
技术摘要:
本申请提供一种提梁机行走的同步控制系统,前动力舱控制器的输出端和后动力舱控制器的输出端分别连接主控制器的输入端,主控制器的输出端分别连接前动力舱行走比例阀的输入端和后动力舱行走比例阀的输入端,前动力舱行走比例阀的输出端连接前驱动马达,后动力舱行走比 全部
背景技术:
提梁机是一种为桥梁建设而专门设计的一种门式起重机,提梁机主要由拼装式主 梁、支腿、天车等组成,构件间采用销轴及高强螺栓连接,易于拆装、运输;与普通门式起重 机相比,安装方便快捷,经济实用,适用于经常流动的道路桥梁建设。 提梁机既可两台配合抬吊预制梁,也可以单台起重机配双吊具起吊预制梁,两台 同时起重的提梁机各自的起重量一般为450吨(t),单台起重的提梁机起重量通常可达900 吨。提梁机配置支腿行走、天车行走及天车起吊设备,可以实现全方位机械化动作。提梁机 主要用于将预制梁从制梁台提吊至存梁台位,预制梁养护完成后将其从存梁台位吊运到运 梁车上,作为起重设备完成架桥机的组装和拆卸。 根据市场需求,起重设备朝着大跨度、大吨位方向发展,例如目前有1700吨轮胎式 提梁机,最大起升重量为1700吨,主要工作是对30米、40米、46.5米、53.5米、60米梁,在梁场 进行吊、运工作。由于设备载重大、预制梁种类多、并且梁的起吊点为横向两端,因此将其设 计为两台650吨或850吨轮胎式提梁机实现单动、联动控制。 现有技术中,为提梁机行走的同步控制,通过提梁机前后大车行走时的压力信号 反馈对驱动马达进行流量调节,通过加减固定值电流改变驱动马达的流量而改变速度。 但是,在调整过程中使用加减固定值电流,这就使得电流出现跳变而不是平滑的 稳定的改变过程,从而使设备在前进过程中出现明显的顿挫感,挂载物也会出现松动从而 发生危险。
技术实现要素:
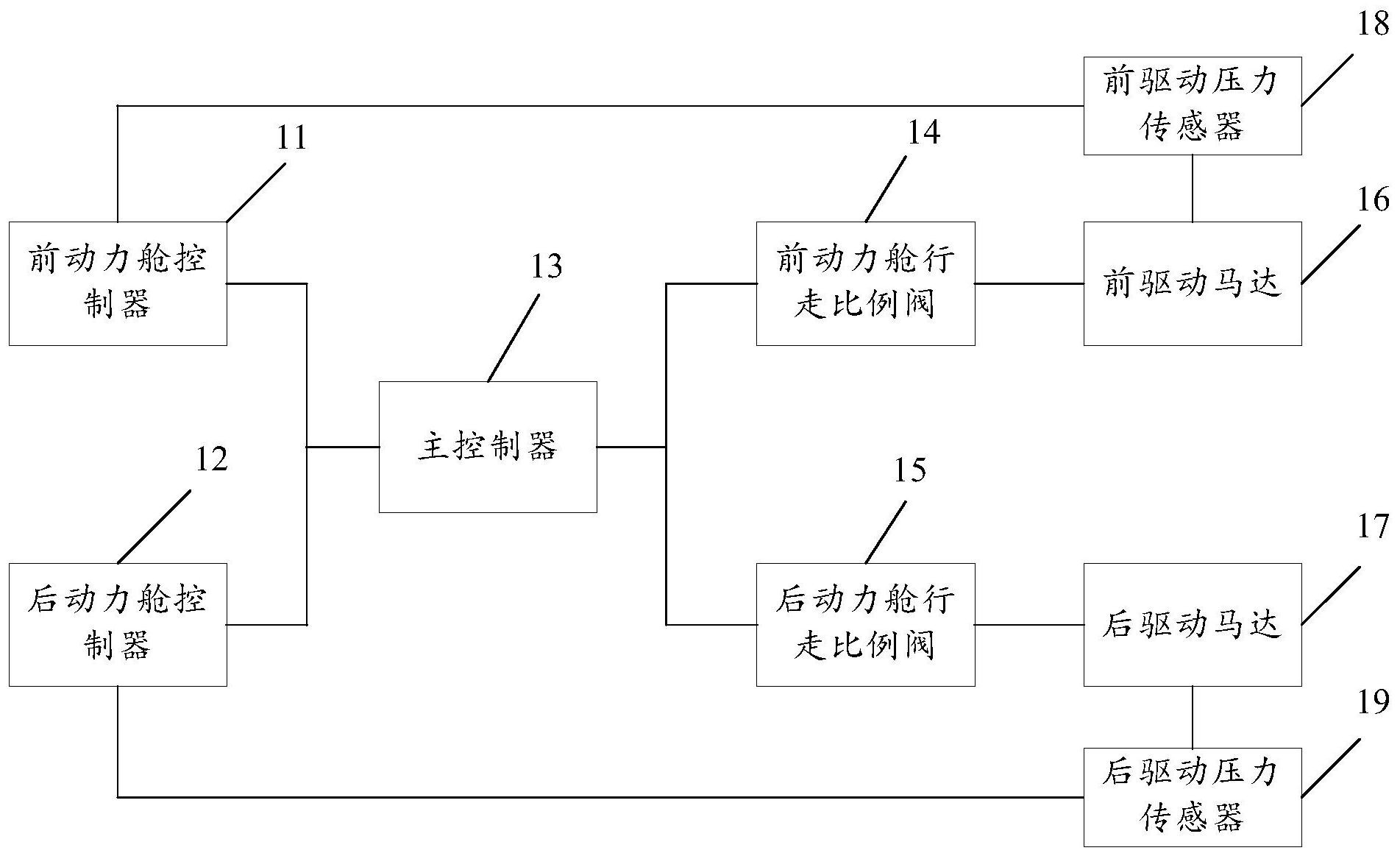
本申请多个方面提供一种提梁机行走的同步控制系统,可以对输出到驱动马达上 的电流进行实时的动态调整,使得前后马达通过压力平衡而同步转速运行,使得设备平稳 前进后退。 本申请的一方面提供一种提梁机行走的同步控制系统,包括:前动力舱控制器、后 动力舱控制器、主控制器、前动力舱行走比例阀、后动力舱行走比例阀、前驱动马达、后驱动 马达、前驱动压力传感器和后驱动压力传感器,其中, 所述前动力舱控制器的输出端和所述后动力舱控制器的输出端分别连接所述主 控制器的输入端; 所述主控制器的输出端分别连接所述前动力舱行走比例阀的输入端和所述后动 力舱行走比例阀的输入端; 所述前动力舱行走比例阀的输出端连接所述前驱动马达; 所述后动力舱行走比例阀的输出端连接所述后驱动马达; 3 CN 111573516 A 说 明 书 2/5 页 所述前驱动压力传感器位于所述前驱动马达以检测所述前驱动马达的压力,所述 前驱动压力传感器的输出端连接所述前动力舱控制器; 所述后驱动压力传感器位于所述后驱动马达以检测所述后驱动马达的压力,所述 后驱动压力传感器的输出端连接所述后动力舱控制器。 可选地,所述主控制器为比例-积分-微分(PID)控制器,所述PID控制器采用如下 公式计算得到输出U(t): 其中,err(t)为所述前动力舱控制器的输入值和所述前驱动压力传感器的输入值 之差或所述后动力舱控制器的输入值和所述后驱动压力传感器的输入值之差,kp为比例系 数,TI为积分时间常数,TD为微分时间常数。 可选地,所述前动力舱行走比例阀和后动力舱行走比例阀输出的电流在第一电流 值和第二电流值之间,其中,所述第一电流值小于所述第二电流值,且所述第一电流值对应 所述前动力舱行走比例阀和后动力舱行走比例阀的最小开度值,所述第二电流值对应所述 前动力舱行走比例阀和后动力舱行走比例阀的最大开度值。 可选地,所述第一电流值为200毫安,所述第二电流值为800毫安。 可选地,所述后驱动马达电流值为所述前驱动马达电流值范围加上正负预定量的 调节量之和。 可选地,所述预定量为10、20、30、40或50。 可选地,当提梁机的行走车辆90度前进或后退时,以行走车辆前或后侧压力为基 准,当调节侧压力大于基准侧预定值时,所述主控制器用于不断减小调节侧驱动泵输出值 从而使调节侧与基准侧速度同步。 可选地,所述前动力舱行走比例阀和所述后动力舱行走比例阀为比例输出电磁 阀。 通过控制器PID程序对采集的信号进行处理,从而对输出到驱动马达上的电流进 行实时的动态调整,使得前后马达通过压力平衡而同步转速运行,使得设备平稳前进后退。 附图说明 图1为本申请一实施例的一种提梁机行走的同步控制系统的结构示意图。











