
技术摘要:
本申请涉及一种电机控制方法、装置、电子设备及存储介质,适用于新能源动力汽车驱动的电机。该方法基于获取的位置信号确定电机转子的当前位置角和当前转速;根据当前位置角和当前转速确定当前目标位置角集合;当前目标位置角集合包括当前磁场定向控制周期内的多个目标 全部
背景技术:
随着电力电子技术及微处理器技术的发展,永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)及其矢量控制在国防、制造业及工业等领域得到了广泛的应用。 电机位置信号是永磁同步电机矢量控制的一个重要信息。电机位置传感器比较常用的如旋 转变压器,其输出的信号是高频的带有载波的正余弦信号,这种输出信号经过解调后得到 正交的正余弦信号,从这种信号中求解出满足精度要求的电机位置角成为了永磁同步电机 控制开发的关键问题。 电机控制器采集位置和相电流等输入信号,然后进行磁场定向控制(Field Oriented Control,FOC),以及空间矢量脉宽调制(Space Vector Pulse Width Modulation,SVPWM),所有这些都需要占用控制器的计算资源,如果控制器的CPU负载率过 高,就会导致系统紊乱,输出不受控的力矩,从而导致车辆和电机的损坏。
技术实现要素:
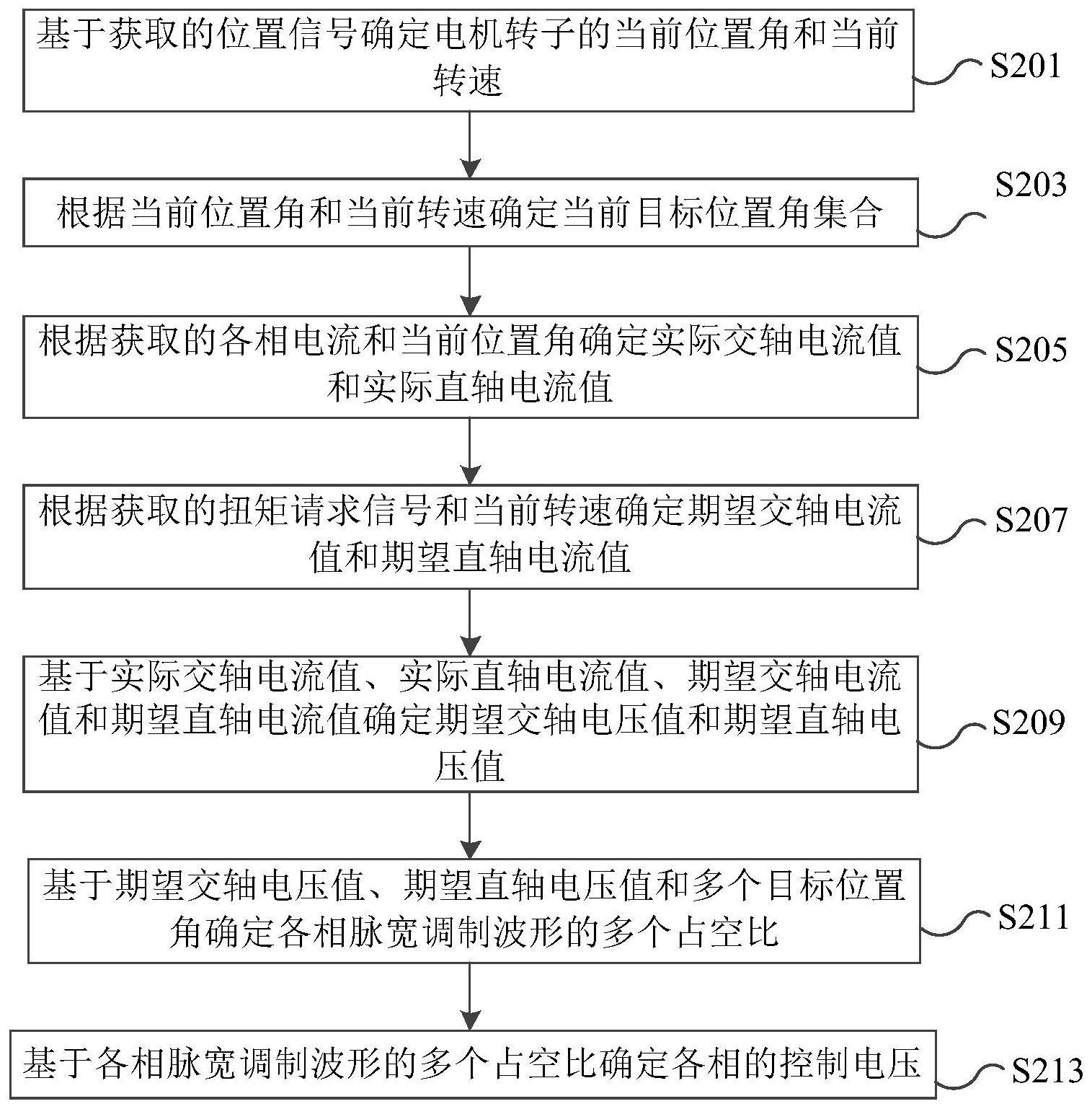
本申请实施例提供了一种电机控制方法、装置、电子设备及存储介质,适用于新能 源动力汽车驱动的电机,可以优化电机控制器CPU的负载率,从而使得电机运行更加稳定可 靠。 一方面,本申请实施例提供了一种电机控制方法,包括: 基于获取的位置信号确定电机转子的当前位置角和当前转速; 根据当前位置角和当前转速确定当前目标位置角集合;当前目标位置角集合包括 当前磁场定向控制周期内的多个目标位置角;多个目标位置角包括当前位置角; 根据获取的各相电流和当前位置角确定实际交轴电流值和实际直轴电流值; 根据获取的扭矩请求信号和当前转速确定期望交轴电流值和期望直轴电流值; 基于实际交轴电流值、实际直轴电流值、期望交轴电流值和期望直轴电流值确定 期望交轴电压值和期望直轴电压值; 基于期望交轴电压值、期望直轴电压值和多个目标位置角确定各相脉宽调制波形 的多个占空比;多个目标位置角和多个占空比一一对应; 基于各相脉宽调制波形的多个占空比确定各相的控制电压。 另一方面,本申请实施例提供了一种电机控制装置,包括: 第一确定模块,用于基于获取的位置信号确定电机转子的当前位置角和当前转 速; 第二确定模块,用于根据当前位置角和当前转速确定当前目标位置角集合;当前 目标位置角集合包括当前磁场定向控制周期内的多个目标位置角;多个目标位置角包括当 4 CN 111555669 A 说 明 书 2/9 页 前位置角; 第三确定模块,用于根据获取的各相电流和当前位置角确定实际交轴电流值和实 际直轴电流值; 第四确定模块,用于根据获取的扭矩请求信号和当前转速确定期望交轴电流值和 期望直轴电流值; 第五确定模块,用于基于实际交轴电流值、实际直轴电流值、期望交轴电流值和期 望直轴电流值确定期望交轴电压值和期望直轴电压值; 第六确定模块,用于基于期望交轴电压值、期望直轴电压值和多个目标位置角确 定各相脉宽调制波形的多个占空比;多个目标位置角和多个占空比一一对应; 第七确定模块,用于基于各相脉宽调制波形的多个占空比确定各相的控制电压。 另一方面,本申请实施例提供了一种电子设备,电子设备包括处理器和存储器,存 储器中存储有至少一条指令或至少一段程序,至少一条指令或至少一段程序由处理器加载 并执行上述的电机控制方法。 另一方面,本申请实施例提供了一种计算机存储介质,存储介质中存储有至少一 条指令或至少一段程序,至少一条指令或至少一段程序由处理器加载并执行以实现上述的 电机控制方法。 本申请实施例提供的一种电机控制方法、装置、电子设备及存储介质具有如下有 益效果: 通过基于获取的位置信号确定电机转子的当前位置角和当前转速;根据当前位置 角和当前转速确定当前目标位置角集合;当前目标位置角集合包括当前磁场定向控制周期 内的多个目标位置角;多个目标位置角包括当前位置角;根据获取的各相电流和当前位置 角确定实际交轴电流值和实际直轴电流值;根据获取的扭矩请求信号和当前转速确定期望 交轴电流值和期望直轴电流值;基于实际交轴电流值、实际直轴电流值、期望交轴电流值和 期望直轴电流值确定期望交轴电压值和期望直轴电压值;基于期望交轴电压值、期望直轴 电压值和多个目标位置角确定各相脉宽调制波形的多个占空比;多个目标位置角和多个占 空比一一对应;基于各相脉宽调制波形的多个占空比确定各相的控制电压。本申请通过确 定当前磁场定向控制周期内的多个目标位置角,同时基于期望交轴电压值和期望直轴电压 值确定出各相脉宽调制波形的多个占空比,如此,可以优化电机控制器CPU的负载率,从而 使得电机运行更加稳定可靠。 附图说明 为了更清楚地说明本申请实施例中的技术方案,下面将对实施例描述中所需要使 用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于 本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他 的附图。 图1是本申请实施例提供的一种应用场景的示意图; 图2是本申请实施例提供的一种电机方法的流程示意图; 图3是本申请实施例提供的一种电机控制原理图; 图4是本申请实施例提供的一种基于输出信号求解电机位置角的示意图; 5 CN 111555669 A 说 明 书 3/9 页 图5是本申请实施例提供的一种正交的正余弦信号的示意图; 图6是本申请实施例提供的一种当前目标位置角集合的示意图; 图7是本申请实施例提供的一种电机控制装置的结构示意图。











