
技术摘要:
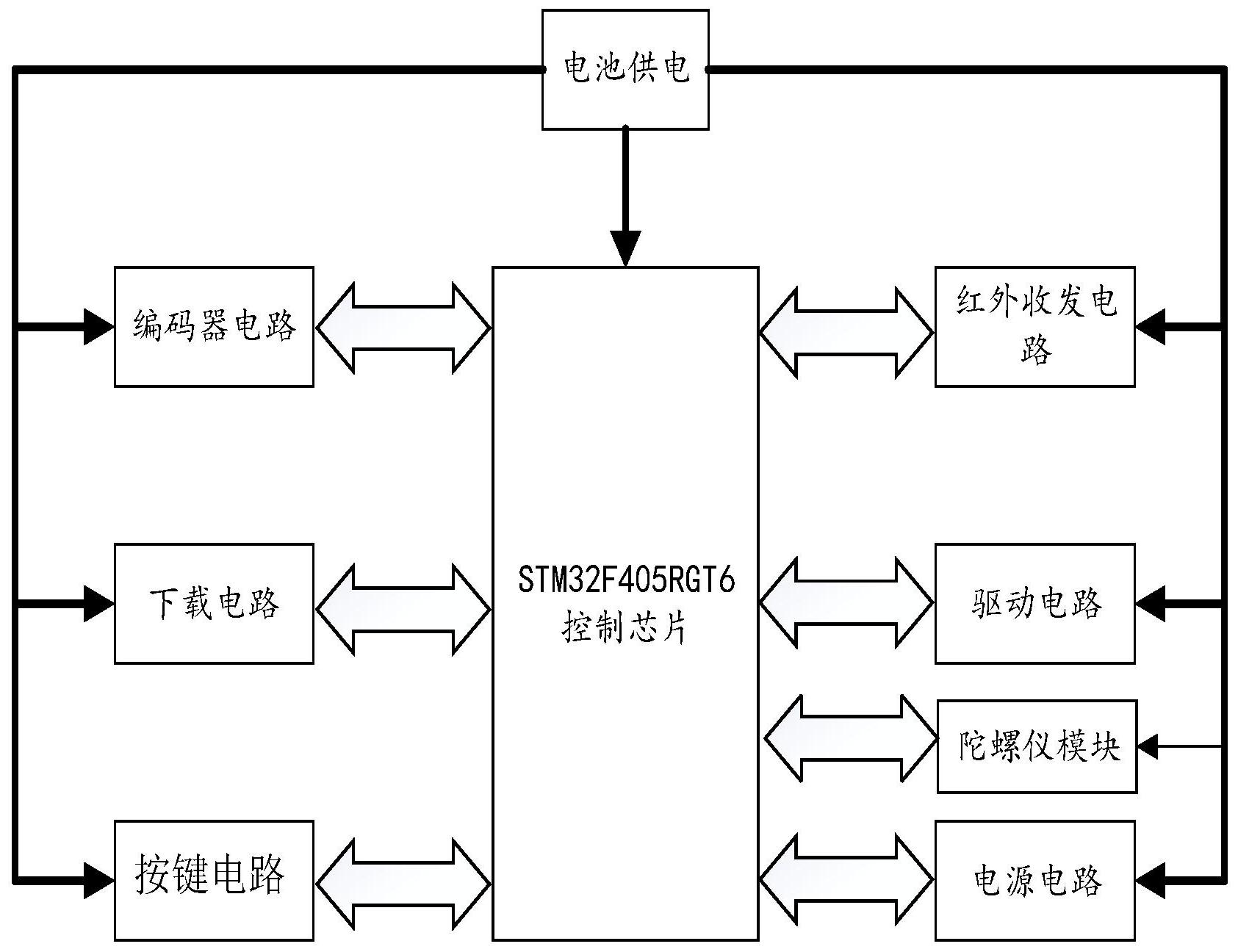
本发明公开了一种半尺寸迷宫机器人控制系统,控制芯片、编码器电路、下载电路、按键电路、红外收发电路、驱动电路、电源电路、电池,所述编码器电路、下载电路、按键电路、红外收发电路、驱动电路、电源电路均与控制芯片电连接,所述电池分别给控制芯片、编码器电路、 全部
背景技术:
半尺寸迷宫机器人,又称为半尺寸电脑鼠,是由普通电脑鼠发展而来。最初的电脑 鼠结构简单,仅由传感器,电机,普通控制芯片完成,后来随着硬件的发展,电脑鼠的构架逐 渐完善,编码器的出现使得电脑鼠的效率大大增加,电脑鼠通过反馈信息调整运行状态,寻 找到达终点的最短路径。 比赛开始后,首先把电脑鼠放入起始点,遮挡红外进行启动后,它就必须自主决定 搜寻算法,并在迷宫中完成直行,转弯,寻找距离终点最短的路途,最后成功到达终点。人类 一直希望创造一个小型类人机器人,它拥有感官,四肢,大脑等,电脑鼠就是一个很好的实 例,在小型半尺寸电脑鼠的基础上进而创造出更加智能的类人机器人,去代替人类完成很 多危险工作。 1977年美国创造出了迷宫机器人电脑鼠这一概念。同年,第一场电脑鼠大赛在美 国举行。1980年,在伦敦举办了欧洲的电脑鼠竞赛。其间的日本观众在这之后把比赛传到日 本。1980年11月日本举办了首届电脑鼠竞赛。1985年8月,在日本举行了第一场世界电脑鼠 大赛。日本队取得了各个组别的最高奖项,荣获世界冠军。1987年10月,新加坡开始了他们 首届电脑鼠比赛。中国的电脑鼠发展的比较晚,2007年,由上海计算机协会的组织在上海师 范大学举办了首届中国电脑鼠国际邀请赛。有30多个队伍参赛。2006年IEEE组织将电脑鼠 规则进行优化。而2016年将半尺寸电脑鼠加入电脑鼠大赛中。 当前的半尺寸迷宫机器人控制系统组成模块单一,无法适应复杂程度较高的路 径。
技术实现要素:
本发明为克服上述现有技术中半尺寸迷宫机器人控制系统组成模块单一,无法适 应复杂程度较高的路径的缺陷,提供一种半尺寸迷宫机器人控制系统。 本发明的首要目的是为解决上述技术问题,本发明的技术方案如下: 一种半尺寸迷宫机器人控制系统,控制芯片、编码器电路、下载电路、按键电路、红 外收发电路、驱动电路、电源电路、电池,所述编码器电路、下载电路、按键电路、红外收发电 路、驱动电路、电源电路均与控制芯片电连接,所述电池分别给控制芯片、编码器电路、下载 电路、按键电路、红外收发电路、驱动电路供电,所述电池还连接至电源电路的输入端,电源 电路的输出端电连接至红外收发电路。 进一步地,所述控制芯片为STM32F405RGT6芯片,所述驱动电路包括DRV8850芯片, 记为U5,电机M1,电容C3、C4、C5、C6、C7,电阻R5、R8、R9、R10、R12,具体连接关系为:DRV8850 芯片的第2引脚、第3引脚、第4引脚均连接至电机M1的正向连接端,DRV8850芯片的第21引 4 CN 111590557 A 说 明 书 2/5 页 脚、第22引脚、第23引脚均连接至电机M1的负向连接端,DRV8850芯片的第17引脚连接至电 容C4的一端,电容C4的另一端分别连接至电容C6的一端、DRV8850芯片的第18引脚、第19引 脚、第20引脚、直流电源正极,电容C6的另一端连接至DRV8850芯片的第1引脚、第12引脚、第 13引脚、第24引脚、第25引脚、电容C7的一端、接地,电容C7的另一端连接至直流电源正极, DRV8850芯片的第5引脚连接至控制芯片的TIM1CH1通道,DRV8850芯片的第6引脚连接至控 制芯片的TIM1CH1N6通道,DRV8850芯片的第7引脚连接至控制芯片的TIM1CH2通道,DRV8850 芯片的第8引脚连接至控制芯片的TIM1CH2N8通道,DRV8850芯片的第9引脚通过电阻R5连接 至直流电源正极,DRV8850芯片的第10引脚通过电容C3连接至电源正极,DRV8850芯片的第 15引脚分别连接至电阻R8的一端、电容C5的一端、3.3V直流电源,所述电容C5的另一端接 地,DRV8850芯片的第14引脚连接电阻R8的另一端、电阻R9的一端,电阻R9的另一端接地, DRV8850芯片的第11引脚通过电阻R10接地,DRV8850芯片的第16引脚通过电阻R12接地。 进一步地,所述红外收发电路包括:芯片FDC6305N、电阻R3、R4、R6、R7、R11、R13,开 关S1、S2,芯片FDC6305N记为U4,U4的第1引脚通过电阻R3连接至控制芯片的IR_DRIVE1连接 端,U4的第3引脚通过电阻R3连接至控制芯片的IR_DRIVE2连接端,U4的第4引脚通过电阻 R11连接至开关S2的第三连接端,开关S2的第一连接端通过电阻R13接地,U4的第6引脚通过 电阻R4连接至开关S1的第三连接端,开关S1的第一连接端通过电阻R6接地,开关S1的第4连 接端和开关S2的第4连接端均连接至控制芯片的IR_D2V连接端,开关S1的第2连接端和开关 S2的第2连接端均接地,U4的第2引脚、第4引脚均接地。 进一步地,所述编码器电路包括:编码芯片TLE5012B、电阻R1、电容C1,其中编码芯 片TLE5012B记为U1,具体连接关系为:U1的第2引脚连接至控制芯片的ENC SCLK连接端,U1 的第3引脚连接至控制芯片的SPICS连接端,U1的第4引脚通过电阻R1连接至控制芯片的ENC SDATA连接端,U1的第8引脚连接至控制芯片的ENCLB连接端,U1的第7引脚接地,U1的第6引 脚分别连接至电容C1的一端、直流电源,电容C1的另一端接地,U1的第5引脚分别连接至控 制芯片的ENCLA连接端。 进一步地,所述电源电路包括:降压转换芯片TPS82130,电阻R25、R26、R27、电容 C13、C14、C15,其中降压转换芯片记为U8,具体连接关系为:U8的第2引脚分别连接至电容 C13的一端、直流电源,U8的第8引脚分别连接至电容C14的一端,电容C13的另一端和电容 C14的另一端均接地,U8的第8引脚连接直流电源,U8的第4引脚、第5引脚均连接驱动电路的 IR_D2V连接端,U8的第7引脚通过电阻R25分别连接至驱动电路的IR_D2V连接端、电容C15的 一端,U8的第6引脚通过电阻R26连接至驱动电路的IR_D2V连接端、电容C15的一端,电容C15 的另一端接地,U8的第6引脚还通过电阻R27接地。 进一步地,所述控制系统还包括有:陀螺仪模块,所述陀螺仪模块输出端与控制芯 片的输入端连接。 进一步地,所述陀螺仪模块包括有:陀螺仪芯片LY3200 ALH、电阻R33、电容C20、 C21、C24,其中陀螺仪芯片LY3200 ALH记为U10,陀螺仪与控制芯片的具体连接关系为:U10 的第1引脚分别连接至直流电源、电容C20的一端,电容C20的另一端接地,U10的第2引脚、第 4引脚、第8引脚接地,U10的第3引脚分别连接至电阻R33的一端,电容C21的一端,电阻R33的 另一端连接至电容C24的一端,电容C24的另一端与电容C21的另一端均接地,U10的第10引 脚、第9引脚均连接至直流电源,U10的第7引脚连接至控制芯片的VREFOUT连接端,U10的第6 5 CN 111590557 A 说 明 书 3/5 页 引脚连接至控制芯片的OUTZOUT连接端。 与现有技术相比,本发明技术方案的有益效果是: 本发明通过构建基于多模块的控制系统,使半尺寸迷宫机器人能够获取多维信息 来进行路径寻找,克服传统半尺寸迷宫机器人控制系统模块单一的缺陷,提高了其对复杂 路径的适应性。 附图说明 图1为本发明的系统原理图。 图2为本发明驱动电路原理图。 图3为本发明红外收发电路原理图。 图4为编码器电路原理图。 图5为本发明电源电路原理图。 图6为本发明陀螺仪模块电路原理图。











