
技术摘要:
本发明公开了一种用于拉索桥探伤的爬壁机器人,包括八棱柱形外框、自动夹紧装置及自动攀爬装置,所述八棱柱形外框上固定设置摄像头,所述自动夹紧装置设置在八棱柱形外框上,所述八棱柱形外框及自动夹紧装置上分别设有连杆装置,并通过自动夹紧装置上的连杆装置与自动 全部
背景技术:
随着拉索桥的普及,拉索桥拉索的检修越来越受到人们的关注。目前的检修方法 主要是通过笼式或者吊绳式的方法将工人悬吊至高空来检修,这种方法危险系数高,检修 效率低,工人的工作量大。本申请拟设计一款爬杆装置,能携带摄像头等检测设备,代替工 人进行高空作业。
技术实现要素:
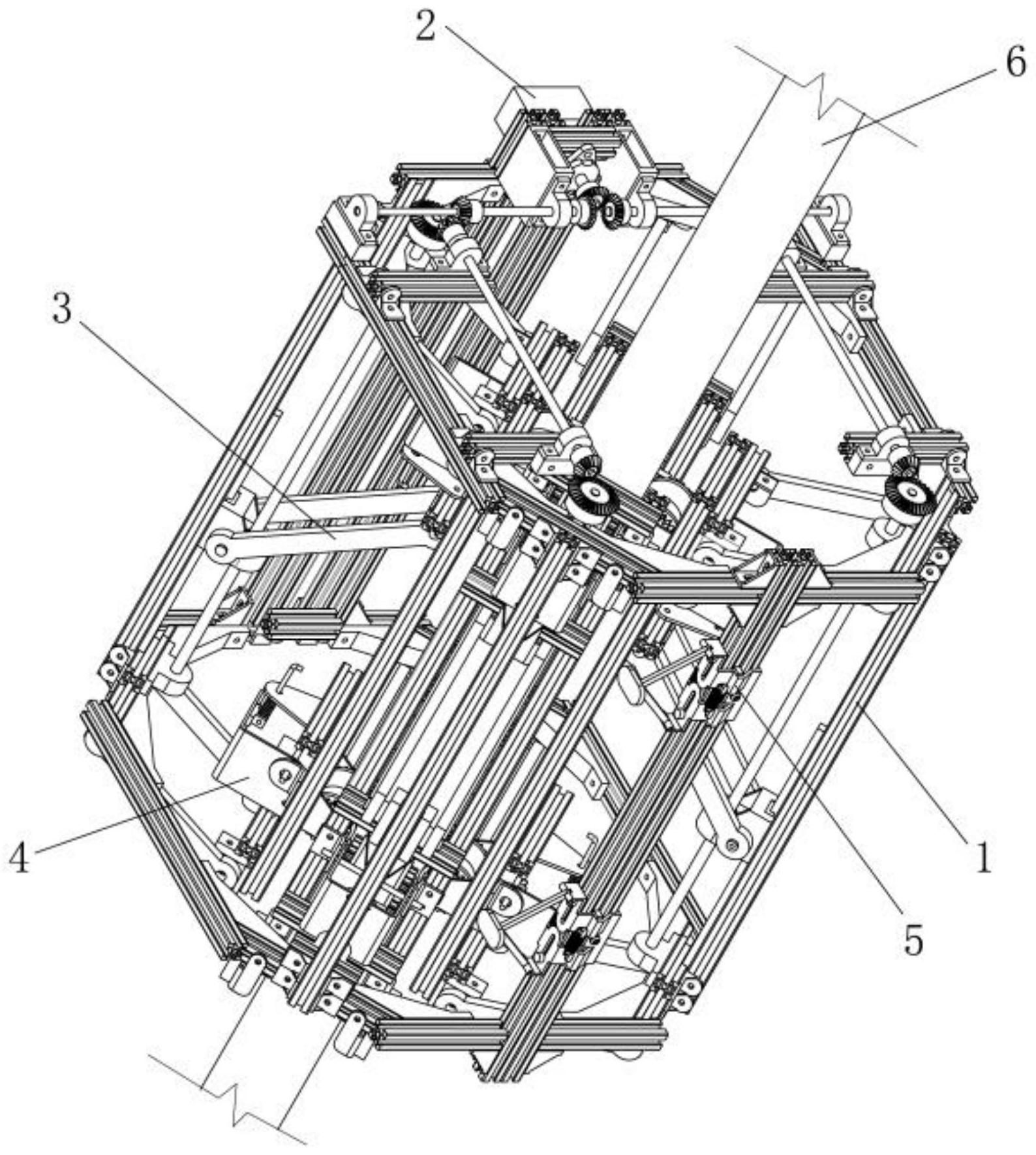
针对现有技术中存在的问题,本发明提供了结构设计合理的一种用于拉索桥探伤 的爬壁机器人。 本发明的技术方案如下: 一种用于拉索桥探伤的爬壁机器人,其特征在于,包括八棱柱形外框、自动夹紧装置及 自动攀爬装置,所述八棱柱形外框上固定设置摄像头,所述自动夹紧装置设置在八棱柱形 外框上,所述八棱柱形外框及自动夹紧装置上分别设有连杆装置,并通过自动夹紧装置上 的连杆装置与自动攀爬装置相连,从而将自动攀爬装置夹紧在拉索桥的铁索上。 所述的一种用于拉索桥探伤的爬壁机器人,其特征在于,所述八棱柱形外框包括 左半外框、右半外框及中间外框,所述左半外框及右半外框的一端分别与中间外框的两端 活动连接,所述左半外框及右半外框的另一端通过弹簧锁固定连接。 所述的一种用于拉索桥探伤的爬壁机器人,其特征在于,所述自动夹紧装置包括 夹紧电机,所述夹紧电机的轴上设有1号锥齿轮,所述1号锥齿轮两侧设有2号锥齿轮及3号 锥齿轮,所述3号锥齿轮通过齿轮轴与5号锥齿轮相连,所述5号锥齿轮上啮合设置7号锥齿 轮,所述7号锥齿轮上啮合设置9号锥齿轮,所述9号锥齿轮通过齿轮轴与11号锥齿轮相连, 所述11号锥齿轮上啮合设置13号锥齿轮,所述2号锥齿轮通过齿轮轴与4号锥齿轮相连,所 述4号锥齿轮上啮合设置6号锥齿轮,所述6号锥齿轮上啮合设置8号锥齿轮,所述8号锥齿轮 通过齿轮轴与10号锥齿轮相连,所述10号锥齿轮上啮合设置12号锥齿轮,所述6号锥齿轮、7 号锥齿轮、12号锥齿轮及13号锥齿轮上分别设有丝杆,所述丝杆上设有丝杆螺母,所述丝杆 螺母上固定设置滑块,所述八棱柱形外框上在与滑块对应位置处设有导轨。 所述的一种用于拉索桥探伤的爬壁机器人,其特征在于,所述自动攀爬装置包括 外框架及活动设置在外框架两端的驱动装置,所述驱动装置包括外壳、驱动电机及驱动轮, 所述驱动电机设置在外壳内,所述驱动电机与驱动轮通过齿轮传动连接。 所述的一种用于拉索桥探伤的爬壁机器人,其特征在于,所述连杆装置包括两根 平行设置的连杆,所述八棱柱形外框的上下部位置处分别设有连杆装置,并通过连杆装置 通过连杆将外框架安装在八棱柱形外框上,所述自动夹紧装置上的连杆装置通过连杆将滑 块与外框架相连。 4 CN 111595856 A 说 明 书 2/4 页 所述的一种用于拉索桥探伤的爬壁机器人,其特征在于,所述弹簧锁包括第一锁 扣子件、第二锁扣子件、锁扣母件及按钮,所述左半外框上设有导柱,所述第一锁扣子件及 第二锁扣子件上分别设有导槽,并通过导槽设置在导柱上,所述第一锁扣子件及第二锁扣 子件上分别设有弹簧座,且弹簧座之间通过复位弹簧连接,所述第一锁扣子件及第二锁扣 子件上分别设置拉杆,所述拉杆一端与第一锁扣子件及第二锁扣子件活动连接,另一端共 同活动连接在按钮上。 所述的一种用于拉索桥探伤的爬壁机器人,其特征在于,所述外框架上设有安装 座,所述外壳通过销轴活动连接在安装座上,所述外框架上设有安装板,所述外壳内部设有 连接座,所述连接座上活动连接设置推杆,所述推杆上设有弹簧,所述推杆穿设在安装板 上。 所述的一种用于拉索桥探伤的爬壁机器人,其特征在于,所述电机固定设置在中 间外框的顶部位置处。 本发明的有益效果是:通过在八棱柱形外框上设置齿轮轴系、导轨滑块、在滑块上 设置连杆结构,通过较为复杂的齿轮轴系运动,只控制一只电机即可实现四个位置的联动 从而实现四个位置的夹紧运动,并可适用于多种不同粗细的铁索。 附图说明 图1为本发明的整体结构示意图; 图2为本发明的八棱柱形外框结构示意图; 图3为本发明的自动夹紧装置安装结构示意图; 图4为本发明的自动攀爬装置结构示意图; 图5为本发明的驱动装置结构示意图; 图6为本发明的弹簧锁结构示意图; 图7为本发明的自动攀爬装置安装结构示意图; 图8为本发明的中间外框结构示意图。











