
技术摘要:
本发明提供了一种雷达地形数据处理方法,针对接收雷达测地模式下的回波幅度数据对其进行处理,对数据从方位、俯仰以及距离单元,通过遍历每一位上的回波数据,三方位对其进行数据与数据之间的相关,对其中的异常数据进行优化。本发明采用的三方位的处理确保通过每一位 全部
背景技术:
在雷达使用过程中,对雷达阵地全距离段的地形进行测量分析,利用算法对地形 数据进行处理,得到雷达遮蔽角参数,用于控制波束扫描角度,规避地形对雷达波束影响, 能够使雷达捕捉目标更加精准。 目前雷达控制波束对全方位全距离段进行扫描,通过雷达前端的地形数据获得遮 蔽角。由于地形复杂,返回的地形数据可能存在杂波、气象等其他因素的影响,造成部分地 形数据异常(失真),如果异常(失真)数据使用不合理算法进行处理,使用了该数据形成的 异常遮蔽角数据就会导致雷达波束探测过高或过低探测到地面,雷达将捕获不到空中的目 标。 为了使雷达捕获目标更快更精准,就必须清楚雷达捕获目标方位上的准确地形数 据,错误失真的地形数据使得雷达捕获目标能力下降。就目前获取雷达地形的数据有两种 途径,一种是利用各种类型矢量地图生成地形数据,第二种是利用雷达的地形测地模式,通 过接收到雷达回波幅度,然后进行数据处理得到地形数据,第一种如果拿不到被探测方的 矢量地图信息,则该途径就不能获取到地形数据,存在局限性;第二种方式雷达工作时主动 获取到地形回波数据,通过算法进行处理得到实时地形遮蔽角数据。就目前使用的处理地 形回波数据算法,得到的地形遮蔽角数据存在失真,原因在于处理过程中仅在方位维或者 俯仰维进行处理的,没有对方位、俯仰和距离之间进行相关再处理,导致部分异常数据不能 被处理。
技术实现要素:
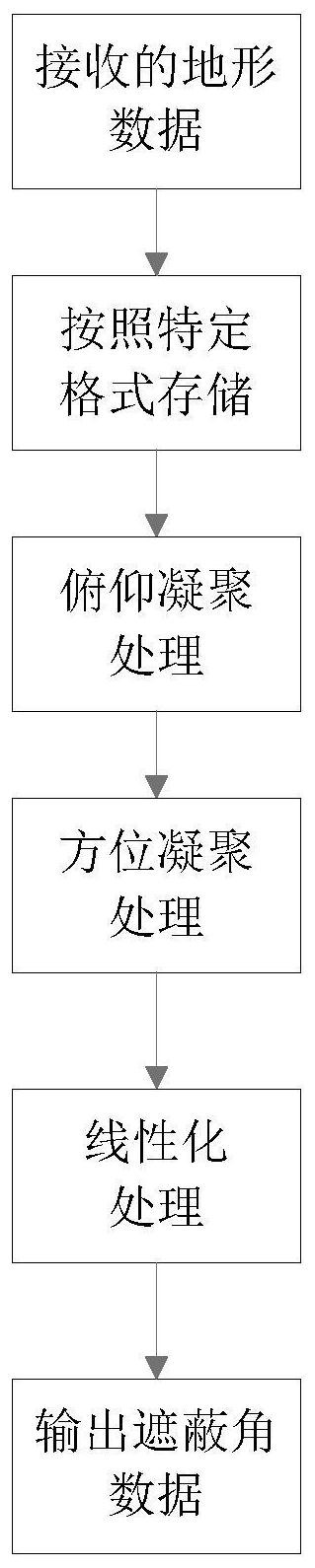
为了克服现有技术的不足,本发明针对具备地形测量模式的雷达,提供一种雷达 地形数据处理方法,在地形测量模式下对接收的回波地形数据通过算法进行俯仰凝聚、方 位凝聚以及线性化处理,得到与实际地形相似度较高的地形遮蔽角。 本发明解决其技术问题所采用的技术方案包括以下步骤: 步骤一,对接收到的地形数据的第一个波束中第一个距离单元对应的每个俯仰对 应的回波幅度值进行排序,取所有幅度值的最大值LM与设定的门限值M1进行比较,如果LM大 于M1,则记录LM对应的俯仰频点,否则将LM对应的俯仰频点记录为最小俯仰角的频点,并取 排序中第二大的俯仰幅度值LM-1与LM对比,若LM与LM-1之差大于设定门限值M2,则在排序中保 留LM,否则保留最小俯仰角对应的频点; 步骤二,重复步骤一处理n次,n为距离单元个数,遍历各个距离单元,得到数据 Data1[n*Cnt]; 步骤三,重复步骤一和步骤二m次,m为波束的个数,得到俯仰凝聚后的数据Data2 [m*n*Cnt]; 3 CN 111610521 A 说 明 书 2/5 页 步骤四,俯仰凝聚后的结果数据Data2[m*n*Cnt]进行方位凝聚,具体步骤如下: 1)数据Data2[m*n*Cnt]中第一个方位波束上有对应Cnt个俯仰角,对其进行关联 处理,每相邻两个俯仰角中,后一个俯仰角减去前俯仰角,如果后一个俯仰角减去前俯仰角 大于设定的门限值M3且该俯仰角减去后俯仰角也大于设定门限值M3,则此俯仰角=(前俯 仰角 后俯仰角)/2;否则不进行处理,输出数据Data3[Cnt]; 2)用Data3[Cnt]数据的第一个俯仰角减去第二个俯仰角,若大于设定门限值M4, 则将第二个俯仰角赋值给第一个;否则不进行处理;自前向后遍历Data3[Cnt]的所有数据, 得到Data4[Cnt]; 3)对Data4[Cnt]数据进行处理,倒数第二个俯仰角减去最后一个俯仰角大于设定 门限值M4,则最后一个俯仰角的值赋给倒数第二个俯仰角;自后向强遍历Data4[Cnt]的所 有数据,得到Data5[Cnt]; 4)对所有波束重复执行步骤1)~3),输出数据Data5[m*Cnt]; 5)数据Data5[m*Cnt]中相邻波束的相同距离单元进行处理,中间波束同一个距离 单元的俯仰角减去前一个波束同一个距离单元的俯仰角大于设定门限值M5且中间波束同 一个距离单元减去后一波束同一个距离单元大于设定门限值M5,则中间波束同一个距离单 元等于前加后除于2,否则不处理,输出数据Data6; 步骤五,对数据Data6进行线性化处理,如果同一个波束中的俯仰角前一个比后一 个大,则将后一个值赋给前一个,按此方法从前往后遍历该波束的所有俯仰角; 步骤六,重复步骤五,遍历数据Data6的每一个方位波束,输出数据Data7,即为当 前的地形的遮蔽角数据。 本发明的有益效果是:针对接收雷达测地模式下的回波幅度数据对其进行处理, 对数据从方位、俯仰以及距离单元,通过遍历每一位上的回波数据,三方位对其进行数据与 数据之间的相关,对其中的异常数据进行很好的优化。在测地模式准确度很高的情况下,简 单处理就可以获取到地形数据,当气象、地杂波等对雷达的影响较大,简单处理地形数据会 导致地形遮蔽角失真,本发明采用的三方位的处理确保通过每一位数据与周围数据进行互 相比较关联,对异常数据进行优化处理,让地形数据更真实。 附图说明 图1是本算法的处理流程示意图; 图2是方位上波束的距离单元与俯仰关系示意图; 图3是经过方位凝聚后的方位上波束的距离单元与俯仰关系示意图; 图4是方位上波束的距离单元与俯仰关系示意图; 图5是对图4经过前后俯仰进行顺序对比处理得出的距离单元与俯仰关系示意图; 图6是俯仰进行倒序处理对比前的距离单元与俯仰关系示意图; 图7是俯仰进行倒序处理对比后的距离单元与俯仰关系示意图; 图8是相邻波束间的相同距离单元进行处理的距离单元与俯仰关系示意图; 图9是相邻波束间距离单元与俯仰关系示意图; 图10是对图9线性化处理后的距离单元与俯仰关系示意图; 图11是采集到的原始地形数据示意图; 4 CN 111610521 A 说 明 书 3/5 页 图12是简单算法处理的结果示意图; 图13是本发明算法处理的结果示意图。











