
技术摘要:
进行车辆的行驶控制的车辆控制装置具备:检测单元,其能够检测所述车辆的周围状况;判定单元,其基于所述检测单元中的检测结果,判定前方车辆是否在车宽方向上表现出规定的行为;以及控制单元,其进行所述车辆的转向控制,作为所述车辆的转向控制模式,所述控制单元具 全部
背景技术:
在专利文献1中,公开了如下控制系统,在基于白线(车道标识)的识别结果对本车 辆的行驶进行控制的第一行驶控制下的行驶中,在判断为识别出的白线位置的偏差较大而 不能进行第一行驶控制的情况下,切换为以跟随前方车辆的方式控制本车辆的行驶的第二 行驶控制。 现有技术文献 专利文献 专利文献1:日本特开2004-206275号公报
技术实现要素:
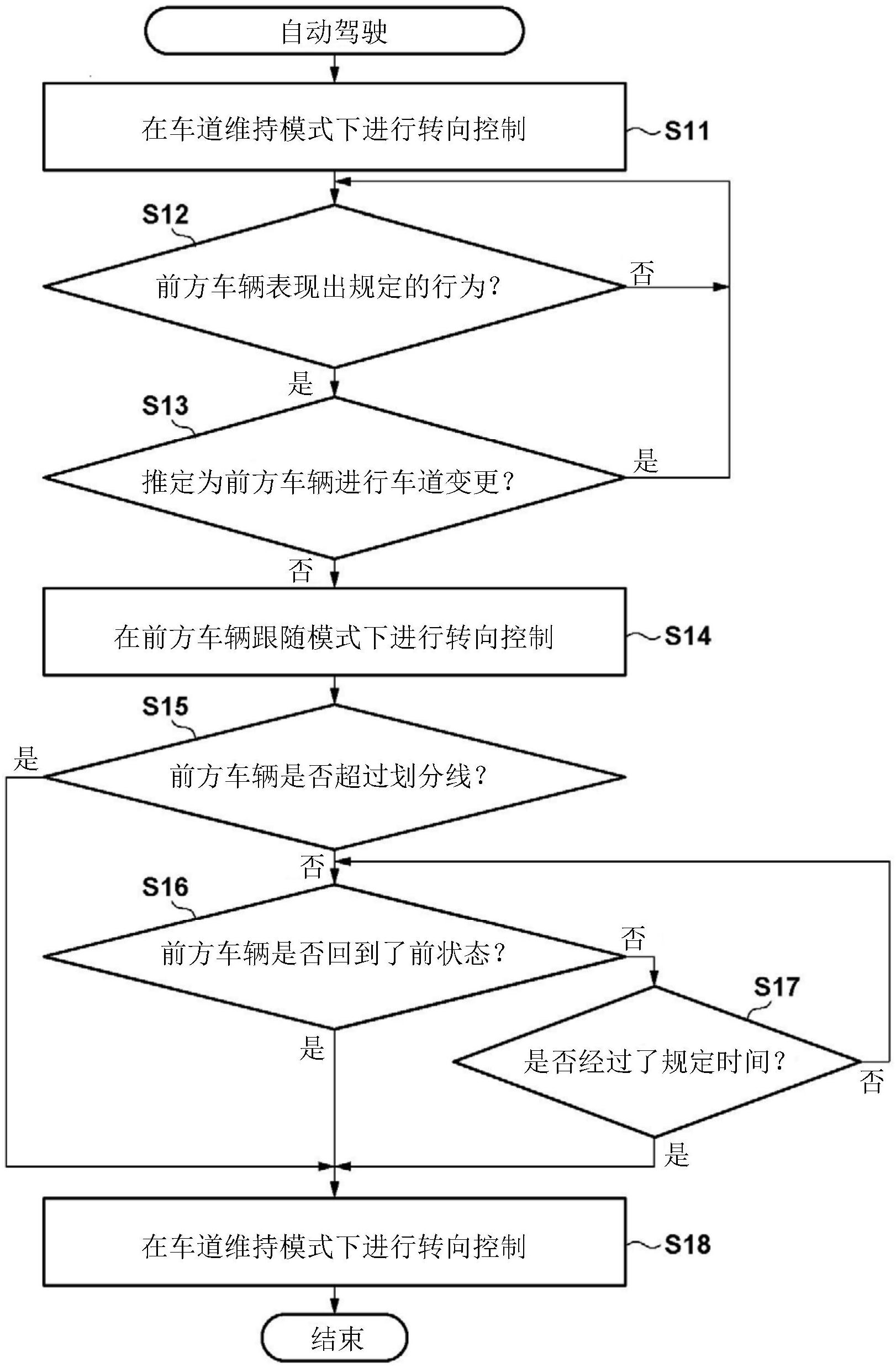
发明所要解决的问题 由于在以跟随前方车辆的方式控制本车的行驶的情况下,对前方车辆的摇晃等也 进行跟随,因此从行驶时的稳定性的观点出发,优选基于白线的识别结果来控制本车的行 驶。另一方面,在行驶车道上存在障碍物的情况下等,如果按照前方车辆中的该障碍物的避 让行动来控制本车辆的行驶,则能够避让开该障碍物的可能性高。 因此,本发明的目的在于适当地避让行驶车道上的障碍物。 用于解决问题的手段 根据本发明,提供一种车辆控制装置,其是进行车辆的行驶控制的车辆控制装置, 其特征在于, 所述车辆控制装置具备: 检测单元,其能够检测所述车辆的周围状况; 判定单元,其基于所述检测单元中的检测结果,判定前方车辆是否在车宽方向上 表现出规定的行为;以及 控制单元,其进行所述车辆的转向控制, 作为所述车辆的转向控制模式,所述控制单元具有基于由所述检测单元检测到的 划分线来进行所述车辆的转向控制的第一模式、和基于由所述检测单元检测到的前方车辆 来进行所述车辆的转向控制的第二模式, 在所述第一模式下的转向控制中由所述判定单元判定为所述前方车辆表现出所 述规定的行为的情况下,所述控制单元从所述第一模式变更为所述第二模式来进行所述车 辆的转向控制。 发明效果 根据本发明,能够适当地避让行驶车道上的障碍物。 本发明的其他特征以及优点通过以附图为参照的以下说明而得以明确。此外,在 4 CN 111587206 A 说 明 书 2/9 页 附图中,对于相同或同样的构成标注相同的附图标记。 附图说明 附图包含于说明书中且构成其一部分,表示本发明的实施方式并与其记述一起用 于说明本发明的原理。 图1是本发明的一个实施方式所涉及的车辆控制装置的框图。 图2是说明本实施方式所涉及的车辆的转向控制的示意图。 图3是表示本实施方式所涉及的车辆的控制例的流程图。 图4是表示针对前方车辆的规定的行为的判定例的图。 图5表示行驶速度与阈值的关系的图。 图6是表示针对前方车辆的规定的行为的判定例的图。











