
技术摘要:
公开了一种车辆碰撞处理装置、方法及控制装置,涉及无人车辆技术领域。其中装置包括:碰撞传感器,用于在车辆发生碰撞的情况下提供碰撞信号;信号保持器,用于保持碰撞信号一段预设时间以提供碰撞信号的持续信号;制动执行器,用于以持续信号作为触发信号提供制动力以 全部
背景技术:
无人车辆在运行过程中全程无人驾驶,汽车操纵稳定性及行驶安全性至关重要。 在很多无人车辆中都集成有碰撞传感器,碰撞传感器可以用来监测无人车辆是否与障碍物 发生碰撞。按照控制器局域网(CAN)总线协议,碰撞传感器输出的碰撞信号通过控制器局域 网(CAN)总线与整车控制器(VCU)通信。整车控制器(VCU)根据碰撞信号提供信号值保持预 设时间的持续信号,并将该持续信号提供给电子驻车制动系统(EPB)以制动无人车辆。显 然,当无人车辆发生碰撞时,碰撞传感器提供的碰撞信号需要经由整车控制器(VCU)处理后 才能提供给制动执行器,因此,这增加了碰撞信号的信息传递环节,降低了无人车辆的制动 效率。
技术实现要素:
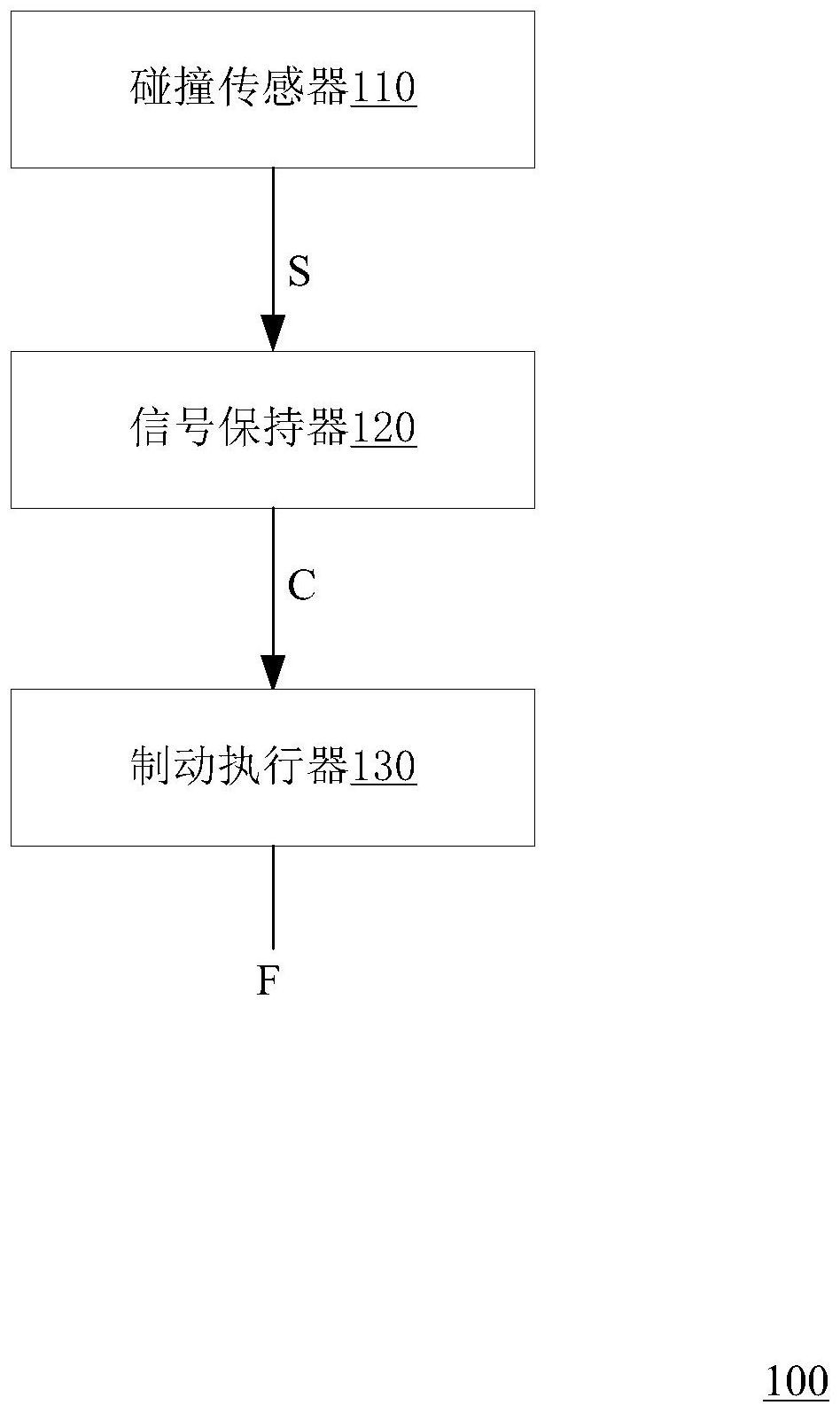
为了克服相关技术中存在的问题,本发明实施例提供了一种车辆碰撞处理装置、 方法及控制装置,利用信号保持器提供碰撞信号的持续信号,直接利用该持续信号触发制 动执行器提供制动力,减少了碰撞信号的信息传递环节,提高了无人车辆的制动效率。 根据本发明实施例的第一方面,提供一种车辆碰撞处理装置,包括:碰撞传感器、 信号保持器和制动执行器, 所述碰撞传感器用于在车辆发生碰撞的情况下提供碰撞信号; 所述信号保持器用于保持所述碰撞信号一段预设时间以提供所述碰撞信号的持 续信号; 所述制动执行器用于以所述持续信号作为触发信号提供制动力以制动所述车辆。 可选地,所述碰撞传感器包括一种或多种类型的碰撞传感器,每种类型的所述碰 撞传感器感测各自的待感测量,并与各自的待感测量阈值比较,当至少一种类型的碰撞传 感器感测到的待感测量大于相应的待感测量阈值时,提供所述碰撞信号。 可选地,所述制动执行器包括多个制动执行器,所述处理装置还包括:幅值检测器 和多个比较器, 所述幅值检测器与所述信号保持器的输出连接,用于检测所述持续信号的幅值信 号; 所述多个比较器与所述幅值检测器的输出连接,所述多个比较器中每个比较器将 所述持续信号的幅值信号和各比较器的输入基准幅值信号作为输入,当所述持续信号的幅 值信号大于相应输入基准幅值信号时产生有效电平。 可选地,所述处理装置还包括:选通器, 所述选通器分别与所述信号保持器的输出、所述多个比较器的输出连接,所述选 4 CN 111591267 A 说 明 书 2/9 页 通器用于根据所述多个比较器的比较结果,将所述持续信号传输给所述多个制动执行器中 的一个或多个制动执行器。 可选地,在所述多个制动执行器中,以所述持续信号作为触发信号启动制动功能 的制动执行器的数量与所述选通器接收到的有效电平数相等。 可选地,设比较器的数目为n,各比较器的输入基准幅值信号分别为b,2b,……nb, 其中b为基准幅值。 可选地,所述处理装置还包括:信号隔离器,所述信号隔离器与所述碰撞传感器的 输出连接,所述信号保持器与所述信号隔离器的输出连接, 在所述车辆发生多次碰撞的情况下,所述信号隔离器用于将所述车辆发生首次碰 撞时提供的碰撞信号传输给所述信号保持器,并且隔离首次碰撞后所述碰撞传感器提供的 碰撞信号。 可选地,在一定持续时间内,所述持续信号的持续时间越长,在所述持续信号的触 发下所述制动执行器提供的制动力越大。 根据本发明实施例的第二方面,提供一种车辆碰撞处理方法,包括: 利用碰撞传感器在车辆发生碰撞的情况下提供碰撞信号; 保持所述碰撞信号一段预设时间以提供所述碰撞信号的持续信号; 以所述持续信号作为触发信号启动制动执行器提供制动力以制动所述车辆。 根据本发明实施例的第三方面,提供一种车辆碰撞处理控制装置,包括: 监测单元,被配置为执行利用碰撞传感器在车辆发生碰撞的情况下提供碰撞信 号; 信号保持单元,被配置为执行保持所述碰撞信号一段预设时间以提供所述碰撞信 号的持续信号; 制动单元,被配置为执行以所述持续信号作为触发信号启动制动执行器提供制动 力以制动所述车辆。 根据本发明实施例的第四方面,提供一种无人车辆,所述无人车辆具有如上所述 的车辆碰撞处理装置。 根据本发明实施例的第五方面,提供一种车辆碰撞处理控制装置,包括:处理器; 用于存储所述处理器可执行指令的存储器;其中,所述处理器被配置为执行上述的车辆碰 撞处理方法。 根据本发明实施例的第六方面,提供一种计算机可读存储介质,所述计算机可读 存储介质存储有计算机指令,所述计算机指令被执行时实现如上所述的车辆碰撞处理方 法。 根据本发明实施例的第七方面,提供一种计算机程序产品,包括计算机程序产品, 所述计算机程序包括程序指令,当所述程序指令被移动终端执行时,使所述移动终端执行 上述车辆碰撞处理方法的步骤。 本发明具有以下优点或有益效果: 当无人车辆发生碰撞时,碰撞传感器提供的碰撞信号无需经由整车控制器(VCU) 处理,利用信号保持器提供碰撞信号的持续信号,直接利用该持续信号触发制动执行器提 供制动力,精简了制动逻辑。信号保持器和碰撞传感器可以集成在一起,车辆碰撞处理装置 5 CN 111591267 A 说 明 书 3/9 页 的功能更加集成化。因此,减少了碰撞信号的信息传递环节,提高了无人车辆的制动效率。 附图说明 通过以下参照附图对本发明实施例的描述,本发明的上述以及其他目的、特征和 优点将更为清楚,在附图中: 图1示出本发明的车辆碰撞处理装置的执行环境的结构示意图。 图2示出本发明实施方式一的车辆碰撞处理装置的结构示意图。 图3示出本发明实施方式二的车辆碰撞处理装置的结构示意图。 图4示出本发明实施方式三的车辆碰撞处理装置的结构示意图。 图5示出本发明实施方式四对应的车辆碰撞处理方法的流程示意图。 图6示出本发明实施方式一对应的车辆碰撞处理方法的流程示意图。 图7示出本发明实施方式二对应的车辆碰撞处理方法的流程示意图。 图8示出本发明实施方式三对应的车辆碰撞处理方法的流程示意图。 图9示出本发明实施方式四对应的车辆碰撞处理方法的流程示意图。 图10示出本发明的车辆碰撞处理控制装置的结构示意图。











