
技术摘要:
本发明提供了一种手持式三维扫描系统的实时回环检测方法,首先为关键帧数据添加时序标签,再通过高斯卷积方法进行融合,最后结合多边形求交的原理,实现在更大场景范围内进行实时回环检测,并且与词袋模型方法联合使用,大大提高了回环检测的灵敏度。
背景技术:
采用结构光进行三维扫描时,通常数据拼接过程是依靠点云拼接算法逐帧进行 的,当拼接误差小于一定误差时,视为拼接成功。随着扫描的进行,每一帧的拼接误差不断 累积和传递,并且与扫描帧数正相关,如果不消除这些误差,将对整个扫描的结果产生严重 影响,比如扫描模型出现扭曲,断裂,进而导致扫描数据无法满足使用需求。目前消除误差 比较有效的办法是判断相机是否回到了以前经过的位置,即回环检测。如果发现相机运动 回到了以前经过的某个位置,则说明相机运动出现闭环,将闭环信息用于闭环优化算法,通 过回环优化算法的优化就可以让扫描结果更加准确。 词袋模型方法是目前一种比较有效的回环检测方法,但使用该算法进行回环检测 时,受限于扫描窗口的尺寸(词袋模型算法需要对每一帧数据进行特征检测,特征点的数量 取决于单帧数据量,而单帧数据量是由扫描窗口尺寸决定的),所以只能在小范围内进行回 环检测(实质是单帧数据间相似度的快速判断),不能在更大的场景范围内进行回环检测, 因此使用该算法进行回环检测时往往不够灵敏,尤其是扫描窗口尺寸远小于被扫描物体尺 寸时。
技术实现要素:
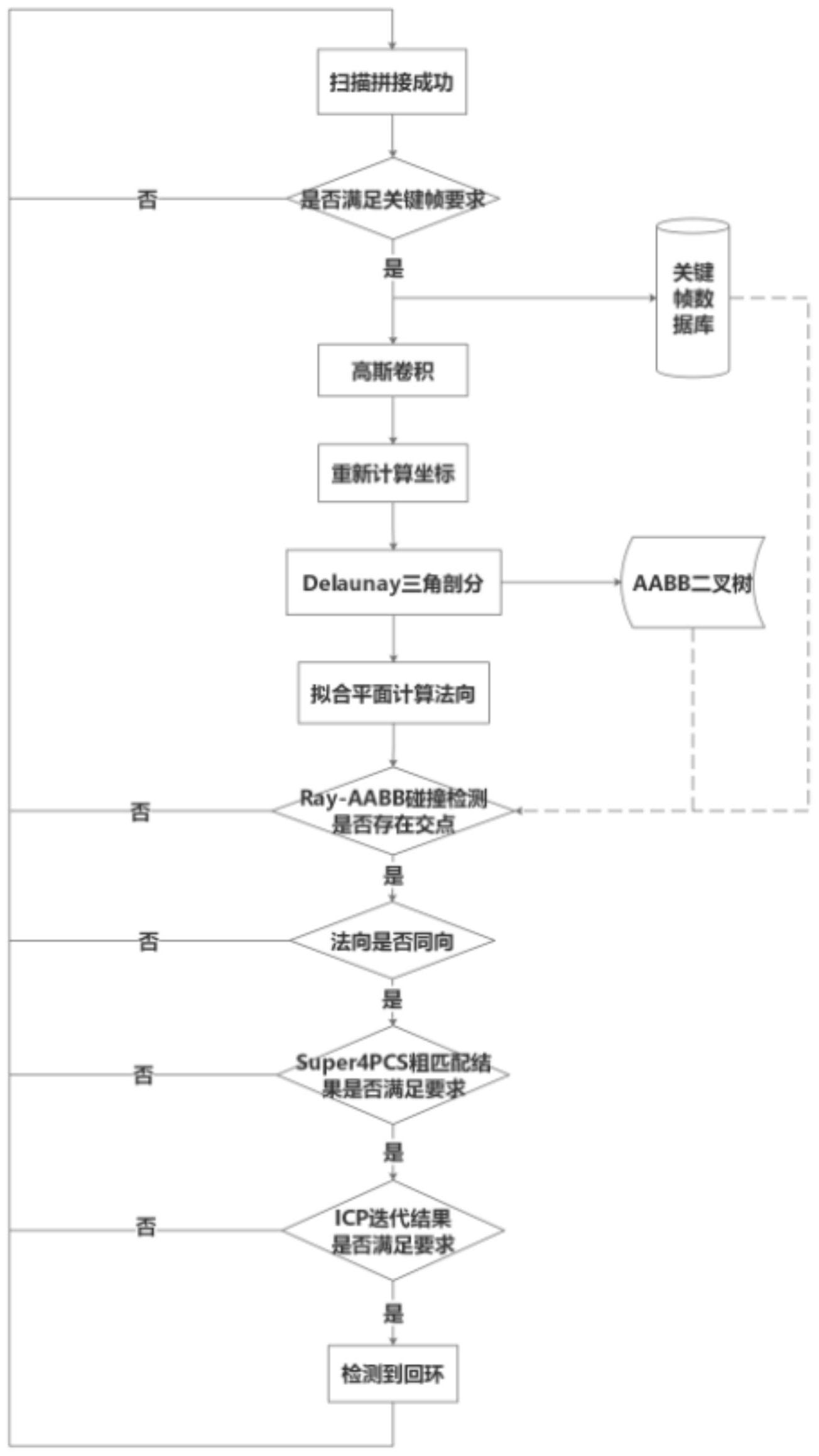
本发明的目的在于针对上述现有技术的不足,提供了一种手持式三维扫描系统的 实时回环检测方法,实现在更大场景范围内进行实时回环检测,大大提高了回环检测的灵 敏度。 为实现上述目的,本发明采用了如下技术方案: 一种手持式三维扫描系统的实时回环检测方法,包括以下步骤: S1、对扫描拼接成功后的每一帧点云P和对应的相机位姿R,其中P={p1 ,p2,..., p N } ;计 算 R 和 上 一 帧 点 云 P '对 应 的 相 机 位 姿 R '之 间 的 变 换 矩阵 O ,其 中 S2、提取O中的三维线性变换部分计算旋转量r,r=arccos(0 .5×(a11 a22 a33- 1));提取O中的三维平移变换部分计算平移量t, S3、当关键帧数据库中的帧数大于帧阈值dmin时,开始进行回环检测; S4、对距当前关键帧为dmin的点云P',通过高斯卷积方法进行融合:取半径为1的权 4 CN 111553975 A 说 明 书 2/4 页 重矩阵 以M为卷积核对点云深度值进行卷积; S5、通过相机成像方程重新计算点云P'中每一个点的坐标; S6、对点云P'通过Delaunay三角算法剖分获得该帧点云的三角化拓扑关系; S7、将点云P '的三角化拓扑关系和每个点的坐标加入AABB(Axis Aligned Bounding Box)二叉树T; S8、通过最小二乘法将点云P'拟合为平面:设平面方程为z=a0x a1y a2,求解方程 组 得到该帧的方向向量V,V=(a0,a1,a2); S9、在D中取距当前帧最近的dmin帧作为检测组,剩余帧作为被检测组。求检测组中 关键帧方向向量的平均值V'; 以检测组时序的中值对应的关键帧点云K作为检测帧,通过Ray-AABB碰撞检测算 法检测以点云K的几何中心Q为起点,V'为方向的射线与T是否存在交点。 进一步,还包括以下步骤: S10、若不存在交点,则说明不存在回环; 若存在交点,计算检测帧K和相交帧K'的法向点乘s,s=a·b; 若s小于0,说明检测帧K和相交帧K'不同向,则不存在回环; 否则分别取检测帧K和相交帧K'邻近的dmin/3帧,通过Super4PCS(Super 4-points Congruent Sets)算法进行粗匹配,匹配结束后计算点云重叠率λ。 进一步,还包括以下步骤: S11、若重叠率λ大于0.5,计算对应点云UV坐标中的xmin,ymin,xmax,ymax,提取UV坐标 处于此范围的点云再次进行ICP(Iterative Closest Point)拼接。 进一步,还包括以下步骤: S12、所述步骤S11循环进行,记录每次拼接的重叠率λ和拼接误差δ; 若重叠率λ和拼接误差δ趋于稳定,并且拼接误差δ满足要求则说明存在回环,随即 中断执行步骤S11并将回环信息发送给回环优化算法用于执行优化。 进一步,所述步骤S1~所述步骤S12随扫描的进行循环执行。 进一步,步骤S2进一步包括: 若所述旋转量r大于旋转阈值rmin或t大于平移阈值tmin,则将该帧点云作为关键帧 点云存入关键帧数据库D;D中的关键帧按加入时间从1开始排序。 本发明的有益效果为:通过为单帧数据添加时序标签,结合多边形求交的原理,实 现在更大场景范围内进行实时回环检测,并且与词袋模型方法联合使用,大大提高了回环 检测的灵敏度。 附图说明 图1为一种手持式三维扫描系统的实时回环检测方法的原理示意图; 5 CN 111553975 A 说 明 书 3/4 页 图2为实施例一的示意图之一; 图3为实施例一的示意图之二。











