
技术摘要:
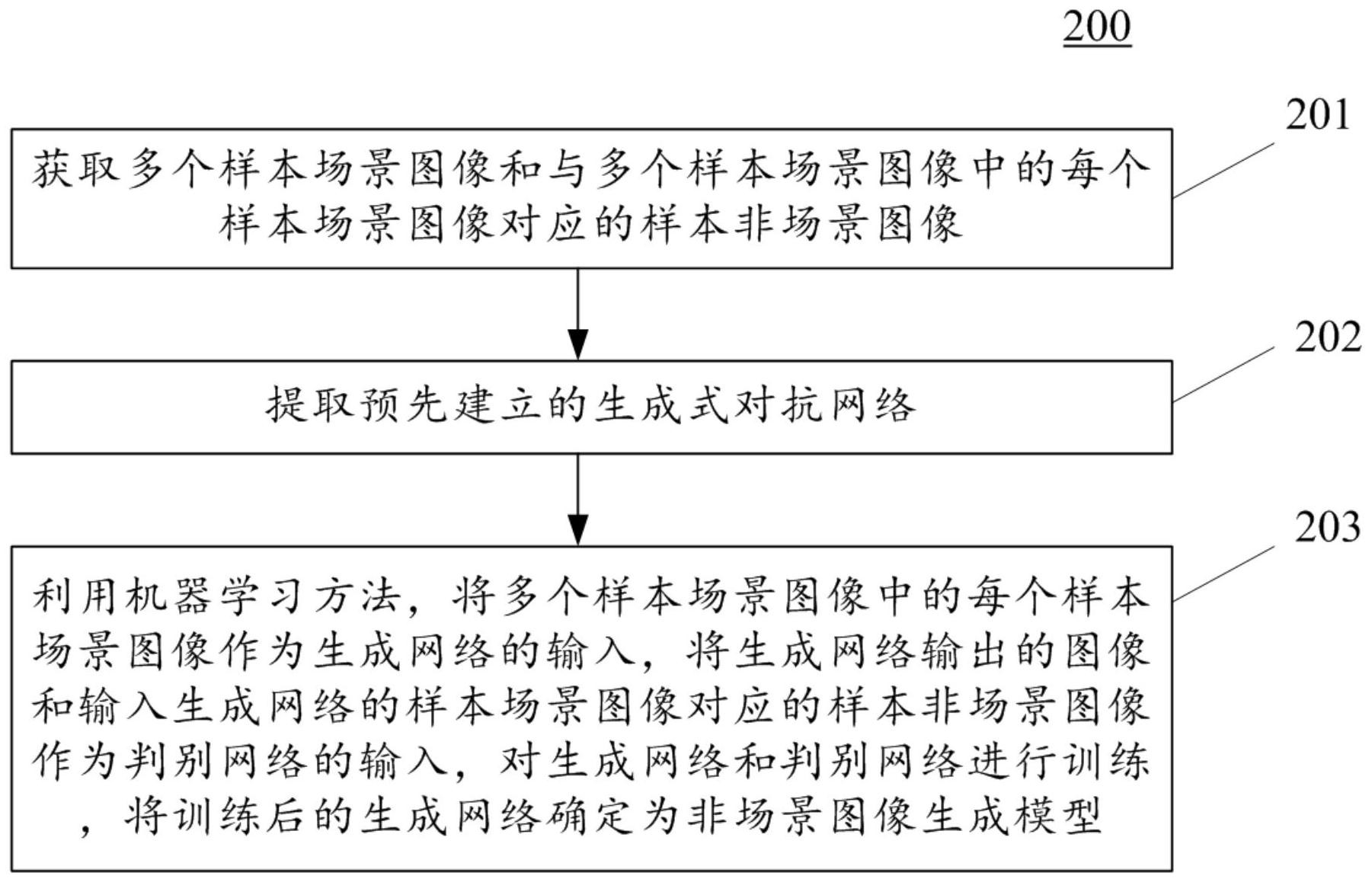
本公开的实施例公开了用于生成模型的方法及装置。该方法的一具体实施方式包括:获取多个样本场景图像和与上述多个样本场景图像中的每个样本场景图像对应的样本非场景图像;提取预先建立的生成式对抗网络;利用机器学习方法,将上述多个样本场景图像中的每个样本场景图 全部
背景技术:
包括:获取 多个样本场景图像和与上述多个样本场景图像 中的每个样本场景图像对应的样本非场景图像; 提取预先建立的生成式对抗网络;利用机器学习 方法,将上述多个样本场景图像中的每个样本场 景图像作为生成网络的输入,将生成网络输出的 图像和输入生成网络的样本场景图像对应的样 本非场景图像作为判别网络的输入,对生成网络 和判别网络进行训练,将训练后的生成网络确定 为非场景图像生成模型。该实施方式提高了在跨 场景下目标物体的识别准确性。 CN 111553283 A CN 111553283 A 权 利 要 求 书 1/3 页 1.一种用于生成模型的方法,包括: 获取多个样本场景图像和与所述多个样本场景图像中的每个样本场景图像对应的样 本非场景图像,其中,所述样本场景图像和样本非场景图像包含相同目标物体的物体图像; 提取预先建立的生成式对抗网络,其中,所述生成式对抗网络包括生成网络和判别网 络,生成网络用于利用所输入的场景图像生成非场景图像,判别网络用于确定输入所述判 别网络的图像是否是生成网络输出的图像; 利用机器学习方法,将所述多个样本场景图像中的每个样本场景图像作为生成网络的 输入,将生成网络输出的图像和输入生成网络的样本场景图像对应的样本非场景图像作为 判别网络的输入,对生成网络和判别网络进行训练,将训练后的生成网络确定为非场景图 像生成模型。 2.根据权利要求1所述的方法,其中,所述样本场景图像通过以下步骤采集: 确定样本图像中的至少一个目标物体; 对于所述至少一个目标物体中的目标物体,获取该目标物体在至少一个场景中的每个 场景的至少一个样本场景图像。 3.根据权利要求1所述的方法,其中,所述对生成网络和判别网络进行训练,将训练后 的生成网络确定为非场景图像生成模型,包括: 执行如下训练步骤:固定生成网络的参数,将所述多个样本场景图像中的每个样本场 景图像作为生成网络的输入,将生成网络输出的图像和输入生成网络的样本场景图像对应 的样本非场景图像作为判别网络的输入,利用机器学习方法对判别网络进行训练;固定训 练后的判别网络的参数,将所述多个样本场景图像中的每个样本场景图像作为生成网络的 输入,利用机器学习方法、交叉熵损失函数和三元组损失函数对生成网络进行训练;确定训 练后的判别网络输出的判别结果的准确率,响应于确定准确率处于预设数值范围内,将最 近一次训练的生成网络确定为非场景图像生成模型。 4.根据权利要求3所述的方法,其中,所述对生成网络和判别网络进行训练,将训练后 的生成网络确定为非场景图像生成模型,还包括: 响应于确定准确率处于预设数值范围外,使用最近一次训练的生成网络和判别网络重 新执行所述训练步骤。 5.根据权利要求1所述的方法,其中,对于所述多个样本场景图像中的每个样本场景图 像,该样本场景图像包含的物体图像特征至少部分的与该样本场景图像对应的样本非场景 图像包含的物体图像特征相同。 6.根据权利要求1至5任意一项所述的方法,其中,所述方法还包括: 获取基准目标物体图像和待处理场景图像; 查询所述基准目标物体图像的基准场景图像; 将所述基准场景图像输入至所述非场景图像生成模型,得到对应所述基准场景图像的 至少一个非场景图像; 响应于所述至少一个非场景图像中存在与所述待处理场景图像对应的目标非场景图 像,获取所述目标非场景图像中对应所述基准目标物体图像的目标特征信息; 根据所述目标特征信息从所述待处理场景图像中识别出目标物体图像。 7.一种用于生成模型的装置,包括: 2 CN 111553283 A 权 利 要 求 书 2/3 页 样本图像获取单元,被配置成获取多个样本场景图像和与所述多个样本场景图像中的 每个样本场景图像对应的样本非场景图像,其中,所述样本场景图像和样本非场景图像包 含相同目标物体的物体图像; 提取单元,被配置成提取预先建立的生成式对抗网络,其中,所述生成式对抗网络包括 生成网络和判别网络,生成网络用于利用所输入的场景图像生成非场景图像,判别网络用 于确定输入所述判别网络的图像是否是生成网络输出的图像; 模型生成单元,被配置成利用机器学习方法,将所述多个样本场景图像中的每个样本 场景图像作为生成网络的输入,将生成网络输出的图像和输入生成网络的样本场景图像对 应的样本非场景图像作为判别网络的输入,对生成网络和判别网络进行训练,将训练后的 生成网络确定为非场景图像生成模型。 8.根据权利要求7所述的装置,其中,所述装置包括样本确定单元,被配置成确定样本 场景图像,所述样本确定单元包括: 目标物体确定子单元,被配置成确定样本图像中的至少一个目标物体; 样本场景图像确定子单元,对于所述至少一个目标物体中的目标物体,被配置成获取 该目标物体在至少一个场景中的每个场景的至少一个样本场景图像。 9.根据权利要求7所述的装置,其中,所述模型生成单元包括: 模型训练子单元,被配置成固定生成网络的参数,将所述多个样本场景图像中的每个 样本场景图像作为生成网络的输入,将生成网络输出的图像和输入生成网络的样本场景图 像对应的样本非场景图像作为判别网络的输入,利用机器学习方法对判别网络进行训练; 固定训练后的判别网络的参数,将所述多个样本场景图像中的每个样本场景图像作为生成 网络的输入,利用机器学习方法、交叉熵损失函数和三元组损失函数对生成网络进行训练; 确定训练后的判别网络输出的判别结果的准确率,响应于确定准确率处于预设数值范围 内,将最近一次训练的生成网络确定为非场景图像生成模型。 10.根据权利要求9所述的装置,其中,所述模型生成单元还包括: 模型确定子单元,响应于确定准确率处于预设数值范围外,被配置成使用最近一次训 练的生成网络和判别网络重新执行所述训练步骤。 11.根据权利要求7所述的装置,其中,对于所述多个样本场景图像中的每个样本场景 图像,该样本场景图像包含的物体图像特征至少部分的与该样本场景图像对应的样本非场 景图像包含的物体图像特征相同。 12.根据权利要求7至11任意一项所述的装置,其中,所述装置还包括: 图像获取单元,被配置成获取基准目标物体图像和待处理场景图像; 基准场景图像查询单元,被配置成查询所述基准目标物体图像的基准场景图像; 非场景图像生成单元,被配置成将所述基准场景图像输入至所述非场景图像生成模 型,得到对应所述基准场景图像的至少一个非场景图像; 目标特征信息获取单元,响应于所述至少一个非场景图像中存在与所述待处理场景图 像对应的目标非场景图像,被配置成获取所述目标非场景图像中对应所述基准目标物体图 像的目标特征信息; 识别单元,被配置成根据所述目标特征信息从所述待处理场景图像中识别出目标物体 图像。 3 CN 111553283 A 权 利 要 求 书 3/3 页 13.一种电子设备,包括: 一个或多个处理器; 存储器,其上存储有一个或多个程序, 当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器 执行权利要求1至6中任一所述的方法。 14.一种计算机可读介质,其上存储有计算机程序,其特征在于,该程序被处理器执行 时实现如权利要求1至6中任一所述的方法。 4 CN 111553283 A 说 明 书 1/10 页 用于生成模型的方法及装置 技术领域 本公开的实施例涉及图像处理技术领域,具体涉及用于生成模型的方法及装置。
技术实现要素:
目标识别是指一个特殊目标物体(或一种类型的目标物体)从其它目标物体(或其 它类型的目标)中被区分出来的过程。目标物体可以是车辆、行人等。











