
技术摘要:
本发明公开了一种可爬楼的地板清洁机器人,包括支撑板,支撑板上固接喷水器、集尘盒和烘干器;支撑板下通过旋转升降台固接左横梁、拖布板、吸尘板和右横梁,左横梁和右横梁通过避震器固接驱动箱;驱动箱设有滑槽、电机座、电机及电动推杆;电机轴连接主动齿轮,主动齿 全部
背景技术:
近年来,随着计算机和人工智能技术的飞速发展,智能机器人领域逐渐成为现代 机器人研究领域的热点。其中,服务类机器人开辟了机器人应用新领域。服务机器人的出现 主要有三大原因:一是劳动力成本上升;二是人类想摆脱枯燥的劳动力,如清洁、家务、照顾 病人等;三是人口的老龄和社会福利制度的完善也为服务类机器人提供了广泛的市场应用 前景。 目前市场上的地面清洁机器人多以移动式为主,体型虽说轻便,但实用性能不高, 而且不能越障爬楼,因此研发一种集自动爬楼、吸尘、拖地、烘干为一体的智能地板清洁机 器人,对提高地板清洁效率,节约清洁成本,有至关重要的意义。
技术实现要素:
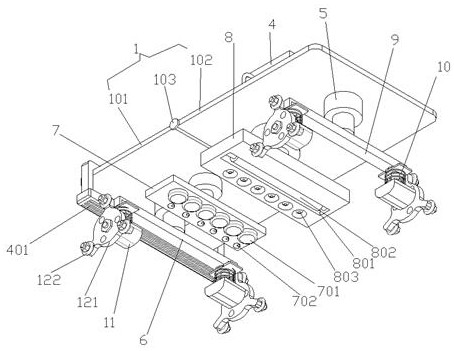
本发明的目的是为了解决现有技术中存在的缺点,而提出的一种可爬楼的地板清 洁机器人。 为了实现上述目的,本发明采用了如下技术方案: 一种可爬楼的地板清洁机器人,包括支撑板,支撑板具体是由左支撑板和右支撑板通 过铰链连接扣铰接而成的合页板形状,铰链连接扣具体是75°特殊铰链,左支撑板的上表面 固接有烘干器,右支撑板的上表面固接有集尘盒和喷水器; 支撑板的下表面自左向右依次设置有一组烘干管道和四组旋转升降台,烘干管道具体 是由一组回字形管道套接在左支撑板上并经焊接固定,烘干管道的顶部通过气管与烘干器 相连通,烘干管道的底部开设有百叶状风口,烘干管道的出风口朝向地面; 自左向右的四组旋转升降台底部分别依次固接有左横梁、拖布板、吸尘板和右横梁,最 左侧旋转升降台的底部固定安装在左横梁的中心位置,左横梁的两端分别通过避震器固接 有驱动箱; 驱动箱内的底壁设有滑槽,滑槽内滑动连接有电机座,电机座的上表面固接有电机,电 机的一侧设有电机轴,电机远离电机轴的一侧固接有电动推杆,电动推杆的基座固定在驱 动箱的内侧壁上,电机轴伸出驱动箱外且连接有滚轮组件; 滚轮组件包括类三角齿轮壳及设置在类三角齿轮壳上的小滚轮,电机轴活动穿插在类 三角齿轮壳的中心位置,电机轴伸入类三角齿轮壳内的部分通过平键固定套接有主动齿 轮,类三角齿轮壳靠近驱动箱一侧的内壁上固定设有与主动齿轮配合的齿轮圈,类三角齿 轮壳远离驱动箱一侧的内壁上通过销轴套接有与主动齿轮配合的从动齿轮,从动齿轮的一 侧设有微皮带圈一,小滚轮通过活动轴穿接在类三角齿轮壳上,活动轴也套接有微皮带圈 二,微皮带圈一和微皮带圈二通过皮带连接,电机轴伸出类三角齿轮壳外的末端设有封端 螺母,从动齿轮和齿轮圈的齿间距均为单齿宽的3-5倍,主动齿轮传动后产生减速作用,便 4 CN 111568320 A 说 明 书 2/5 页 于主动齿轮自齿轮圈上顺利摆脱出来,并接着与从动齿轮顺利啮合,反之亦然;小滚轮的轮 辋面位于类三角齿轮壳的边框外,使类三角齿轮壳始终不与地面或楼梯接触; 右横梁的两端也分别设有一组避震器、驱动箱和滚轮组件; 拖布板上表面的中心位置与其对应的旋转升降台底端固接,拖布板的下表面设有多组 旋转刷洗头和多组喷头,喷头通过水管与喷水器连通,喷头管口朝向对应的旋转刷洗头,旋 转刷洗头具体为圆柱块状,旋转刷洗头上表面圆心通过销轴固接在拖布板下,旋转刷洗头 外套有清洁布套; 吸尘板上表面一条边的中心位置与其对应的旋转升降台底端固接,吸尘板下表面的中 部开设有矩形的吸尘槽,吸尘槽的顶面通过管道与吸尘器相连通,吸尘器另一端的排气口 通过管道与集尘盒相连通,与吸尘板固接的旋转升降台顶部的固定座通过螺栓与吸尘器的 外壳固接,吸尘槽内通过销轴架设有旋转辊刷,旋转辊刷的底部有部分弧面伸出吸尘板下 表面的下方位置,吸尘板下表面还设有多组喷水凹槽,喷水凹槽内嵌入有高压喷雾头,高压 喷雾头通过水管与喷水器相连通。 进一步地,旋转升降台具体是SWL型电动丝杆升降机,其顶部的固定座通过螺丝安 装在支撑板的下表面,其底部通过法兰安装在左横梁、拖布板、吸尘板或右横梁的中心位 置。 进一步地,类三角齿轮壳的两侧面和驱动箱的一侧面均设有与电机轴活动套接的 光滑轴孔,光滑轴孔的内壁涂抹有润滑油。便于电机轴沿轴向平移,从而使主动齿轮自齿轮 圈上顺利摆脱出来,并接着与从动齿轮顺利啮合,反之亦然。 进一步地,喷水器具体是由一个水箱和多组格兰富微型水泵组成,烘干器具体是 由一个空气加热器及多组热风泵组成,吸尘器具体是Dibea04008 pro旋风吸力机, 本发明还提出一种清洁机器人的控制系统,采用前述的一种可爬楼的地板清洁机器 人,支撑板的上表面还固定设有控制盒,控制盒设有控制芯片、传感器、遥控信号接发装置 及可充电源,控制芯片设有分别与旋转升降台、电机、电动推杆、喷水器、烘干器、吸尘器、传 感器及可充电源电性连接的脚线;可充电源具体是BQ24773充电芯片并配置电源管理模块, 传感器具体是OPT3101霍尔传感器。 与现有技术相比,本发明的有益效果是: 1.本发明的整体结构具有柔性,铰链连接扣具体是75°特殊铰链,便于爬楼作业时,前 轮爬楼,支撑板从中弯折,随后后轮再上楼,上楼过程中,拖洗、烘干及吸尘的各个机构均可 多楼梯的水平板和竖直板均可接触,实现对楼梯或不平地面的较全面清洁过程; 2.本发明的柔性结构配合旋转升降台,从而调整各滚轮组件、拖布板及吸尘板的高度, 如果再配上现有技术中的记忆模块,即可完成常规清洁路线的升降调整方案,从而使滚轮 组件、旋转刷洗头及旋转辊刷始终着地,适宜不平路线的清洁处理; 3、本发明通过控制电机及电动推杆,实现主动齿轮的离合作用,调整滚轮组件的运动 方式,使其适应于平地作业和攀爬作业; 4、本发明将喷水器、烘干器及吸尘器集成于一体,实现拖洗-烘干-清扫吸尘的清洁作 业流程,可适用于不同整洁度的、不同湿度的地面,使用范围广。 5 CN 111568320 A 说 明 书 3/5 页 附图说明 图1为本发明提出的一种可爬楼的地板清洁机器人的外观立体图; 图2为本发明提出的一种可爬楼的地板清洁机器人的侧视图; 图3为本发明提出的一种可爬楼的地板清洁机器人的后视图; 图4为本发明提出的一种可爬楼的地板清洁机器人的仰视图; 图5为本发明提出的一种可爬楼的地板清洁机器人的齿轮传动结构图; 图6为本发明提出的一种可爬楼的地板清洁机器人的滚轮组件的内部结构图; 图中:支撑板1、左支撑板101、右支撑板102、铰链连接扣103、喷水器2、集尘盒3、烘干器 4、烘干管道401、旋转升降台5、左横梁6、拖布板7、旋转刷洗头701、喷头702、吸尘板8、吸尘 槽801、旋转辊刷802、高压喷雾头803、右横梁9、避震器10、驱动箱11、滑槽111、电机座112、 电机113、电机轴114、电动推杆115、滚轮组件12、类三角齿轮壳121、小滚轮122、主动齿轮 123、齿轮圈124、从动齿轮125、微皮带圈一126、活动轴127、微皮带圈二128、吸尘器13、控制 盒14。











