
技术摘要:
本申请实施例提供一种摄像头的精度评测方法、装置、系统及电子设备。上述方法包括:获取放置在移动平台的摄像头对应的待评测的目标距离,目标距离为摄像头进行精度评测时与识别对象之间的实际距离;根据目标距离及移动平台的移动偏移量确定移动平台的移动距离;根据移 全部
背景技术:
随着视觉技术的快速发展,对于摄像头的精度要求越来越高,高精度的摄像头通 常可满足用户在不足场景下的拍摄需求。在摄像头出厂前,厂商均需要对摄像头的精度进 行评测、验证,以保证出厂的摄像头精度符合预期。在传统的方式中,通常是评测人员手动 将摄像头放置在设计的位置上,再通过摄像头抓取的图像对摄像头的精度进行评测,操作 复杂繁琐,评测的效率低。
技术实现要素:
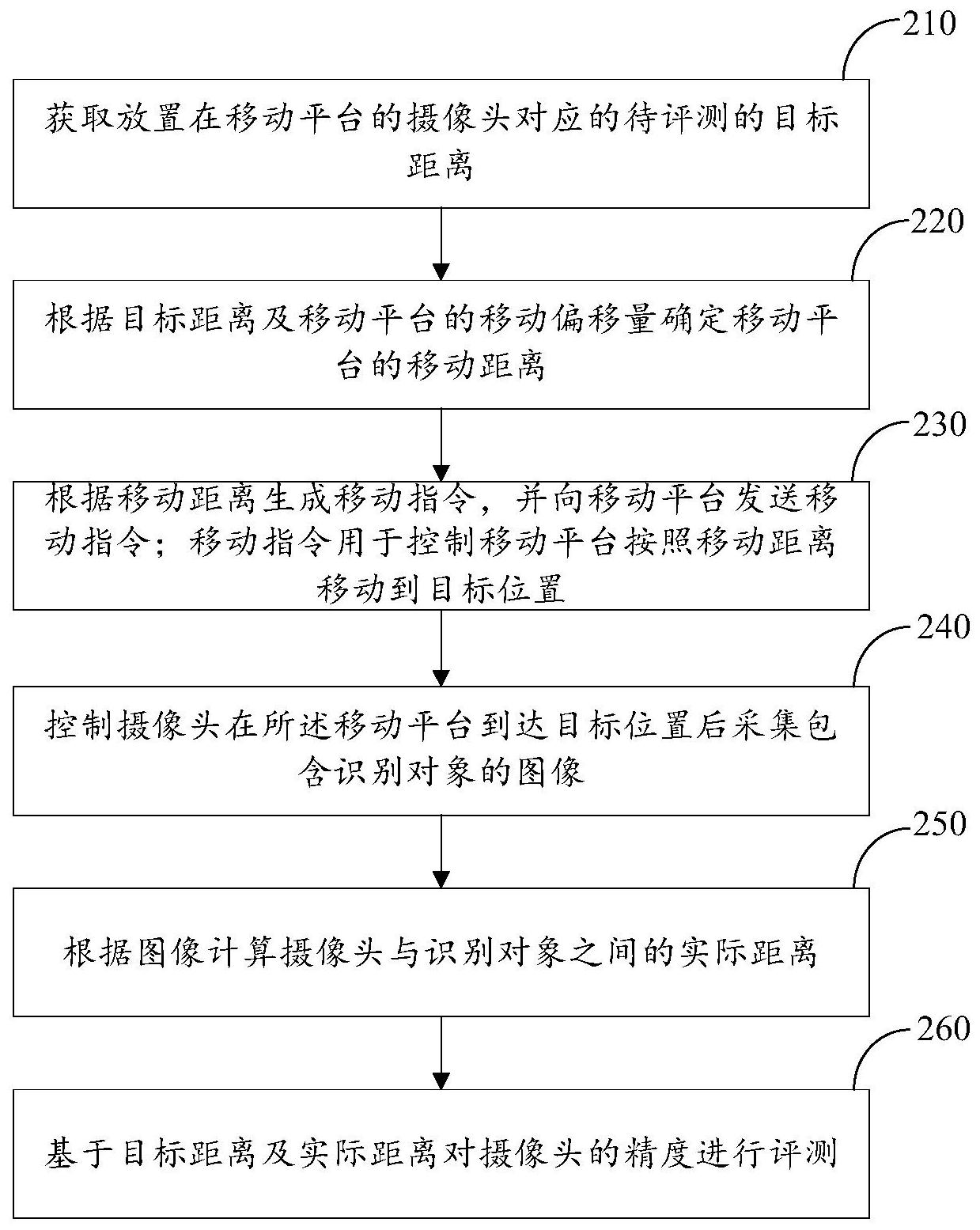
本申请实施例公开了一种摄像头的精度评测方法、装置、系统、电子设备及存储介 质,能够提高摄像头的精度评测效率。 本申请实施例提供一种摄像头的精度评测方法,包括:获取放置在移动平台的摄 像头对应的待评测的目标距离,所述目标距离为所述摄像头进行精度评测时与识别对象之 间的实际距离;根据所述目标距离及所述移动平台的移动偏移量确定所述移动平台的移动 距离;根据所述移动距离生成移动指令,并向所述移动平台发送所述移动指令;所述移动指 令用于控制所述移动平台按照所述移动距离移动到目标位置;控制所述摄像头在所述移动 平台到达所述目标位置后采集包含所述识别对象的图像;根据所述图像计算所述摄像头与 所述识别对象之间的测量距离;基于所述目标距离及测量距离对所述摄像头的精度进行评 测。 上述实施例公开的摄像头的精度评测方法,根据摄像头待评测的目标距离及移动 平台的移动偏移量确定移动平台的移动距离,根据该移动距离生成移动指令,以控制移动 平台按照该移动距离移动到目标位置,由于摄像头放置在移动平台上,在移动平台进行移 动时,摄像头也会随着移动,并在移动平台到达目标位置时控制摄像头采集包含识别对象 的图像,利用该图像计算摄像头与识别对象之间的测量距离,再基于目标距离及测量距离 对摄像头的精度进行评测,可以自动控制摄像头与识别对象之间的距离,简化操作过程,能 够提高精度的评测效率。而且,移动平台的移动距离根据待评测的目标距离及移动偏移量 确定,可以提高精度评测的准确性。 在一个实施例中,在所述获取放置在移动平台的摄像头对应的待评测的目标距离 之前,所述方法还包括:基于预设的第一距离控制移动平台进行移动,所述第一距离为移动 后的移动平台与识别对象之间的理论距离;测量所述移动后的移动平台与所述识别对象之 间真实的第二距离,并计算所述第二距离与第一距离之间的偏移量;根据所述偏移量确定 所述移动平台的移动偏移量。 在本申请实施例中,可在对摄像头进行评测前,可先确定移动平台的移动偏移量, 5 CN 111601101 A 说 明 书 2/19 页 可以提高精度评测的准确性。 在一个实施例中,所述根据所述偏移量确定所述移动平台的移动偏移量;获取多 次基于不同的所述第一距离及对应的第二距离计算得到的偏移量;确定多次计算得到的偏 移量的平均值,并将所述平均值作为所述移动平台的移动偏移量。 在本申请实施例中,可通过多次试验获取移动平台准确的移动偏移量,以保证在 对摄像头进行精度评测时,更加准确地确定移动平台的移动距离,可以进一步提高摄像头 的精度评测的准确性。 在一个实施例中,所述根据所述偏移量确定所述移动平台的移动偏移量,包括:获 取多次基于不同的所述第一距离及对应的第二距离计算得到的偏移量;根据多次计算得到 的偏移量及每个偏移量对应的第二距离建立对应关系,所述对应关系包括所述移动平台的 移动偏移量和所述移动平台与识别对象之间的真实距离的对应关系;在所述根据所述目标 距离及所述移动平台的移动偏移量确定所述移动平台的移动距离之前,所述方法还包括: 根据所述对应关系确定与所述目标距离对应的所述移动平台的移动偏移量。 在本申请实施例中,通过多次计算结果建立移动平台的移动偏移量和移动平台与 识别对象之间的真实距离的对应关系,在对摄像头进行精度评测时,利用该对应关系可准 确获取移动平台的移动偏移量,可以进一步提高摄像头的精度评测的准确性。 在一个实施例中,所述基于预设的第一距离控制移动平台进行移动,包括:基于预 设的第一距离控制移动平台以多个不同的移动速度进行移动;所述根据所述偏移量确定所 述移动平台的移动偏移量,包括:根据各个移动速度对应的偏移量确定所述移动平台在所 述多个不同的移动速度下的移动偏移量。 在本申请实施例中,通过确定移动平台在不同的移动速度下的移动偏移量,能够 明确移动平台的移动偏移与移动速度之间的关系,方便后续对移动平台的速度进行调节。 在一个实施例中,所述根据所述目标距离及所述移动平台的移动偏移量确定所述 移动平台的移动距离,包括:按照绝对值从小到大的顺序对所述移动平台在所述多个不同 的移动速度下的移动偏移量进行排序,并选取绝对值最小的移动偏移量及对应的移动速 度;根据所述目标距离及所述绝对值最小的移动偏移量确定所述移动平台的移动距离;所 述根据所述移动距离生成移动指令,并向所述移动平台发送所述移动指令,包括:根据所述 移动距离及所述绝对值最小的移动偏移量对应的移动速度生成移动指令,并向所述移动平 台发送所述移动指令;所述移动指令用于控制所述移动平台按照所述移动距离及所述绝对 值最小的移动偏移量对应的移动速度移动到目标位置。 在本申请实施例中,可通过调节移动平台的移动速度以降低移动平台的移动偏移 量,能够提高摄像头的精度评测的准确度。 在一个实施例中,在所述获取放置在移动平台的摄像头对应的待评测的目标距离 之前,所述方法还包括:在接收到启动指令时,分别与移动平台及放置在所述移动平台上的 摄像头建立通信连接;获取建立所述通信连接的移动平台的平台标识,以及放置在所述移 动平台的摄像头的设备标识;将所述平台标识与所述设备标识绑定。 在本申请实施例中,通过将平台标识与设备标识进行绑定,控制设备可同时对多 个摄像头进行精度评测,在对移动平台进行控制时,基于绑定的平台标识及设备标识可精 准地实现对多组移动平台及摄像头进行控制,可提高精度评测效率。 6 CN 111601101 A 说 明 书 3/19 页 在一个实施例中,在所述分别与移动平台及放置在所述移动平台上的摄像头建立 通信连接之后,所述方法还包括:确定所述移动平台对应的初始评测距离,所述初始评测距 离为在接收到启动指令时所述移动平台与识别对象之间的实际距离;所述根据所述目标距 离及所述移动平台的移动偏移量确定所述移动平台的移动距离,包括:根据所述初始评测 距离及目标距离计算理论移动距离,所述理论移动距离为所述初始评测距离与所述目标距 离之间的差值;基于所述移动平台的移动偏移量及所述理论移动距离确定所述移动平台的 实际移动距离,其中,若所述移动偏移量为正偏移,则所述实际移动距离为所述理论移动距 离与所述移动偏移量之间的差值,若所述移动偏移量为负偏移,则所述实际移动距离为所 述理论移动距离与所述移动偏移量之和。 在本申请实施例中,通过确定移动平台对应的初始评测距离,再根据该初始评测 距离及待评测的目标距离计算理论移动距离,从而可根据不同的移动偏移量准确得到实际 移动距离,能够提高摄像头精度评测的准确性。 在一个实施例中,所述获取放置在移动平台的摄像头对应的待评测的目标距离, 包括:获取放置在移动平台的摄像头对应的本次待评测的目标距离;在所述基于所述目标 距离及测量距离对所述摄像头的精度进行评测之后,还包括:获取下一待评测的目标距离, 将所述下一待评测的目标距离作为本次待评测的目标距离,并执行所述根据所述目标距离 及所述移动平台的移动偏移量确定所述移动平台的移动距离,直至所有待评测的目标距离 均进行评测。 在本申请实施例中,控制设备可连接多次对摄像头在多个不同的目标距离下的精 度进行评测,提高摄像头精度评测的便利性及评测效率,且提高精度评测的准确性。 本申请实施例提供一种摄像头的精度评测装置,包括:目标距离获取模块,用于获 取放置在移动平台的摄像头对应的待评测的目标距离,所述目标距离为所述摄像头进行精 度评测时与识别对象之间的实际距离;移动距离确定模块,用于根据所述目标距离及所述 移动平台的移动偏移量确定所述移动平台的移动距离;指令发送模块,用于根据所述移动 距离生成移动指令,并向所述移动平台发送所述移动指令;所述移动指令用于控制所述移 动平台按照所述移动距离移动到目标位置;图像采集模块,用于控制所述摄像头在所述移 动平台到达所述目标位置后采集包含所述识别对象的图像;测量距离计算模块,用于根据 所述图像计算所述摄像头与所述识别对象之间的测量距离;评测模块,用于基于所述目标 距离及测量距离对所述摄像头的精度进行评测。 本申请实施例提供一种摄像头的精度评测系统,包括控制设备、移动平台及放置 在所述移动平台上的摄像头,所述控制设备与所述移动平台建立第一通信连接,所述控制 设备与所述摄像头建立第二通信连接;所述控制设备用于获取所述摄像头对应的待评测的 目标距离,所述目标距离为所述摄像头进行精度评测时与识别对象之间的实际距离,根据 所述目标距离及所述移动平台的移动偏移量确定所述移动平台的移动距离,然后根据所述 移动距离生成移动指令,并通过所述第一通信连接向所述移动平台发送所述移动指令;所 述移动平台用于接收所述控制设备发送的所述移动指令,并根据所述移动指令按照所述移 动距离移动到目标位置;所述控制设备还用于在所述移动平台到达所述目标位置后,通过 所述第二通信连接向所述摄像头发送采集指令;所述摄像头用于接收所述控制设备发送的 采集指令,并根据所述采集指令采集包含所述识别对象的图像,再将采集的图像通过所述 7 CN 111601101 A 说 明 书 4/19 页 第二通信连接传输至所述控制设备;所述控制设备还用于获取所述摄像头采集的图像,并 根据所述图像计算所述摄像头与所述识别对象之间的测量距离,基于所述目标距离及测量 距离对所述摄像头的精度进行评测。 本申请实施例提供一种电子设备,包括存储器及处理器,所述存储器中存储有计 算机程序,所述计算机程序被所述处理器执行时,使得所述处理器实现如上所述的方法。 本申请实施例提供一种计算机可读存储介质,其上存储有计算机程序,所述计算 机程序被处理器执行时实现如上所述的方法。 上述实施例公开的摄像头的精度评测装置、系统、电子设备及存储介质,根据摄像 头待评测的目标距离及移动平台的移动偏移量确定移动平台的移动距离,根据该移动距离 生成移动指令,以控制移动平台按照该移动距离移动到目标位置,由于摄像头放置在移动 平台上,在移动平台进行移动时,摄像头也会随着移动,并在移动平台到达目标位置时控制 摄像头采集包含识别对象的图像,利用该图像计算摄像头与识别对象之间的测量距离,再 基于目标距离及测量距离对摄像头的精度进行评测,可以自动控制摄像头与识别对象之间 的距离,简化操作过程,能够提高精度的评测效率。而且,移动平台的移动距离根据待评测 的目标距离及移动偏移量确定,可以提高精度评测的准确性。 附图说明 为了更清楚地说明本申请实施例中的技术方案,下面将对实施例中所需要使用的 附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于本领 域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附 图。 图1为一个实施例中摄像头的精度评测方法的应用场景图; 图2为一个实施例中摄像头的精度评测方法的流程图; 图3为另一个实施例中摄像头的精度评测方法的流程图; 图4为另一个实施例中摄像头的精度评测方法的流程图; 图5为一个实施例中摄像头的精度评测系统的系统架构图; 图6为一个实施例中摄像头的精度评测装置的框图; 图7为一个实施例中电子设备的结构框图。











