搜索区域,所述z方向的搜索区域包括滑车面区域; 通过搜索顶点坐标的方式,根据所述多个z方向的搜索区域,确定出对应的多个x 方向的搜索区域; 获取每个所述x方向的搜索区域中位于所述冠状面前方的第一个像素点的坐标; 根据多个所述冠状面前方的第一个像素点的坐标,确定出滑车面区域。 可选地,所述通过搜索顶点坐标的方式,根据所述多个z方向的搜索区域,确定出 对应的多个x方向的搜索区域,包括: 4 CN 111583240 A 说 明 书 2/9 页 根据搜索顶点坐标的方式,在所述多个z方向的搜索区域中,获取对应的多个x方 向的起始像素点和终止像素点; 根据所述多个x方向的起始像素点和终止像素点,确定出多个x方向的搜索区域, 所述x方向的搜索区域包括1个x方向的起始像素点和1个x方向的终止像素点。 可选地,所述根据所述滑车面区域,确定出多个上边缘区域,所述上边缘区域为所 述滑车面区域与横断面的交线,包括: 获取所述滑车面区域与多个所述横断面的交线,将每个所述交线确定为上边缘区 域。 可选地,所述斜率包括y坐标斜率; 所述计算每个所述上边缘区域中每个像素点的斜率,包括: 通过公式 计算出每个像素点的y坐标斜率,k表示为y坐标斜率, dy表示为像素点的y方向的坐标,dx表示为像素点的x方向的坐标,x1表示为像素点左侧的x 方向的坐标,x2表示为像素点右侧的x方向的坐标,y1表示为像素点左侧的y方向的坐标,y2 表示为像素点右侧的y方向的坐标。 可选地,所述根据所述每个像素点的斜率,确定出每个像素点对应的斜率差,包 括: 获取所述像素点的左侧多个像素点的斜率之和以及所述像素点的右侧多个像素 点的斜率之和; 将所述像素点的左侧多个像素点的斜率之和减去所述像素点的右侧多个像素点 的斜率之和,计算出所述像素点对应的斜率差。 可选地,在所述从获取的膝关节图像中确定出滑车面区域之前,还包括: 通过均值滤波算法对初始膝关节图像进行图像平滑处理,生成膝关节图像。 另一方面,本发明实施例提供了一种股骨端前后轴线的确定装置,所述装置包括: 第一确定模块,用于从获取的膝关节图像中确定出滑车面区域;根据所述滑车面 区域,确定出多个上边缘区域,所述上边缘区域为所述滑车面区域与横断面的交线; 计算模块,用于计算每个所述上边缘区域中每个像素点的斜率;根据所述每个像 素点的斜率,确定出每个像素点对应的斜率差; 选取模块,用于从每个所述上边缘区域所对应的多个像素点中选取出最凹像素 点,得到多个最凹像素点,所述最凹像素点包括所述上边缘区域中斜率差最大的像素点; 第二确定模块,用于获取所述多个最凹像素点的投影,并根据所述多个最凹像素 点的投影确定出股骨端前后轴线。 另一方面,本发明实施例提供了一种存储介质,所述存储介质包括存储的程序,其 中,在所述程序运行时控制所述存储介质所在设备执行上述的股骨端前后轴线的确定方 法。 另一方面,本发明实施例提供了一种计算机设备,包括存储器和处理器,所述存储 器用于存储包括程序指令的信息,所述处理器用于控制程序指令的执行,所述程序指令被 处理器加载并执行上述的股骨端前后轴线的确定方法的步骤。 本发明实施例提供的技术方案中,从获取的膝关节图像中确定出滑车面区域,根 5 CN 111583240 A 说 明 书 3/9 页 据滑车面区域,确定出多个上边缘区域,上边缘区域为滑车面区域与横断面的交线,计算每 个上边缘区域中每个像素点的斜率,根据每个像素点的斜率,确定出每个像素点对应的斜 率差,从每个上边缘区域所对应的多个像素点中选取出最凹像素点,得到多个最凹像素点, 最凹像素点包括上边缘区域中斜率差最大的像素点,获取多个最凹像素点的投影,并根据 多个最凹像素点的投影确定出股骨端前后轴线,提高了所确定的股骨端前后轴线的精确程 度,提高了确定股骨端前后轴线的效率。 【附图说明】 为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附 图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域 普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其它的附 图。 图1是本发明一实施例所提供的一种股骨端前后轴线的确定方法的流程图; 图2是本发明又一实施例所提供的一种股骨端前后轴线的确定方法的流程图; 图3是本发明一实施例所提供的一种在人体图像中建立三维坐标系的结构示意 图; 图4是本发明一实施例所提供的一种膝关节股骨端的结构示意图; 图5是本发明一实施例所提供的一种滑车面区域的结构示意图; 图6是本发明一实施例所提供的上边缘区域的结构示意图; 图7是本发明一实施例所提供的一种股骨端前后轴线的确定装置的结构示意图; 图8为本发明实施例提供的一种计算机设备的示意图。 【











