
技术摘要:
描述了使用由一个测量装置或多个测量装置产生的多个测量点来产生集装箱到着陆表面上的着陆解决方案的系统和方法。具体地,描述了分析多个测量值并根据对数据的分析确定在集装箱搬运设备的参考系中将运输集装箱放置在所述设备的工作空间内存在的着陆表面上的位置和定向 全部
背景技术:
自1955年集装箱运输开始以来,货物运输行业一直在努力提高搬运货物的效率 (http://www .wo rld s hi pping .o rg /a bo ut- the-ind us try /his to ry -of - containerization)。从运输集装箱的出现开始,不久后就出现了在各个运输阶段搬运集装 箱的标准化设备(称为“多式联运”的系统)(http://www.worldshipping.org/about-the- industry/history-of-containerization),所述行业一直在努力寻求更快的搬运、更高的 标准化、更高的产量以及更少的人工干预。这些事情正在通过集装箱搬运设备的自动化的 不断发展来完成。 已存在用于促进集装箱搬运设备的自动化的技术,诸如集装箱起重机(https:// www.porttechnology.org/technical_papers/the_case_for_automated_rtg_container_ handling)。在起重机自动化开始时,涉及不可避免地需要人们进入的领域被认为过于危险 而无法实现自动化。最终,提高搬运生产力并减少等待时间的压力促使行业标准在不与人 们直接接触的领域实现全自动化状态,以及在不可避免地与人们接触的领域实现“半自动 化”,这通常涉及远程操作。然而,最近,所述行业一直在努力寻求在集装箱搬运的所有领域 实现全自动化搬运。本公开特别感兴趣的是陆上转运区(LSTZ)中的自动化,其实例可以在 图12B和图13B中看到。LSTZ区域是堆垛起重机与在道路上运输集装箱的车辆以及与除道路 车辆底盘(road chassis)以外的内部港口设备对接的位置。在过去几年,人们一直对LSTZ 中的全自动化操作非常感兴趣。 LSTZ中的自动化操作面临巨大的挑战。为了设计一种可以在LSTZ中自动搬运的系 统,必须克服由非标准底盘和设备类型、是否存在特定着陆点、操作区域中的人员安全以及 设备在操作区域内的放置所引起的可变性。自动化的主要挑战通常源于人们就其如何将底 盘放置在LSTZ中以及人们在操作期间所处的位置而引入的可变性。然而,这种可变性在 LSTZ的情况下通过施加机械限制(诸如卡车车道周围的路缘石(图12,物品C和图13,物品C) 和供驾驶员进入的工作间)(图12,物品D和图13,物品D)来缓解,只要在该区域操作时遵守 某些规则,所述机械限制就会限制人为引发的可变性。除了人为可变性问题之外,还存在起 重机必须将集装箱着陆在其上的底盘和设备的非标准化问题。尽管运输集装箱在其形状和 大小方面遵循ISO(国际标准化组织)标准,但是运载集装箱的底盘和其他设备并未遵守ISO 9 CN 111587215 A 说 明 书 2/21 页 标准。对给定道路车辆底盘的唯一限制是,在底盘的着陆表面上的某处通常有一个或多个 且优选地多个扭锁,所述扭锁与放置在底盘上的集装箱的角铸件相配合。这意味着至少对 于道路车辆底盘,但不一定对于其他集装箱运输设备,底盘上通常会有四个点,所述四个点 对应于将放置在底盘上的集装箱的四个拐角。这四个点一旦被找到就可以用于产生用于将 集装箱放置在底盘表面上哪个位置的解决方案。然而,需要注意的是,这四个点可以存在于 道路车辆底盘表面上的任意位置,只要它们适当地彼此间隔开以便贴合与它们要配合的集 装箱的四个拐角即可。扭锁的大小和形状也会有所变化,这会影响系统定位扭锁的能力并 影响集装箱的确切着陆位置。图18和图19示出了底盘变化的实例。 如果准备接收集装箱的设备没有扭锁,则由于在表面上没有要搜索的约束点并且 设备中的均匀性不足以纯粹地基于所述设备的光学外观来使用相机或相似传感器从外表 上识别所述设备,因此可能更加难以确定着陆位置。被着陆的设备的外观可能在形状、大 小、颜色、磨损图案等方面有所不同,这会妨碍光学系统有效地标识它们。可以在图18和图 19中观察到若干底盘的状况。注意,图19的底部底盘中缺少扭锁,并且图18中的底盘上的污 垢水平不同。 在过去几年,已经开发了一些系统,所述系统旨在完全自动化操作,并且不需要远 程操作员来执行与LSTZ中的道路车辆底盘和其他设备的交互。所提出的系统和方法必须克 服上述所有挑战以便成功执行它们旨在完全自动化的操作;然而,这些系统和方法使用的 传感器并不能完全应对所述挑战。在该领域中努力的实例包括在第2012/0089320 A1号美 国专利申请公开、第WO 2015/022001 A1号国际专利申请公开、第DE 10 2008 014 125 A1 号和第DE 10 2007 055 316 A1号德国专利申请公开、第EP 2574587 B1号欧洲专利和第EP 2724972 A1号、第EP 2327652 A1号和第EP 2724972 A1号欧洲专利申请公开中描述的那些 努力。然而,尽管作出了这些努力,但是本领域仍然需要解决上述缺陷。
技术实现要素:
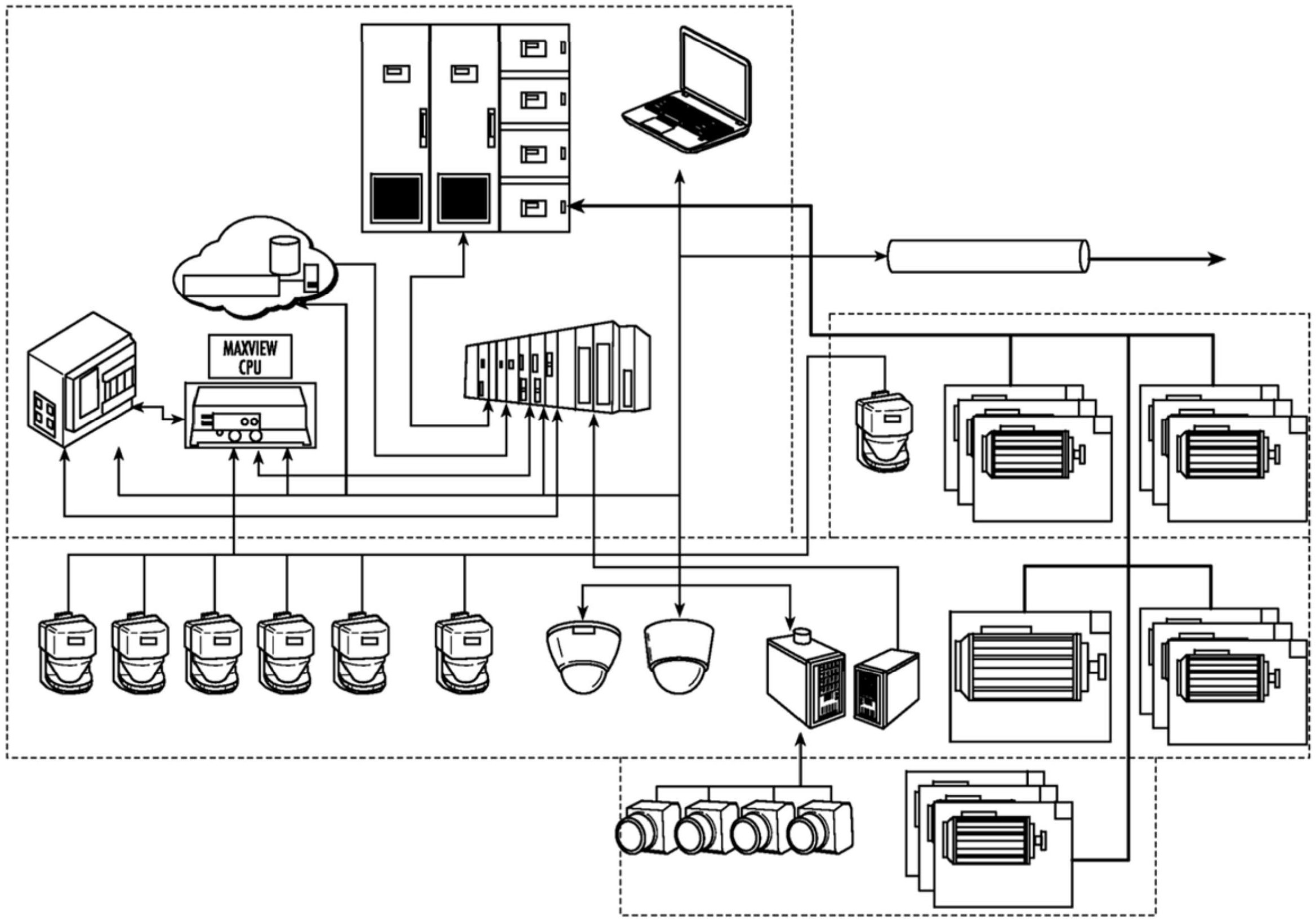
本发明的实施例提供了一种用于以比现有系统更稳健的方式应对上述挑战以产 生更准确的解决方案的方法和系统。在实施例中,本发明描述了使用由以下各项产生的多 个测量点来产生用于诸如集装箱之类的物体到目标设备和目标设备上的着陆表面上的着 陆解决方案的方法:一个测量装置或多个测量装置以及用于执行所述方法的对应装置和对 应的计算机程序产品。着陆表面可以包括任意设备(诸如被设计为在一件集装箱搬运设备 将集装箱从上方放置在着陆表面上时接受集装箱的任意设备)上的任意着陆表面。 在实施例中,本发明描述了分析多个测量点(诸如点云的数据(点云被定义为可以 在笛卡尔坐标空间中表示为x、y和z坐标点的点集合))、然后根据数据分析的阶段来确定集 装箱搬运设备参考系中要将运输集装箱放置在所述设备的工作空间中存在的着陆表面上 的位置的6DoF(自由度)的位置和定向的方法。然后,所述设备的自动化系统可以使用该位 置将运输集装箱自动放置到着陆表面上,而无需人工输入或者需要最少的人工输入或交 互。所述方法和系统适用于在陆上转运区以及在这样的区外部操作,并且因此适用于安装 在可以从上方将集装箱着陆到设备上的任何集装箱搬运设备上。 本发明的实施例的特定方面包括方面1,所述实施例是确定ISO集装箱的着陆解决 方案的方法,所述方法包含:(a)扫描目标设备或底盘以产生点云,在所述点云中,所述目标 10 CN 111587215 A 说 明 书 3/21 页 设备或底盘的着陆表面的特征,诸如一个或多个扭锁,是可区分的;(b)通过处理器分析所 述点云以确定所述特征和/或扭锁的位置;以及(c)基于所述特征和/或扭锁的所述位置来 确定所述目标设备或底盘的所述着陆表面的中心。方面2包括此类方法,其中所述处理器使 用诸如所述目标设备或底盘的所述着陆表面的局部极小值和局部极大值和/或模型卷积之 类的技术来确定凸起和凹陷特征和/或扭锁的位置。方面3是方面1或2的方法,其中使用一 个或多个相机、LiDAR、声纳或光学传感器或其组合来执行所述扫描。 本发明的实施例的特定方面还包括方面4,所述实施例是确定物体在目标设备的 着陆表面上的着陆位置的方法,所述方法包含:(a)提供装载有诸如集装箱之类的第一物体 的诸如底盘之类的目标设备;(b)产生所述第一物体或集装箱在空间中的一个或多个坐标; (c)从所述目标设备或底盘移除所述第一物体或集装箱以露出所述目标设备或底盘的着陆 表面;(d)扫描所述目标设备或底盘并产生所述目标设备或底盘着陆表面的模型;以及(e) 通过基于所述第一物体或集装箱的所述一个或多个坐标确定所述目标设备或底盘着陆表 面在所述模型内的中心来确定所述第一物体或集装箱在所述目标设备或底盘上的着陆位 置。方面5是方面4的方法,其进一步包含确定一个或多个物体或集装箱偏移量以标识所述 目标设备或底盘着陆表面上的附加着陆位置。方面6是方面4或5的方法,其中通过以下操作 确定所述一个或多个偏移量:(a)在所述目标设备或底盘着陆表面上放置一个或多个第二 物体或集装箱;(b)产生所述第二物体或集装箱在空间中的一个或多个坐标;以及(c)基于 所述第二物体或集装箱的所述一个或多个坐标来确定所述第二物体或集装箱偏离所述目 标设备或底盘着陆表面的所述中心的距离。方面7是方面4至6中任一项的方法,其中根据所 述一个或多个偏移量来确定任意数量的着陆位置,诸如其中所述一个或多个集装箱偏移量 包含前集装箱偏移量、后集装箱偏移量或前集装箱偏移量和后集装箱偏移量两者。方面8是 方面4至7中任一项的方法,其进一步包含存储所述第一物体或集装箱的所述着陆位置和所 述一个或多个偏移量,以创建表示所述目标设备或底盘的所述着陆表面的多个着陆位置的 模型库。方面9是方面4至8中任一项的方法,其中通过包含一个或多个相机、LiDAR、声纳或 光学传感器或其组合的一个或多个测量装置执行所述产生。方面10是方面4至9中任一项的 方法,其中所述目标设备或底盘是自动导向车(AGV)底盘、AGV导轨、船边专用车底盘(Bomb Cart chassis)、轨道车、清道车底盘或卡匣。方面11是方面4至10中任一项的方法,其中所 述集装箱是根据国际标准化组织(ISO)设置形状和大小的运输集装箱。方面12是方面4至11 中任一项的方法,其中所述目标设备或底盘着陆表面的所述模型由数据的3D点云表示。方 面13是方面4至12中任一项的方法,其中通过将所述目标设备或底盘扫描一次或多次,例如 2至20次,诸如3至18次或4至15次或5至10次,来产生所述目标设备或底盘着陆表面的所述 模型。方面14是方面4至13中任一项的方法,其中通过一次扫描并通过以实现高分辨率数据 的方式进行扫描而产生所述模型。 本发明的实施例的特定方面还包括方面15,所述实施例是确定诸如集装箱之类的 物体在诸如底盘之类的目标设备的着陆表面上的着陆位置的方法,所述方法包含:(a)扫描 第一目标设备或底盘并提供所述第一目标设备或底盘的模型;(b)将所述第一目标设备或 底盘的所述模型与一个或多个参考目标设备或底盘进行比较,以标识哪个参考目标设备或 底盘在选定匹配度内与所述第一目标设备或底盘匹配;以及(c)使用所述匹配的参考目标 设备或底盘的已知物体或集装箱着陆位置作为所述第一目标设备或底盘上的物体或集装 11 CN 111587215 A 说 明 书 4/21 页 箱着陆位置的代理。方面16是方面15的方法,其中所述集装箱是ISO运输集装箱。方面17是 方面15或16的方法,其中使用相机、LiDAR、声纳或光学传感器中的一者或多者或其组合来 执行所述扫描。方面18是方面15至17中任一项的方法,其中所述第一目标设备或底盘的所 述模型和所述参考目标设备或底盘由数据的3D点云表示。方面19是方面15至18中任一项的 方法,其中所述比较涉及标识长度在所述第一目标设备或底盘的长度的指定范围内的一个 或多个参考目标设备或底盘,和/或使用体素过滤器来标识所述参考目标设备或底盘与所 述第一目标设备或底盘之间的相似度。方面20是方面15至19中任一项的方法,其中所述体 素过滤器比较跨所述3D数据云的一个维度或多个维度的数据。方面21是方面15至20中任一 项的方法,其中所述体素过滤器比较x值、y值和/或z值的任意组合。方面22是方面15至21中 任一项的方法,其中通过以下操作确定所述匹配的参考目标设备底盘的所述已知物体或集 装箱着陆位置:(a)提供装载有第一参考物体或集装箱的参考目标设备或底盘;(b)产生所 述第一参考物体或集装箱在空间中的一个或多个坐标;(c)从所述参考目标设备或底盘移 除所述第一参考物体或集装箱以露出所述参考目标设备或底盘的着陆表面;(d)扫描所述 参考目标设备或底盘并产生所述参考目标设备或底盘着陆表面的模型;以及(e)通过基于 所述第一参考物体或集装箱的所述一个或多个坐标确定所述参考目标设备或底盘的所述 着陆表面在所述模型内的中心来确定所述第一参考物体或集装箱在所述参考目标设备或 底盘上的着陆位置。 本发明的实施例的特定方面还包括方面23,所述实施例是确定目标设备或底盘在 集装箱搬运设备的操作参考系内的定向的方法,所述方法包含:(a)提供表示参考目标设备 或底盘的数据点云;(b)提供表示当前目标设备或底盘的数据点云;(c)将所述参考目标设 备或底盘数据点云定位在集装箱搬运设备的操作参考系内的预期虚拟位置处;(d)在所述 参考目标设备或底盘和所述当前目标设备或底盘的相应数据点云内估计所述参考目标设 备或底盘的着陆表面的第一中心和所述当前目标设备或底盘的着陆表面的第二中心;(e) 通过将所述第一中心与所述第二中心对准来执行第一对准;(f)确定要实现所述第一对准 所需要的从所述第一中心的位置到所述第二中心的位置的诸如在XYZ坐标中的任意平移; (g)通过以另一种方式将所述参考目标设备或底盘的所述着陆表面与所述当前目标设备或 底盘的所述着陆表面对准来执行至少一次第二对准;(h)确定要实现所述第二对准所需要 的所述参考底盘数据点云诸如围绕XYZ轴的任意旋转;以及(i)使用所述平移和/或旋转来 估计所述当前目标设备或底盘在所述集装箱搬运设备的所述操作参考系内的实际定向。方 面24是方面23的方法,其中使用迭代最近点技术来执行所述至少一次第二对准中的一者或 多者。方面25是方面23或24的方法,其中减少或消除表示所述当前目标设备或底盘的所述 数据点云的噪声数据以提供过滤后的当前目标设备或底盘点云。方面26是方面23至25中任 一项的方法,其中所述过滤后的当前目标设备或底盘点云的最大测量点和最小测量点用于 估计所述当前目标设备或底盘的所述着陆表面的所述中心。 本发明的特定实施例还包括方面27,所述实施例是根据用于ISO运输集装箱的目 标设备或底盘的位置和定向来标识所述目标设备或底盘上的着陆位置的方法,所述方法包 含:(a)获得当前目标设备或底盘着陆表面的点云模型,所述点云模型设置在集装箱搬运设 备的参考系中;(b)将参考目标设备或底盘着陆表面的点云模型与所述当前目标设备或底 盘着陆表面的所述点云模型对准;以及(c)由于所述对准而在所述参考系中产生一组坐标, 12 CN 111587215 A 说 明 书 5/21 页 所述坐标表示用于将ISO运输集装箱放置在所述当前目标设备或底盘的所述着陆表面上的 着陆位置。方面28是方面27的方法,其中所述对准包含:将所述参考目标设备或底盘着陆表 面定位在所述集装箱搬运设备的所述参考系中的预期位置和定向处。方面29是方面27或28 的方法,其中所述对准包含:(a)确定所述当前目标设备或底盘的所述着陆表面在所述当前 目标设备或底盘点云模型内的第一中心;(b)确定所述参考目标设备或底盘的所述着陆表 面在所述参考目标设备或底盘点云模型内的第二中心;(c)通过将所述第一中心与所述第 二中心对准来获得航向对准;以及(d)通过迭代地最小化所述当前底盘点云模型中的对应 点与所述参考底盘点云模型中的点之间的距离以实现精细对准来获得所述精细对准。方面 30是方面27至29中任一项的方法,其中迭代地最小化所述距离涉及迭代最近点(ICP)算法。 本发明的实施例的特定方面还包括方面31,所述实施例是标识能够容纳ISO运输 集装箱的目标设备或底盘的类型的方法,所述方法包含:(a)获得当前目标设备或底盘着陆 表面的点云模型;以及(b)将所述当前目标设备或底盘着陆表面的所述点云模型与一个或 多个参考目标设备或底盘着陆表面进行比较,以标识哪个参考目标设备或底盘着陆表面在 选定匹配度内与所述当前目标设备或底盘着陆表面匹配;或者(c)分析所述当前目标设备 或底盘着陆表面的所述点云模型,以标识与所述当前目标设备或底盘着陆表面的所述点云 模型相关联的目标设备或底盘的类型。方面32是方面31的方法,其进一步包含使用神经网 络和参考目标设备或底盘着陆表面的样本来教导所述神经网络什么是匹配的目标设备或 底盘云。方面33是方面31或32的方法,其中所述比较涉及比较从所述当前目标设备或底盘 着陆表面的所述点云模型和从所述参考目标设备或底盘着陆表面的所述点云模型中的一 者或多者获得的元数据。方面34是方面31至33中任一项的方法,其中执行所述比较和/或分 析以标识所述当前目标设备或底盘着陆表面与所述参考目标设备或底盘着陆表面中的一 者或多者之间和/或所述当前目标设备或底盘着陆表面与已知目标设备或底盘着陆表面之 间的表面特性的相似度或差异。方面35是方面31至34中任一项的方法,其中执行所述比较 和/或分析以标识以下一者或多者:(a)连续或不连续表面;(b)数据异常;(c)着陆表面特征 的类型;(d)是否存在一个或多个着陆表面特征,诸如大梁、横梁、支撑件和/或导向件;(e) 诸如大梁、横梁、支撑件和/或导向件之类的一个或多个着陆表面特征相对于相似着陆表面 特征或相对于彼此或相对于另一个参考点的间隔;(d)诸如大梁、横梁、支撑件和/或导向件 之类的着陆表面特征的实际或相对形状、尺寸和/或大小;和/或(e)一个或多个着陆表面轮 廓的一个或多个特性,诸如弯曲、突变点、翘曲和/或斜坡;或这些中的一者或多者的组合。 方面36是方面31至35中任一项的方法,其中从体素过滤器获得所述元数据。方面37是方面 31至36中任一项的方法,其中所述体素过滤器用于分析所述当前目标设备或底盘着陆表面 的所述点云模型和/或所述参考目标设备或底盘着陆表面的所述点云模型中的一者或多者 作为各自覆盖3D空间的一系列框。方面38是方面31至37中任一项的方法,其中所述元数据 包含:(a)每个框中的点数;(b)每个框在X-Y平面中的最大z坐标值;或者(c)是否占用特定 框。方面39是方面31至38中任一项的方法,其中通过以下各项比较所述元数据:(a)二进制 相似度比较;(b)诸如基于具有在云点模型的X-Y平面中可见的点的框的数量来寻找横梁及 其位置;(c)沿着所述底盘的长度测量极大值并调用定义某个底盘的那些感兴趣的极大物 体;(d)或这些中的一者或多者的组合。方面40是方面31至39中任一项的方法,其中所述二 进制相似度比较包含从所述参考目标设备或底盘着陆表面的所述点云模型的所述元数据 13 CN 111587215 A 说 明 书 6/21 页 中减去所述当前目标设备或底盘着陆表面的所述点云模型的元数据,以得出每次比较的误 差。方面41是方面31至40中任一项的方法,其中通过二进制列比较来比较所述元数据。方面 42是方面31至41中任一项的方法,其中所述二进制列比较包含:(a)对所述当前目标设备或 底盘着陆表面以及每个参考目标设备或底盘着陆表面的每一列中的占用框的数量求和以 得出列总数集合;以及(b)比较所述当前目标设备或底盘着陆表面与每个参考目标设备或 底盘着陆表面之间的所述列总数集合以得出每次比较的误差。 本发明的实施例的特定方面还包括方面43,所述实施例是将物体着陆在着陆表面 上的方法,所述方法包含:(a)扫描目标设备或底盘;(b)提供所述目标设备或底盘的模型; (c)将所述模型与一个或多个参考设备或底盘进行比较;(d)标识所述一个或多个参考设备 或底盘中的哪一个在选定匹配度内与所述目标设备或底盘匹配;(e)使用所述匹配的参考 设备或底盘上的已知着陆位置的高度作为代理来确定所述目标设备或底盘上的目标着陆 位置的高度;以及(f)通过以一定的速度降低物体或集装箱、然后在所述物体或集装箱接近 由代理确定的所述目标着陆位置的所述高度时降低所述速度来将所述物体或集装箱着陆 在所述目标着陆位置上。方面44是方面43的方法,其中所述物体或集装箱是ISO运输集装 箱。方面45是方面43或44的方法,其中使用相机、LiDAR、声纳或光学传感器中的一者或多者 或其组合来执行所述扫描。方面46是方面43至45中任一项的方法,其中所述目标设备或底 盘和所述参考设备或底盘的所述模型由数据的3D点云表示。方面47是方面43至46中任一项 的方法,其中所述比较涉及标识长度在所述目标设备或底盘的长度的指定范围内的一个或 多个参考设备或底盘,和/或使用体素过滤器来标识所述参考设备或底盘与所述目标设备 或底盘之间的相似度。方面48是方面43至47中任一项的方法,其中所述体素过滤器比较跨 所述3D数据云的一个维度或多个维度的数据。方面49是方面43至48中任一项的方法,其中 所述体素过滤器比较x值、y值和/或z值的任意组合。 本发明的实施例的特定方面还包括方面50,所述实施例是将ISO运输集装箱着陆 在目标设备或底盘上的方法,所述方法包含:(a)获得当前目标设备或底盘着陆表面的点云 模型,所述点云模型设置在集装箱搬运设备的参考系中;(b)将参考设备或底盘着陆表面的 点云模型与所述当前目标设备或底盘着陆表面的所述点云模型对准;(c)由于所述对准而 在所述参考系中产生一组坐标,所述坐标表示用于将ISO运输集装箱放置在所述当前目标 设备或底盘的所述着陆表面上的目标着陆位置和其高度;以及(d)通过以一定的速度降低 所述ISO运输集装箱、然后在所述ISO运输集装箱接近所述目标着陆位置的所述高度时降低 所述速度来将所述ISO运输集装箱着陆在所述当前目标设备或底盘的所述着陆表面上。方 面51是方面50的方法,其中所述对准包含:将所述参考设备或底盘着陆表面定位在所述集 装箱搬运设备的所述参考系中的预期位置和定向处。 本发明的实施例的特定方面包括方面52,所述实施例是将ISO运输集装箱着陆的 方法,所述方法包含:(a)获得目标设备或底盘着陆表面的点云模型;以及(b)将所述目标设 备或底盘着陆表面的所述点云模型与一个或多个参考设备或底盘着陆表面进行比较,以标 识哪个参考设备或底盘着陆表面在选定匹配度内与所述目标设备或底盘着陆表面匹配;或 者(c)分析所述目标设备或底盘着陆表面的所述点云模型,以标识与所述目标设备或底盘 着陆表面的所述点云模型相关联的设备或底盘的类型;(d)确定所述目标设备或底盘的所 述着陆表面的至少高度;以及(e)通过以一定的速度降低ISO运输集装箱、然后在所述ISO运 14 CN 111587215 A 说 明 书 7/21 页 输集装箱接近所述目标设备或底盘的所述着陆表面的所述高度时降低所述速度来将所述 ISO运输集装箱着陆在所述目标设备或底盘的所述着陆表面上。 本发明的实施例的特定方面包括方面53,所述实施例是将物体或集装箱着陆在着 陆表面上的方法,所述方法包含:(a)提供表示参考设备或底盘的数据点云;(b)提供表示目 标设备或底盘的数据点云;(c)将所述参考设备或底盘数据点云定位在集装箱搬运设备的 操作参考系内的预期虚拟位置处;(d)在所述参考设备或底盘和所述目标设备或底盘的相 应数据点云内估计所述参考设备或底盘的着陆表面的第一中心和所述目标设备或底盘的 着陆表面的第二中心;(e)通过将所述第一中心与所述第二中心对准来执行第一对准;(f) 确定要实现所述第一对准所需要的从所述第一中心的位置到所述第二中心的位置的诸如 在XYZ坐标中的任意平移;(g)通过以另一种方式将所述参考设备或底盘的所述着陆表面与 所述目标设备或底盘的所述着陆表面对准来执行至少一次第二对准;(h)确定要实现所述 第二对准所需要的所述参考底盘数据点云诸如围绕XYZ轴的任意旋转;(i)使用所述平移 和/或旋转来估计所述目标设备或底盘的所述着陆表面的实际高度;以及(j)通过以一定的 速度降低物体或集装箱、然后在所述物体或集装箱接近所述目标设备或底盘的所述着陆表 面的所述高度时降低所述速度来将所述物体或集装箱着陆在所述目标设备或底盘的所述 着陆表面上。方面54是方面53的方法,其中所述物体或集装箱是ISO运输集装箱。 本发明的实施例的特定方面还包括方面55,所述实施例是系统,所述系统包含: (a)集装箱搬运设备;(b)一个或多个测量装置,所述一个或多个测量装置放置在所述集装 箱搬运设备上或附近;(c)一或多个处理器;以及(d)存储器,所述存储器包含计算机可执行 指令集合,所述计算机可执行指令集合被配置为指示所述一个或多个处理器执行方面1至 54中任一项的方法。方面56是方面55的系统,其中所述存储器存储在非暂时性计算机可读 存储介质上。方面57是方面55或56的系统,其中所述一个或多个测量装置包含相机、LiDAR、 声纳或光学传感器,或这些中的一者或多者的组合。方面58是方面55至57中任一项的系统, 其中所述集装箱搬运设备包含:(a)运动控制系统;以及(b)集装箱升降装置,诸如吊具。方 面59是方面55至58中任一项的系统,其中所述一个或多个测量装置放置在所述集装箱搬运 设备或其移动部分上。 在前面的详细描述中,本发明的附加实施例和方面将变得显而易见。 附图说明 附图示出了本发明的实施例的某些方面,并且不应被用来限制本发明。附图与书 面描述一起用于解释本发明的某些原理。 图1是卸载后AGV的示意图。 图2是卸载后的和装载有ISO标准集装箱的船边专用车的示意图。 图3是ISO标准运输集装箱(40英尺)的示意图。 图4A至图4B是集装箱起重机的示意图。 图5是ISO标准角铸件的示意图。 图6是道路车辆底盘(卸载后)的示意图。 图7是根据本发明的实施例的在陆上转运区中的道路车辆底盘的点云的渲染。 图8是处于40英尺位置的吊具的示意图。 15 CN 111587215 A 说 明 书 8/21 页 图9是扭锁的示意图。 图10是根据本发明的实施例的系统拓扑的示意图。 图11是根据本发明的实施例的测量装置配置的示意图。 图12是示出陆上转运区的透视图的图像。 图13是陆上转运区的示意图。 图14是示出底盘样式的变化的示意图。 图15A至图15C是根据本发明实施例的底盘及其模型云的示意图。 图16是示出底盘俯视图的示意图。 图17是示出底盘侧视图的示意图。 图18是示出底盘状况和变化的图像。 图19是示出底盘状况和变化的图像。 图20是根据本发明的实施例的示例性操作程序的流程图。 图21是具有集装箱和已知位置的底盘的示意图。 图22是具有已知装载位置的底盘的示意图。 图23是示出根据本发明的实施例的确定前集装箱偏移量的示意图。 图24是根据本发明的实施例的具有前集装箱偏移量的底盘的示意图。 图25是示出根据本发明的实施例的确定后集装箱偏移量的示意图。 图26是根据本发明的实施例的具有前偏移量和后偏移量的底盘的示意图。 图27是根据本发明的实施例的40英尺扭锁被接合并被检测到的底盘的示意图。 图28是根据本发明的实施例的具有检测到的扭锁和集装箱目标位置/定向的底盘 的示意图。 图29A至图29C是示出底盘变化的示意图。 图30是根据本发明的实施例的底盘的模型云的示意图。 图31是根据本发明的实施例的底盘的当前扫描云的示意图。 图32是根据本发明的实施例的二进制相似度比较的示意图。 图33是根据本发明的实施例的二进制列比较的示意图。 图34是示出根据本发明的实施例的车道中的预期底盘位置的示意图。 图35是根据本发明的实施例的处于期望位置的模型云的示意图。 图36是根据本发明的实施例的车道中的实际底盘位置的示意图。 图37A至图37B是示出根据本发明的实施例的从停放在车道中的实际底盘采样的 数据的示意图。 图38是根据本发明的实施例的在理想位置的模型云和在实际位置的当前数据云 的示意图。 图39是示出根据本发明的实施例的模型云与实际云的初始粗略对准的示意图。 图40是示出根据本发明实施例的在ICP(迭代最近点)之后的最终对准的示意图。 图41是示出典型的陆上转运区的图像。 图42A和图42B是示出根据本发明的实施例的装载有双二十的底盘的原始数据(图 42A)和过滤后数据(图42B)的渲染。 图43A至图43F是示出根据本发明的实施例的针对若干底盘类型的一系列过滤后 16 CN 111587215 A 说 明 书 9/21 页 扫描的渲染。











