
技术摘要:
本申请提供了一种用于多机器人协作建图的智能优化方法及系统。其中方法包括:系统初始化;建立一个初始全局地图;在多机器人智能优化系统中,每个机器人利用视觉传感器、超声波传感器、红外传感器和激光雷达等设备探测环境,并且在运动规划过程中设定目标评价参数构建 全部
背景技术:
地图构建是移动机器人研究领域中的基本问题与研究热点,也是移动机器人实现 自主导航的关键。近年来基于多机器人协作的地图构建问题正逐渐获得越来越多的关注。 与单机器人相比使用多个机器人进行协作建图具有高效、高精度、高鲁棒性以及低成本等 优点,所以更加适合用于实际复杂的场景。 到目前为止,针对多机器人协作构建地图的研究还不够成熟,尤其缺乏针对复杂 环境的协作建图方法很少。 目前,如专利申请CN201910635641.7提供一种具有自动建图和路径规划功能的作 业平台及其控制方法,专利申请CN201910585098.4提供一种用于移动机器人自动建图任务 的路径优化方法。上述两种方法建图效率不高,未能提供多种机器人协同建图从而提高建 图效率的方法。
技术实现要素:
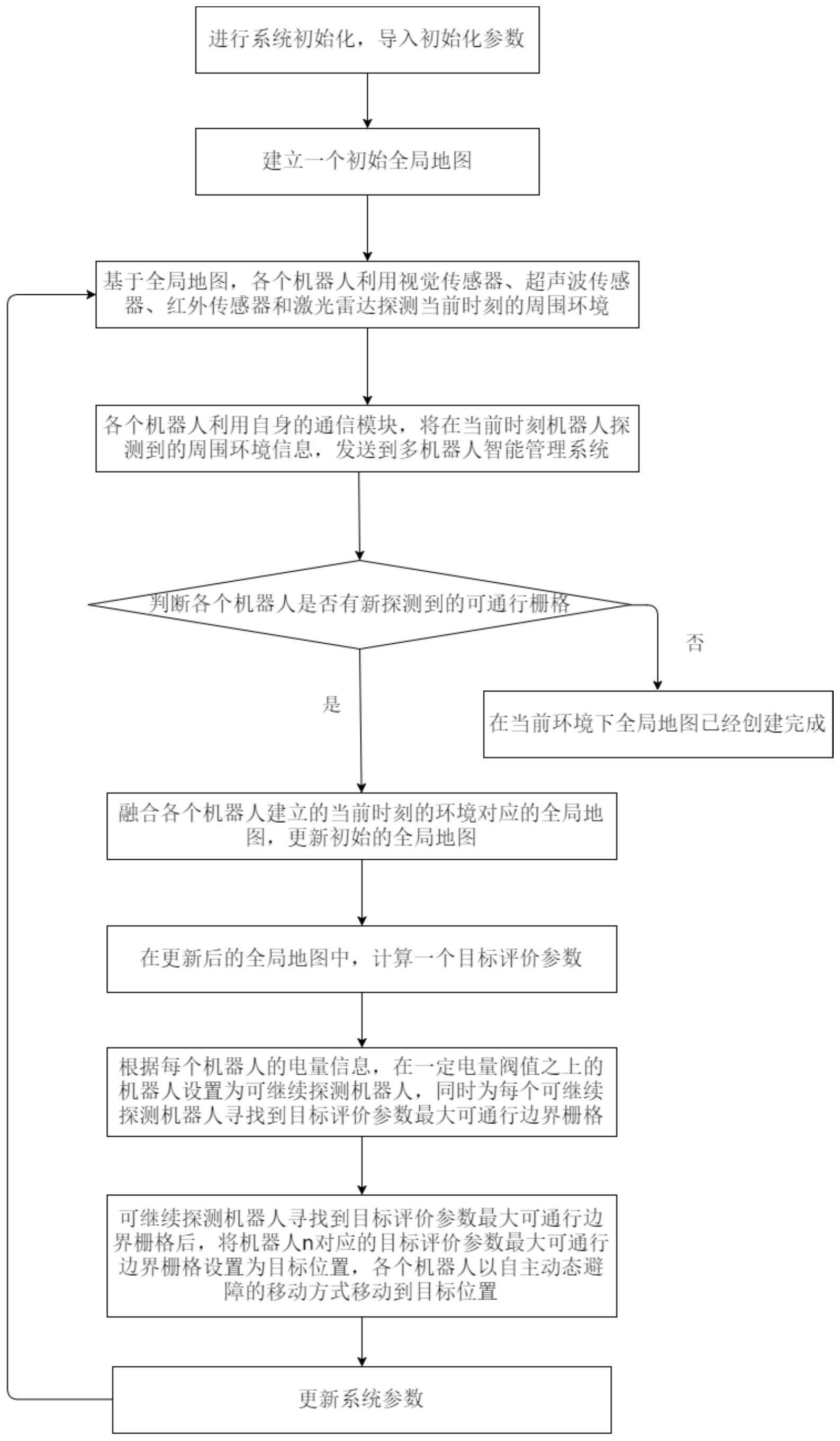
针对以上技术问题,本申请提供一种用于多机器人协作建图的智能优化方法及系 统。 本申请是通过如下技术方案实现的: 一种用于多机器人协作建图的智能优化方法,该方法包括如下步骤: 步骤1,进行系统初始化,导入初始化参数; 包括:机器人总数量、各个机器人的运行参数以及各个机器人当前的位置。并对每 个机器人进行编号,编号为:1、…、n、…、m、…、N,其中,n,m为多机器人智能管理系统中机器 人其中的编号,N为多机器人智能管理系统中的机器人总数量; 步骤2,建立一个初始全局地图; 所述初始全局地图为二维空间地图,二维空间地图的范围大小,根据机器人的满 电状态理论最大移动距离、多机器人智能管理系统存储内存空间、多机器人智能管理系统 决策可接受计算时间,进行设置。基于栅格法将所述二维空间地图设置成多个栅格,栅格大 小的划分取决于机器人的外廓大小,每个单元栅格的边长为机器人最大外廓长度加上预设 定的避障安全距离。初始的全局地图的各个栅格中除了各个机器人当前的位置所在的栅格 外都被设置是不可通行的栅格,各个机器人当前的位置所在的栅格都被设置为可通行的栅 格; 步骤3,基于全局地图,各个机器人利用视觉传感器、超声波传感器、红外传感器和 激光雷达探测当前时刻的周围环境; 包括:机器人探测墙体或其他障碍物的表面信息、同时探测可以通行的区域,针对 4 CN 111609848 A 说 明 书 2/5 页 可通行区域,其所占的初始全局地图中的栅格由不可通行的栅格更改为可通行栅格,再根 据探测到的墙体或其他障碍物的表面信息,与障碍物相邻的可通行栅格都设置为可通行边 界栅格,为机器人n探测到的可通行边界栅格进行编号,编号为:n1、…、ni、…、nI,其中,n为 机器人的编号,ni为机器人n探测到的可通行边界栅格中的一个栅格,I为机器人n探测到的 可通行边界栅格的总数量; 步骤4,各个机器人利用自身的通信模块,将在当前时刻机器人探测到的周围环境 信息,发送到多机器人智能管理系统; 所述周围环境信息包括:时间信息、机器人当前位置所占的栅格信息,机器人的电 量; 步骤5,判断各个机器人是否有新探测到的可通行栅格,如果没有新探测到的可通 行栅格,则在当前环境下全局地图已经创建完成;如果有新探测到的可通行栅格,则执行步 骤6; 步骤6,融合各个机器人建立的当前时刻的环境对应的全局地图,更新初始的全局 地图; 更新初始的全局地图包括:全局地图中更新机器人探测到的可通行区域对应的可 通行栅格,同时将各个机器人探测到的可通行栅格、可通行边界栅格及其对应的编号存入 相应的数据库; 步骤7,在更新后的全局地图中,利用如下公式为机器人n探测到的可通行边界栅 格ni计算一个目标评价参数; 其中,C(ni)为机器人n探测到的可通行边界栅格ni的目标评价参数,n,m为机器人 的编号,ni为机器人n探测到的可通行边界栅格的编号,S(ni,m)为机器人n探测到的可通行 边界栅格ni到机器人m当前位置所占的栅格的距离; 步骤8,根据每个机器人的电量信息,在一定电量阀值之上的机器人设置为可继续 探测机器人,同时为每个可继续探测机器人寻找到目标评价参数最大可通行边界栅格。 如果存在多个目标评价参数最大的可通行边界栅格时,则按照设定的栅格选择规 则选择其中一个可通行边界栅格,设定的栅格选择规则为栅格在全局地图中偏某个方向或 者靠某个位置近则优先被选择的规则。 如果存在多个机器人选择的可通行边界栅格相同时,则按照设定的机器人选择规 则选择其中一个机器人依然设置为可继续探测机器人,其他机器人设置为不可继续探测机 器人,这些不可继续探测机器人回到最初的位置,设定的机器人选择规则为机器人的电量 越多或者靠某个位置近则优先被选择为可继续探测的规则。 步骤9,可继续探测机器人寻找到目标评价参数最大可通行边界栅格后,将机器人 n对应的目标评价参数最大可通行边界栅格设置为目标位置,各个机器人以自主动态避障 的移动方式移动到目标位置; 步骤10,更新系统参数,转到步骤3; 具体包括:导入系统内所有可继续探测机器人的总数量、各个可继续探测机器人 5 CN 111609848 A 说 明 书 3/5 页 的运行参数,同时将各个可继续探测机器人到达的目标位置设置为当前的位置。再对每个 可继续探测机器人重新进行编号,编号为:1、…、n、…、m、…、N,其中,n,m为多机器人智能管 理系统中可继续探测机器人其中的编号,N为多机器人智能管理系统中的可继续探测机器 人总数量。 本申请还提出一种用于多机器人协作建图的智能优化系统,该智能优化系统包 括: 处理器,用于执行所述用于多机器人协作建图的智能优化方法程序; 机器人环境探测模块,包括视觉传感器、超声波传感器(即超声波雷达)、红外传感 器和激光雷达等设备; 所述视觉传感器包括:单目摄像头、双目摄像头、深度摄像头。 机器人通信交互模块,能够将机器人数据传递到智能优化系统; 所述机器人通信交互模块,包括:4G、5G、WIFI等多种方式的一种或几种的组合; 存储指令的存储器,用来保存用于多机器人协作建图的智能优化方法的程序。 与现有技术相比,本发明的优点在于: 本申请运算效率高,在复杂未知的环境中也能够高效地使多个机器人快速探测得 到环境地图。 附图说明 图1为本申请的一种用于多机器人协作建图的智能优化方法流程示意图;











